ZED-F9P-01B-01 RTK GNSS-mottagarkort, USB-C, UART2 RTCM3, SMA & U.FL Antenn, Pixhawk GH1.25-6P
ZED-F9P-01B-01 RTK GNSS-mottagarkort, USB-C, UART2 RTCM3, SMA & U.FL Antenn, Pixhawk GH1.25-6P
RCDrone
Det gick inte att ladda hämtningstillgänglighet
Översikt
Denna GNSS-mottagarbräda är baserad på u-blox ZED-F9P-01B-01-modulen och erbjuder RTK-differentiell positioneringssupport med USB-C, UART/SPI-stift och alternativ för dubbla antennanslutningar för integration i robotik, autopilot och navigationssystem.
Nyckelfunktioner
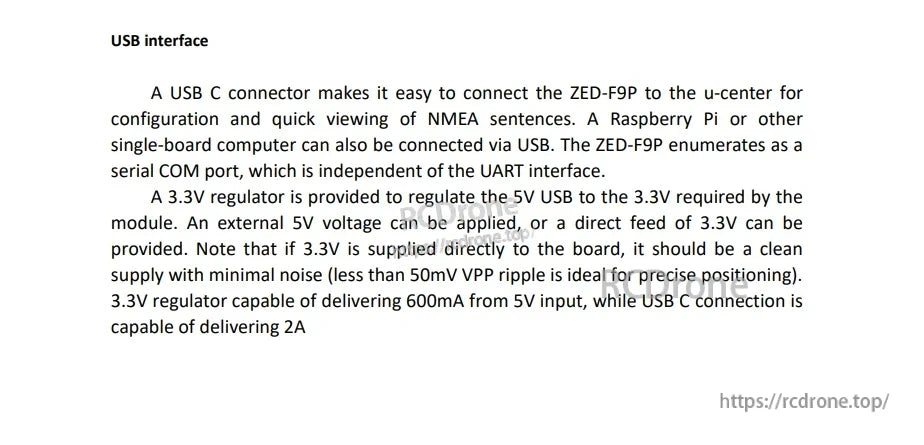
- USB-gränssnitt: USB Typ-C-anslutning för konfiguration med u-center och snabb visning av NMEA-meningar; listas som en seriell COM-port oberoende av UART-gränssnittet.
- Strömalternativ: Inbyggd 3.3V-regulator omvandlar 5V USB till 3.3V som modulen kräver; stöder extern 5V-ingång eller direkt 3.3V-matning.
- Lågbrus 3.3V-rekommendation: När 3.3V matas direkt rekommenderas en ren strömförsörjning med minimal brus (mindre än 50mV PVP-krusning anges som idealiskt för precis positionering).
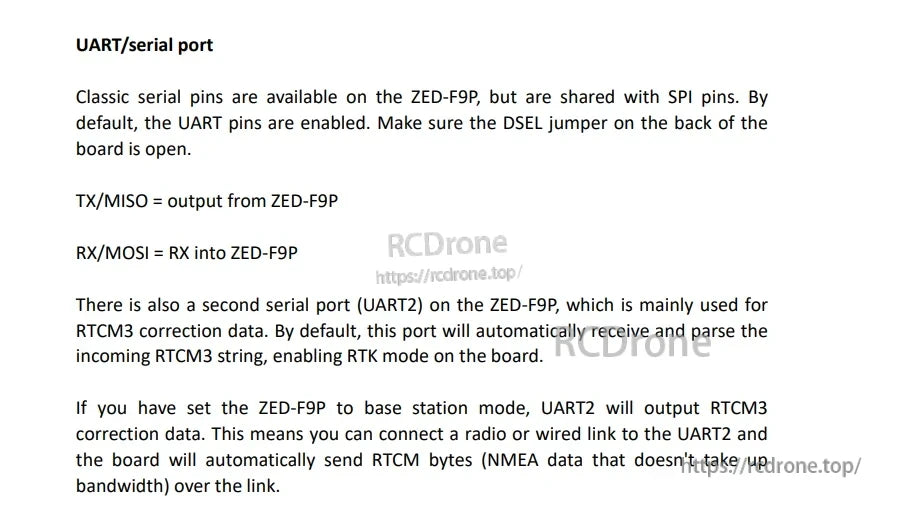
- UART/SPI-delning: Klassiska seriella stift är tillgängliga men delas med SPI-stift; som standard är UART-stift aktiverade.DSEL-jumpern på baksidan av kortet ska vara öppen.
- RTCM3-hantering på UART2: En andra seriell port (UART2) används huvudsakligen för RTCM3-korrigeringsdata; som standard tar den automatiskt emot och analyserar inkommande RTCM3 för att aktivera RTK-läget. I basstationläge ger UART2 ut RTCM3-korrigeringsdata.
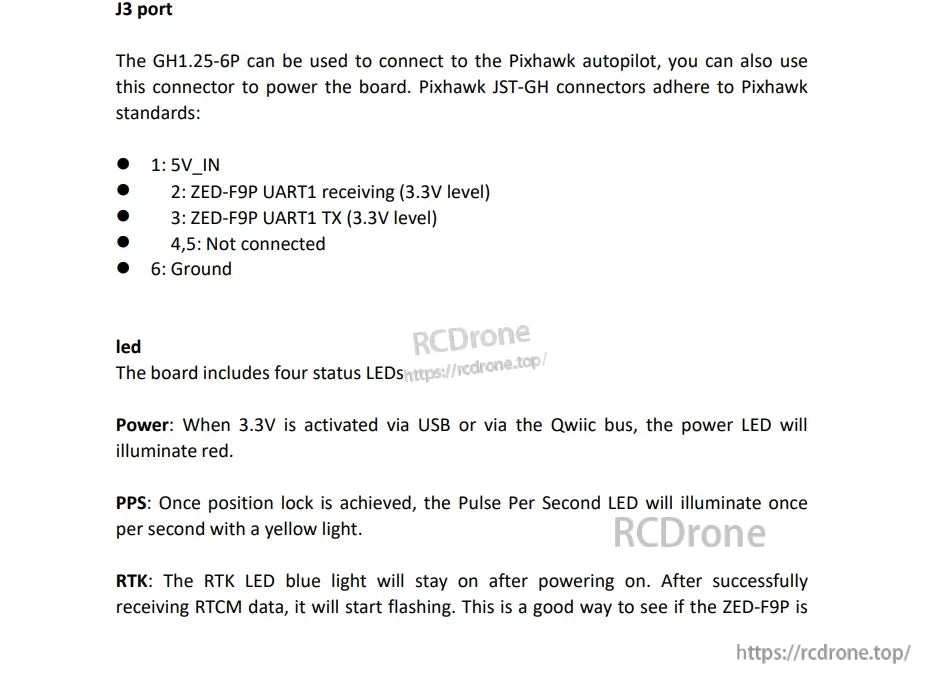
- Autopilotanslutning: GH1.25-6P (Pixhawk JST-GH-standard) för anslutning till en Pixhawk-autopilot och/eller för att strömförsörja kortet.
- Antennaanslutningar: Två antenninterface tillhandahålls: SMA (extern skruv, intern hål) och U.FL (IPEX); antingen kan användas.
- Status-LED:er: Fyra status-LED:er (Ström, PPS, RTK, FENCE) för system-/RTK-/geofencing-indikering.
Specifikationer
| GNSS-modul (modulens etikett) | u-blox ZED-F9P-01B-01 |
| Styrenhetens märkning (synlig på styrenhetsfoto) | ZED-F9P-01B-00 |
| USB | USB Typ-C; identifieras som seriell COM-port (oberoende av UART) |
| Seriell / SPI | UART-stift delade med SPI-stift; UART aktiverad som standard; DSEL-jumper på baksidan bör vara öppen |
| UART-stift riktning (delad med SPI) | TX/MISO = utgång från ZED-F9P; RX/MOSI = RX in i ZED-F9P |
| Andra seriella port | UART2 (främst för RTCM3 korrigeringsdata; kan skicka ut RTCM3 i basstationläge) |
| Strömreglering | 3.3V regulator tillhandahålls för att reglera 5V USB till 3.3V krävs av modulen |
| Strömingångsalternativ (angivna) | USB 5V, extern 5V, eller direkt 3.3V matning |
| 3.3V strömförsörjningsbrusnotering (angiven) | Mindre än 50mV PVP-rippel anges som idealiskt när man tillhandahåller 3.3V direkt |
| 3.3V regulator kapabilitet (angiven) | 600mA från 5V ingång |
| USB-C strömkapabilitet (angiven) | Kapabel att leverera 2A |
| J3-port | GH1.25-6P (Pixhawk JST-GH standard) |
| J3 pinout (Pixhawk standard) | 1: 5V_IN; 2: ZED-F9P UART1 mottagning (3.3V nivå); 3: ZED-F9P UART1 TX (3.3V nivå); 4,5: Inte anslutna; 6: Jord |
| LED-indikatorer (beskrivna) | Ström (röd när 3.3V aktiv via USB eller Qwiic-buss); PPS (gul, en gång per sekund efter positionslåsning); RTK (blå: på efter ström, blinkar efter att ha mottagit RTCM-data, stängs av efter RTK-fix); FENCE (konfigurerbar för geofencing-applikationer) |
| Antenna gränssnitt | SMA och U.FL (IPEX); antingen gränssnitt är acceptabelt |
| Headeretiketter (silkscreen, vänster sida) | GND, 3V3, SDA, SCL, FENCE, RTK, PPS, RST, SAFE, INT |
| Headeretiketter (silkscreen, höger sida) | GND, 5V, 3V3, TX2, RX2, CS, RX/MOSI, TX/MISO, SCK |
Applikationer
- RTK GNSS-positionering för drönare, UGV:er, robotik och navigationsprototyper
- Pixhawk/autopilot GNSS-integration via JST-GH (GH1.25-6P) seriell anslutning
- RTCM3-baserade RTK-installationer som använder UART2 för korrigeringsdata länkar (radio eller trådad)
För frågor om kompatibilitet (UART/SPI-val, RTCM3-kablar, antenner eller integration), kontakta support på https://rcdrone.top/ eller e-posta [email protected].
Detaljer

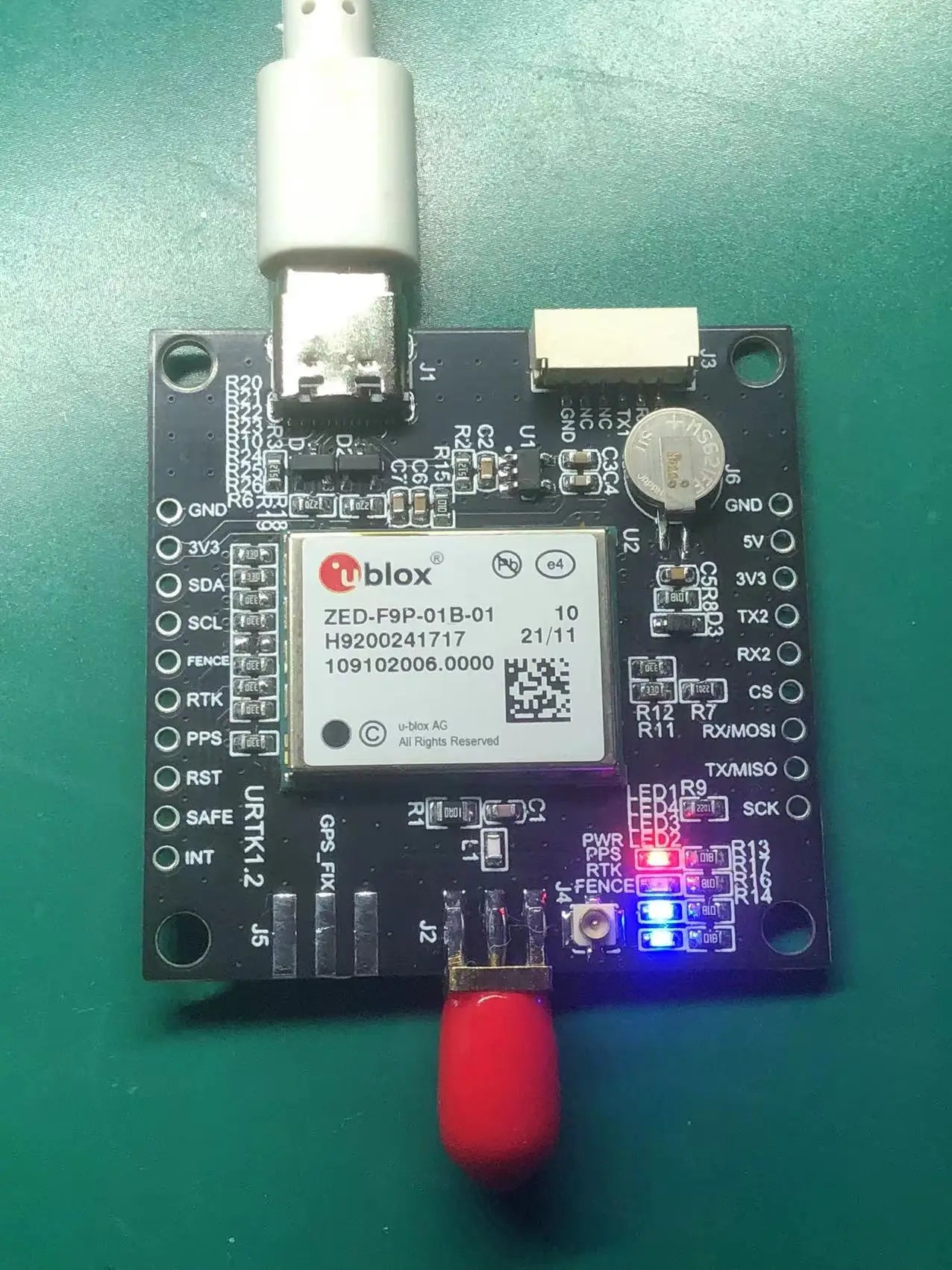
ZED-F9P mottagarens kort kombinerar en USB-C anslutning med tydligt märkta I/O-stift och en U.FL antennanslutning för enkel integration.
USB‑C-gränssnittet ansluter ZED‑F9P till u‑center eller en Raspberry Pi som en oberoende seriell COM-port, med inbyggd 3.3V-reglering från 5V USB-ström.
ZED-F9P-kortet använder delade UART/SPI-stift och en andra seriell port (UART2) som vanligtvis används för RTCM3-korrigeringsdata för att möjliggöra RTK-läge.
J3 GH1.25-6P Pixhawk kontaktstiftlistan listar 5V_IN, UART1 RX/TX (3.3V-nivå), och jord, och kortet använder fyra status-LED-lampor för ström, PPS-lås och RTK/RTCM-aktivitet.
ZED-F9P RTK GNSS-mottagarkortet erbjuder två antenninterface-alternativ—SMA och U.FL (IPEX)—för flexibel installation.
Related Collections