




CEREBOTO OpenArm 7DOF Robotarm Kit – Gör det själv eller förmonterad, öppen källkod ROS/Python-styrning
CEREBOTO OpenArm 7DOF Robotarm Kit – Gör det själv eller förmonterad, öppen källkod ROS/Python-styrning
CEREBOTO
Det gick inte att ladda hämtningstillgänglighet
Översikt
CEREBOTO OpenArm 7DOF Robotarm är en forskningsklass, människoskala robotarm designad för universitet, labb, startups och seriösa skapare. Med 7 frihetsgrader, 633 mm armräckvidd, typisk lastkapacitet på 4,1 kg och maximal lastkapacitet på 6,0 kg per arm, levererar OpenArm högprecisionsrörelse, säker fysisk interaktion och rika öppen källkodsverktyg.
Du kan välja ett DIY-hårdvarukit för fullständig praktisk montering, eller en fabriksjusterad, färdig att använda arm. Konfigurationer med en arm, två armar och fyra armar finns tillgängliga.
Nyckelfunktioner
-
7DOF människoskala robotarm – designad för att matcha en människas arm längd på 160–165 cm för naturlig manipulation och teleoperation.
-
Hög lastkapacitet &och stabilitet – typisk lastkapacitet 4,1 kg, maximal lastkapacitet 6,0 kg per arm, med en lätt vikt på 5,5 kg för armen.
-
Återdrivna motorer &och eftergivlig struktur – säker, smidig interaktion för samarbete mellan människa och robot samt kraftkontrollerade uppgifter.
-
1 kHz CAN-FD kontrollslinga – realtidskontroll med låg latens för högpresterande forskning och industriella tillämpningar.
-
Helmetallkonstruktion – robust huvudstruktur av aluminiumlegering och rostfritt stål för styvhet och hållbarhet.
-
Öppen källkod hårdvara &och mjukvara – öppen CAD, PCB, firmware och kontrollprogramvara för djup anpassning.
-
ROS, Python och C++ stöd – officiell ROS-integration plus Python/C++ API:er för snabb algoritmutveckling.
-
Rik ekosystem och expansion – stöder fingerfärdiga robotarmar, rörelsefångande handskar och mobila baser för kompletta robotplattformar.
Tekniska specifikationer
-
Frihetsgrader: 7 DOF per arm
-
Armräckvidd: 633 mm
-
Typisk last: 4.1 kg
-
Maximal last: 6.0 kg per arm
-
Armvikt: ca 5.5 kg per arm
-
Material: Aluminiumlegering och rostfria ståldelar
-
Kontrollgränssnitt: CAN / CAN-FD, UART (via medföljande USB2CANFD-X2-adapter på dual/quad-arm versioner)
-
Kontrollfrekvens: upp till 1 kHz CAN-FD-loop
-
Programvarustöd: ROS-ramverk, Python API, C++ API
-
Ergonomi: armens längd anpassad för användare med kroppshöjd 160–165 cm
Programvara &och öppen källkodsekosystem
OpenArm är en helt öppen källkodsrobotarmplattform.De officiella resurserna inkluderar:
-
Webbplats: openarm.dev
-
Dokumentation: docs.openarm.dev
-
GitHub: github.com/enactic/openarm
-
Instruktionsvideo: officiell YouTube-guide för att komma igång
Med öppna CAD-, PCB- och firmware-filer kan du modifiera mekanik, elektronik och styrprogramvara, eller utöka armen med nya sensorer och verktyg för dina egna forskningsämnen.
Typiska tillämpningsscenarier
OpenArm är utformad som en mångsidig, högprecisions forsknings- och undervisningsplattform för:
-
Universitetskurser i robotik och laboratorieexperiment
-
Forskningsinstitut och laboratorieprojekt
-
Förstärkningsinlärning och fysikbaserad AI-forskning
-
Människa-robotinteraktion och studier av samarbetsrobotar
-
Makerutrymmen och open-source hårdvaruteam
-
Ingenjörsutbildning och träningsplattformar
Med sin människoskala storlek och följsam aktivering är OpenArm idealisk för manipulation, teleoperation, imitationsinlärning, assistiv robotik och mer.
Produktversioner &och Konfigurationer
Version 1 – DIY Hårdvarukit
-
För användare med starka praktiska färdigheter som vill förstå den mekaniska strukturen på djupet.
-
Inkluderar alla mekaniska, elektriska och 3D-printade delar; du monterar och kalibrerar armen själv enligt manualen.
Version 2 – Färdig Robotic Arm
-
För forskningsinstitut, laboratorier, företag och utbildare som behöver en plug-and-play plattform.
-
Fullt monterad, justerad och kalibrerad innan leverans; redo att använda direkt ur lådan.
Tillgängliga armkonfigurationer (beroende på listning):
-
DIY Kit – Enkel Arm
-
Färdig Arm – Enkel Arm
-
DIY Kit – Dubbelarmar
-
Färdiga Armar – Dubbelarmar
-
DIY Kit – Fyrarmar
-
Färdiga Armar – Fyrarmar
Paketinnehåll
Varje OpenArm-kit eller färdigt system innehåller vanligtvis:
-
Aluminiumlegering och rostfria stålkonstruktionselement
-
Motorer, drivrutinskort, strömförsörjning och kablar
-
3D-utskrivna delar och skruvset
Dubbla armar och fyrarmade versioner: en officiell BOM-kompatibel USB2CANFD-X2 enhet (CEREBOTO är den auktoriserade inhemska agenten) för PC-till-CAN-FD kommunikation.
Stödda hårdvaru-tillägg
OpenArm stöder flera hårdvaru-tillägg (säljs separat), vilket gör att du kan bygga ett komplett robotiskt system:
-
Dexterös robothand – för fin manipulation och greppforskning.
-
Rörelsefångande handskuppsättning – för intuitiv teleoperation och imitationsinlärning.
-
Mobil bas – för att förvandla OpenArm till en mobil manipulatorplattform.
FAQ
Q: Kan den robotiska armen användas omedelbart?
A: Den färdiga armversionen är helt justerad och kalibrerad på fabriken—bara sätt på strömmen och börja arbeta. DIY-hårdvarukitet kräver att du monterar och ställer in systemet enligt instruktionerna.
Q: Är OpenArm kompatibel med ROS eller annan mjukvaruplattform?
A: Ja. OpenArm stöder officiellt ROS-ramverket, och du kan också styra armen via Python- och C++-API:er.
Q: Vem är denna produkt för?
A: Forskare vid universitet och institut, AI & robotiklab, undervisningskurser, ingenjörsutbildningscenter och avancerade hobbyister.
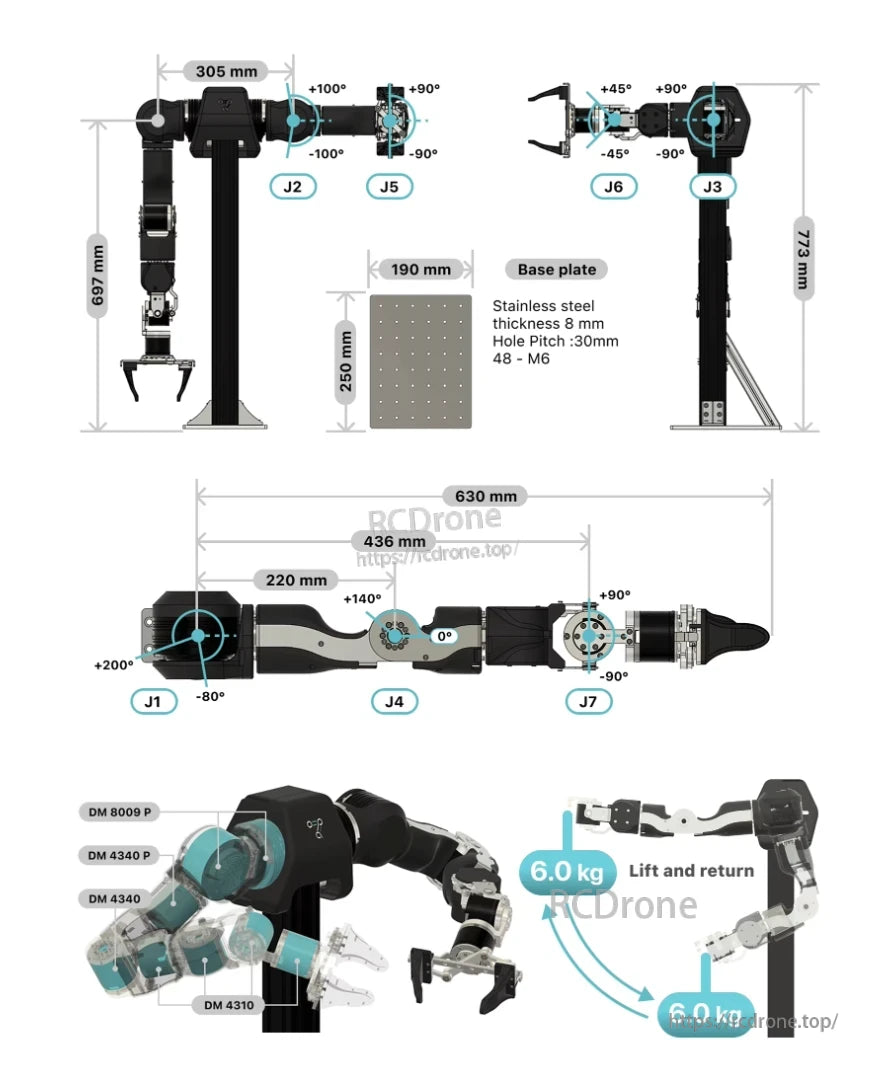
Cereboto OpenArm 7DOF Robotarm har sju leder (J1–J7) med definierade vinkelområden. Den är 697 mm eller 773 mm hög, når 630 mm och monteras på en 190×250 mm rostfri stålplatta—8 mm tjock med 48 M6-hål med 30 mm mellanrum. Drivs av DM8009P, DM4340P, DM4340 och DM4310 motorer, hanterar den 6,0 kg laster med precision. Designad för industriellt och forskningsbruk, balanserar den strukturell robusthet med noggrann rörelsekontroll.

Related Collections



