




DFRobot SEN0142 MPU6050 6-осевой гироскоп-акселерометр IMU модуль с I2C цифровым процессором движения для Arduino & Робототехника
DFRobot SEN0142 MPU6050 6-осевой гироскоп-акселерометр IMU модуль с I2C цифровым процессором движения для Arduino & Робототехника
DFRobot
Не удалось загрузить сведения о доступности самовывоза
Обзор
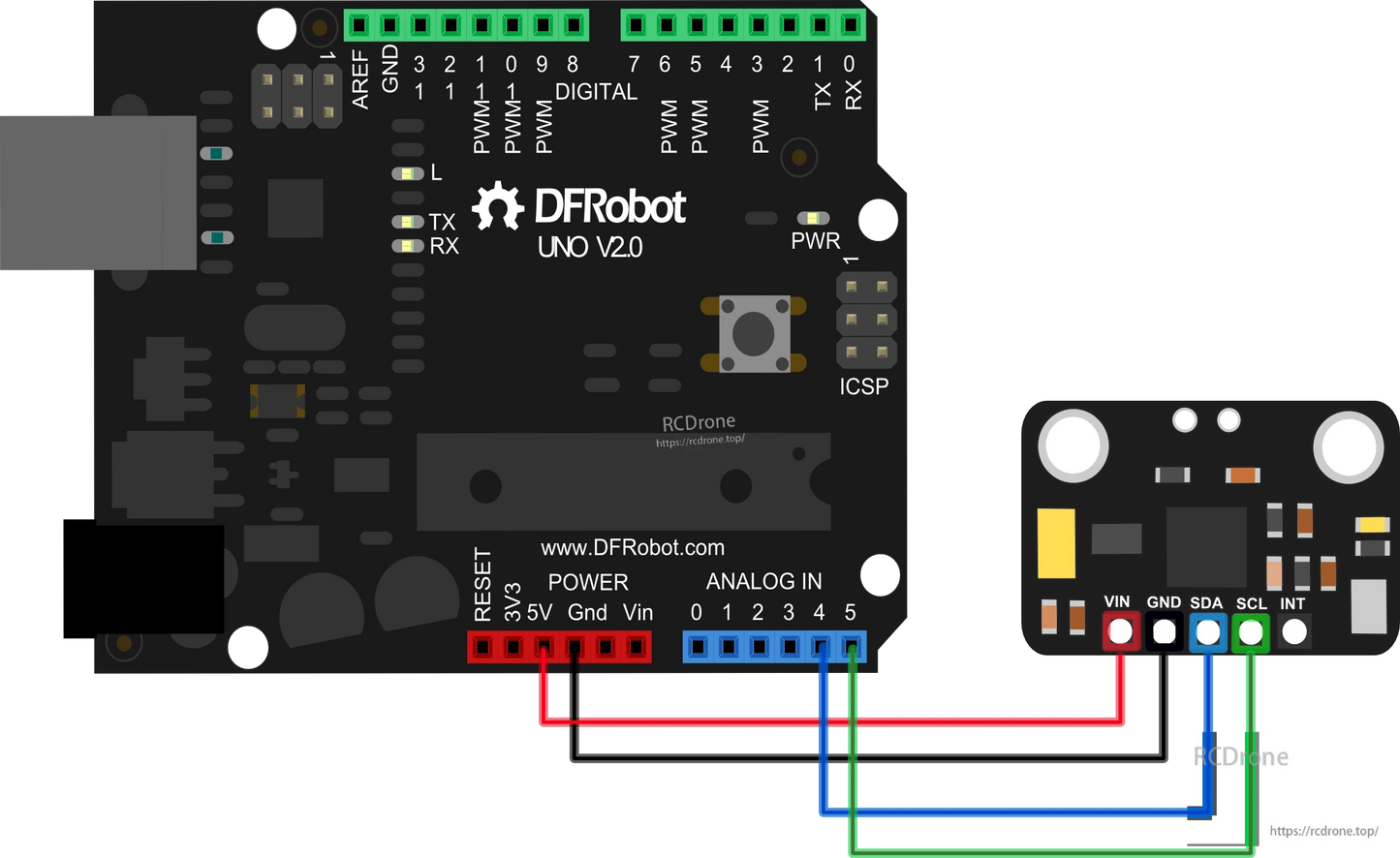
Модуль DFRobot SEN0142 MPU6050 6 DOF IMU интегрирует 3-осевой гироскоп и 3-осевой акселерометр на одном чипе, обеспечивая точное определение движения для робототехники, дронов, носимых устройств и проектов на Arduino. С Цифровым процессором движения (DMP) он поддерживает продвинутые алгоритмы MotionFusion на 6 и 9 осей, позволяя выводить кватернионы, углы Эйлера и необработанные данные сенсоров. С широким диапазоном входного напряжения 3V–5V MPU6050 может быть напрямую подключен к Arduino и другим микроконтроллерам для отслеживания движения в реальном времени и распознавания жестов.
Ключевые особенности
-
Сочетает в себе 3-осевой гироскоп и 3-осевой акселерометр в одном чипе
-
Программируемый диапазон акселерометра: ±2g, ±4g, ±8g, ±16g
-
Чувствительность гироскопа: ±250, ±500, ±1000, ±2000 dps
-
Цифровой процессор движения (DMP) для встроенного MotionFusion и распознавания жестов
-
I2C цифровой интерфейс поддерживает матричный, кватернионный, Эйлеров и сырые форматы данных
-
Встроенная калибровка &усилителя и компаса для повышения точности
-
Совместим с Arduino и носимой электроникой через I2Cdevlib
Спецификации
-
Рабочее напряжение: 3–5 V
Выход: I2C цифровые (данные MotionFusion 6/9-осей)
-
Акселерометр: программируемый диапазон ±2g / ±4g / ±8g / ±16g
-
Гироскоп: чувствительность ±250 / ±500 / ±1000 / ±2000 dps
-
Формат данных: матрица вращения, кватернион, углы Эйлера, сырые данные
-
Размеры: 14 × 21 мм
Применения
-
Датчики движения в робототехнике
-
Arduino &и проекты DIY в электронике
-
Взаимодействие человека с компьютером (HCI)
-
Носимые устройства и управление жестами
-
Навигационные и балансировочные системы (e.g., транспортные средства типа Segway)
-
Стабилизация дронов и отслеживание движения
Детали



Пример кода
Пожалуйста, сначала загрузите библиотеки для всех IMU сенсоров!




Изучите больше дронов и аксессуаров
-

Квадрокоптер с камерой
Наша коллекция камерных дронов включает широкий ассортимент брендов, таких как FIMI, JJRC,...
-

Дроновые аксессуары
Откройте для себя широкий ассортимент аксессуаров для дронов, чтобы улучшить летные характеристики,...



- Выбор выделенного элемента приводит к полному обновлению страницы.
- Открывается в новом окне.