






CUAV Pixhawk V6X V2 drönarkontroller för PX4 ArduPilot, STM32H753IIK6, RM3100, 100Mbps Ethernet
CUAV Pixhawk V6X V2 drönarkontroller för PX4 ArduPilot, STM32H753IIK6, RM3100, 100Mbps Ethernet
CUAV
Det gick inte att ladda hämtningstillgänglighet
Översikt
CUAV Pixhawk V6X V2 är en Pixhawk-serie dronkontroller designad för PX4 och ArduPilot autopilot firmware. Den följer Pixhawk FMU v6x-standarden och modulär designfilosofi, med uppgraderad industriell redundant sensorik, en konstant temperatur extern klocka och MCU värmeavledningsdesign, 5V/3.3V PWM nivåomkoppling och en patenterad stötdämpningsstruktur. Den standard PMU 2 Lite strömhanteringsmodulen stöder 70V ingång och 220A strömavkänning.
Nyckelfunktioner
- H7 dubbelprecision flyttal enhet (STM32H753IIK6); 480MHz dubbelprecision flyttal enhet; 2M Flash-minne
- Industriell klass olikartad trippelredundant IMU-matris med oberoende buss och strömförsörjningsdesign (IIM-42652, BMI088, ICM-45686)
- Kombinerad dubbelredundant barometer (BMP581, ICP-20100)
- Kärnans stötdämpningssystem med tre axlar (X, Y, Z) stötdämpning; lutad fyrhörnsstöddesign; ny typ av stötdämpande material
- Biltillverkningsklass RM3100 magnetkompass för robust avvisning av magnetisk störning
- IMU extern kristallklockkompensation (används med högprecisions konstanttemperatur extern klocka för att minska ODR-fel och förbättra känslighet och synkronisering)
- Konstant temperaturkontrollsystem: termisk ledande silikon och IMU temperaturkompensation för att minska temperaturrelaterad drift
- Flexibel programvaruomkoppling mellan 5V och 3.3V PWM-utgångsnivåer
- Integrerad 100 Mbps Ethernet-gränssnitt för hög hastighet data synkronisering med enheter som uppdragsdatorer och mätkameror
- Stöder säker start och säkra firmwareuppdateringstjänster
- Multiredundant strömförsörjningsdesign; stöder 2-kanals CAN PMU-ingång; inkluderar PMU 2 Lite som standard
- Bottenmonteringshål tillagda för direkt skruvmontering; monteringshål kompatibla med M2-standard skruvar
Specifikationer
| Processor | STM32H753IIK6 |
| Coprocessor | STM32F103 |
| Version | Pixhawk V6XV2 |
| CPU / minne (angivet) | 480MHz dubbel precision flyttal enhet; 2M Flash-minne |
| Accelerometer & gyroskop | IIM-42652; BMI088; ICM-45686 |
| Kompass | RM3100 |
| Barometer | BMP581; ICP-20100 |
| PWM I/O | 16 |
| PWM-nivå | 3.3V / 5V (programvarubrytning) |
| Ström | 2 (2 CAN ströminterfaces) |
| GPS-port | 2 (GPS1: GPS-interface med I2C och säkerhetsbrytare; GPS2: interface med I2C och GPS) |
| TELEM-port | 3 |
| CAN-buss | 2 |
| PPM RC | 1 (dedikerad ingång för PPM-mottagare) |
| SBUS/DSM/RSSI | 2 (1 SBUS/DSM/Spektrum-ingång; 1 analog 3.3V/PWM-ingång) |
| SBUS-utgångar | 1 |
| FMU-debug | 1 |
| IO-debug | 1 |
| Ethernet | 1 (100 Mbps) |
| SPI extern 1 | 1 (SP16-gränssnitt för extern sensorutvidgning) |
| ADIO | 1 (AD3.3/ADC6.6) |
| UART4 | 1 |
| USB-port | 2 (Typ-C x1; GH-gränssnitt x1 för USB extern anslutning) |
| TF-kort | 1 |
| Strömmodul | Standard PMU 2 Lite (5V-version), ingångsspänning: 12-70V |
| Driftspänning | USB: 4.75-5.25V; PMU 2 Lite: 12-70V; Effekt: 4.85-5.45V |
| Driftstemperatur | -20 till 85C |
| Storlek | 45 x 85.1 x 29.2 mm |
| Vikt | Kontroller: 97.9g; Kärna: 43.1g; Bärkort (inklusive skruvar): 54.8g |
| Monteringsnotering (diagramtext) | Monteringshål kompatibla med M2 standard skruvar; dimensioner som visas: 72 mm; 22.50 mm; 24 mm |
Vad som ingår
- Pixhawk V6X V2 x1
- CAN PMU 2 Lite 5V Strömmodul x1
- PMU 2 Lite-5V Header Strömkabel (X7+ (V6X) Version), kabellängd: 25cm x1
- CAN/I2C Förlängningskort x1
- TF Minneskort x1
- Typ-C Kabel, kabellängd: 100cm x1
- DSM RC Kabel, kabellängd: 30cm x1
- SBUS RC Kabel, kabellängd: 30cm x1
- PPM RC/SBUS UT Kabel, kabellängd: 30cm x1
- Ethernet Kabel, kabellängd: 40cm x1
- CAN Kabel, kabellängd: 30cm x1
- TELEM Kabel, kabellängd: 30cm x1
- UART 4 Kabel, kabellängd: 30cm x1
- UART4 -> I2C Kabel, kabellängd: 30cm x1
- ADIO Kabel, kabellängd: 30cm x1
- Debug Kabel, kabellängd: 10cm x1
- USB -> Typ-C Honkontakt Förlängningskabel, kabellängd: 50cm x1
- 3M Dubbel-Sidig x2
Tillämpningar
- Kompatibel med ArduPilot och PX4
- Stöder multi-rotor, fastvinge, VTOL fastvinge, obemannad helikopter, obemannade fordon och obemannade fartyg (ubåtar)
- Hög hastighet Ethernet datasykronisering med uppdragsdatorer och andra ombord enheter där det stöds
För kompatibilitetskontroller och installationsfrågor, kontakta [email protected] eller besök https://rcdrone.top/.
Video
Detaljer

Pixhawk V6X V2 flygkontroller använder en H7-processor och har en trippel-redundant IMU, dubbel barometer och RM3100-kompass med en stötdämpande design.

Pixhawk V6X V2 använder en STM32H753IIK6 H7-processor för att stödja PX4 och ArduPilot-baserade flygkontrollsystem.

Pixhawk V6X V2 använder en treaxlig (X, Y, Z) stötdämpande monteringsanordning med fyra lutande hörnstöd för att hjälpa till att minska vibrationer och ljud.
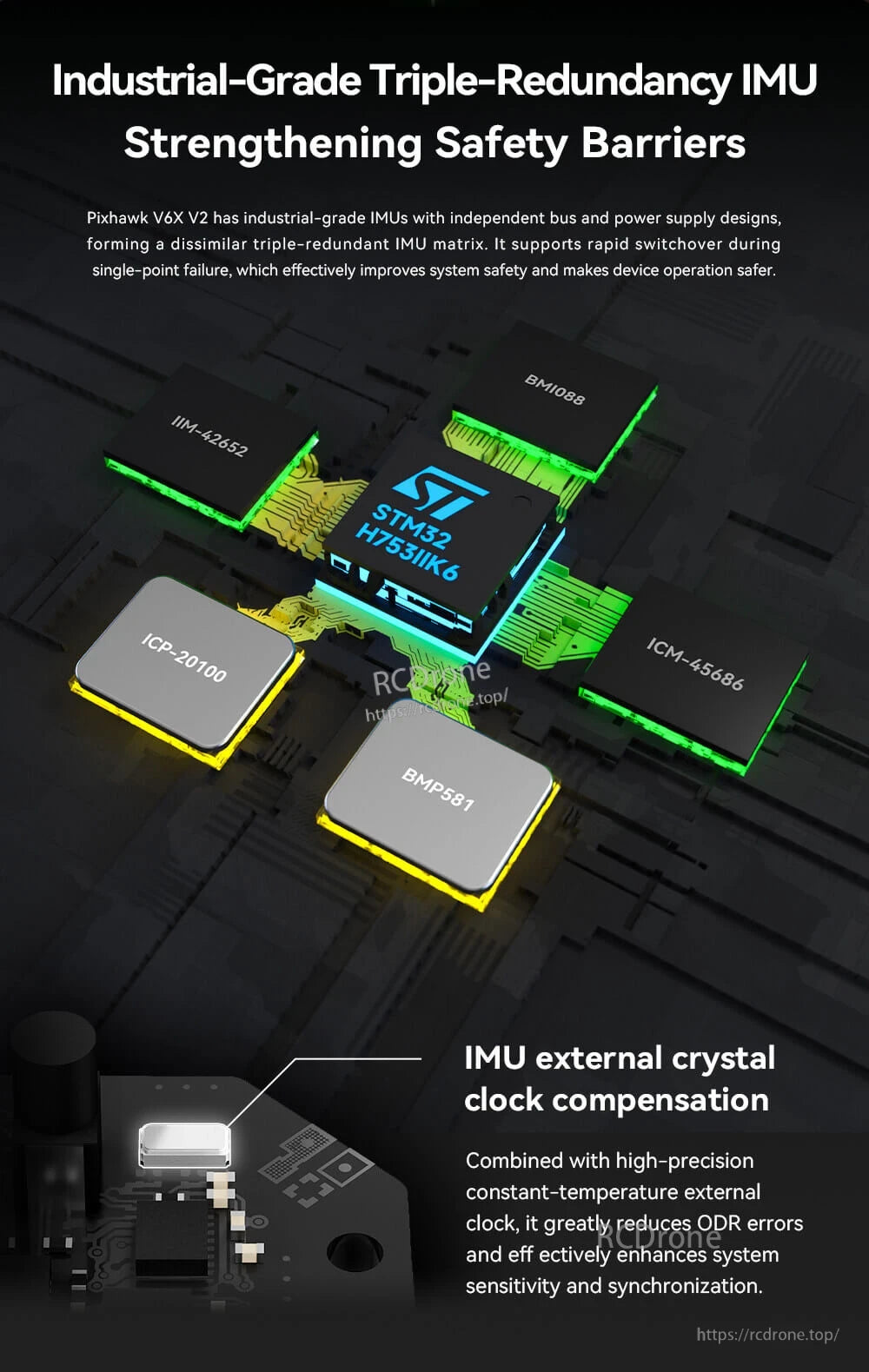
Pixhawk V6X V2 flygkontroller design har en trippel-redundant IMU-uppsättning runt STM32H753IIK6, plus extern kristallklockkompensation för sensortiming.

Pixhawk V6X V2 integrerar en bilstandard RM3100 magnetometer och stöder GPS-riktningsbestämning för mer stabil orientering och navigering.
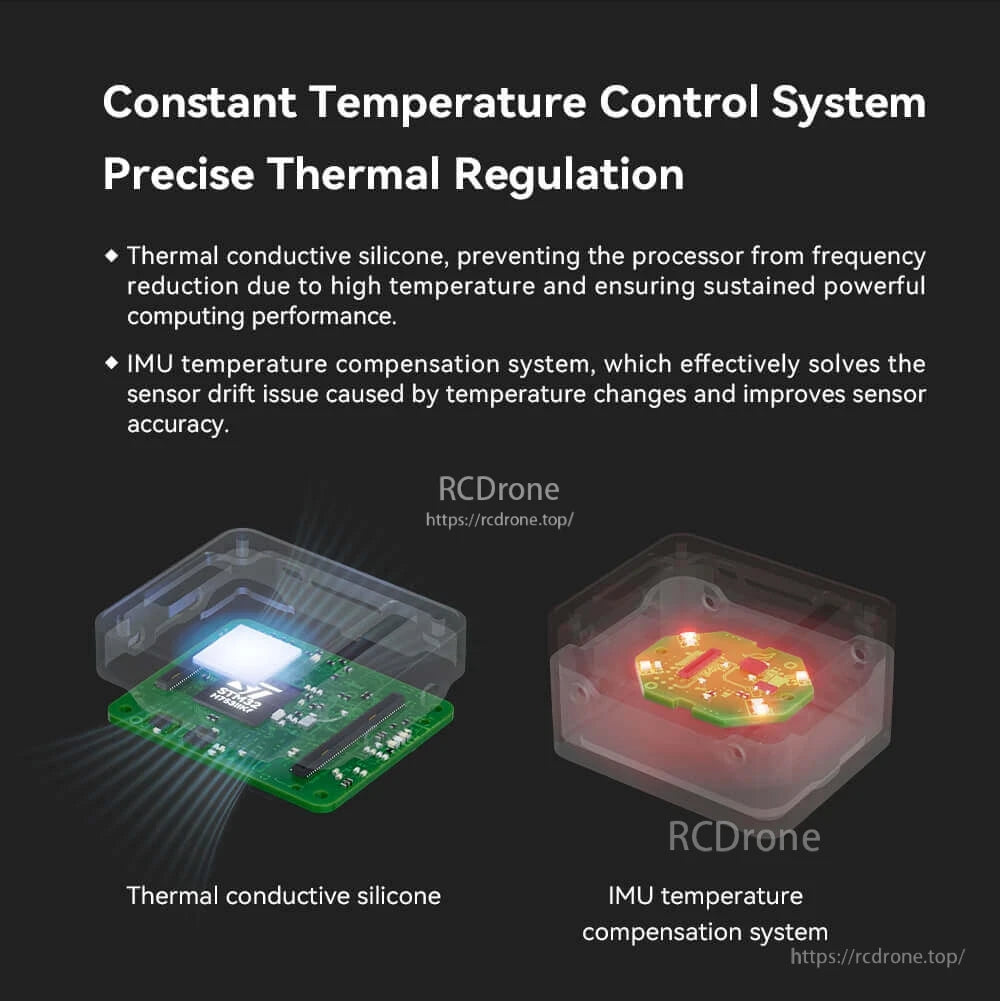
En konstant temperaturkontrollsystem använder termisk ledande silikon och IMU temperaturkompensation för att minska temperaturrelaterad drift.
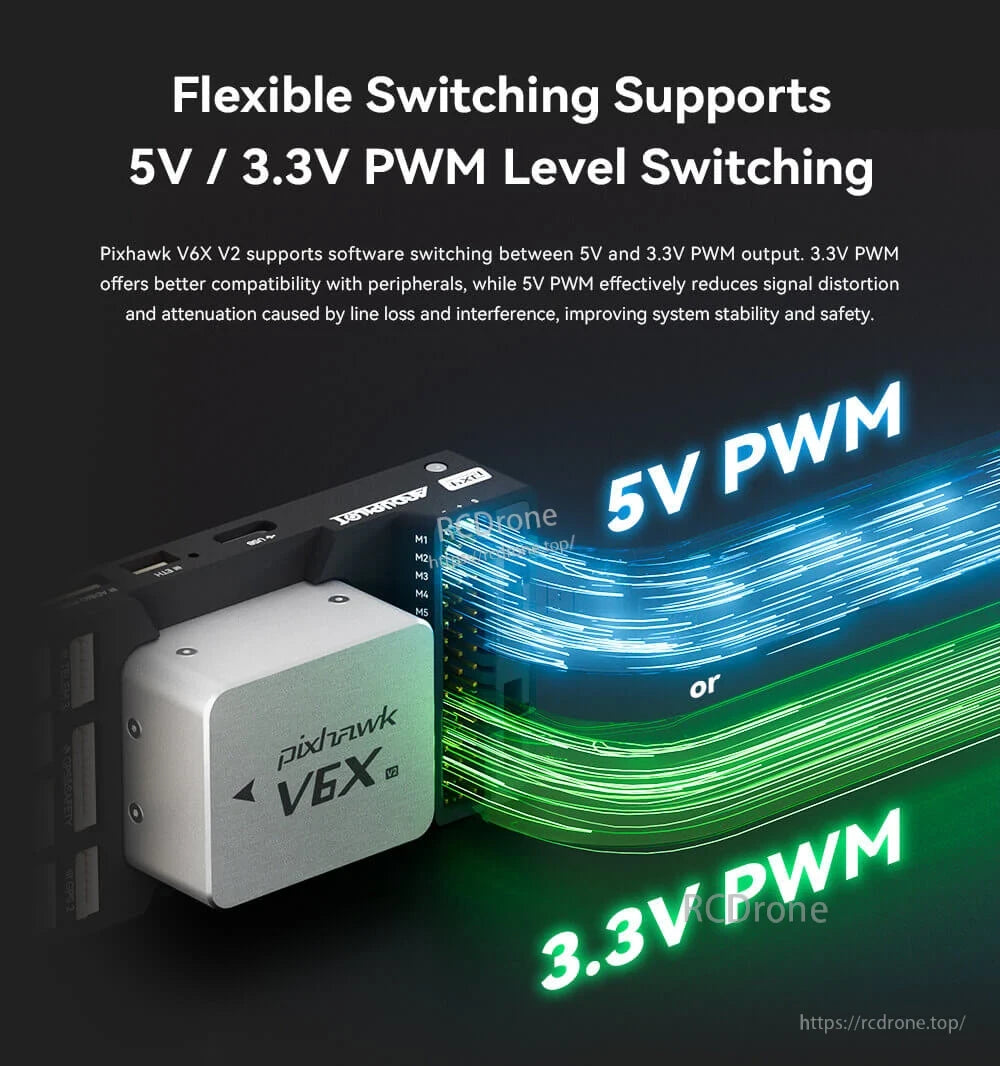
Pixhawk V6X V2 stöder flexibel växling mellan 5V och 3.3V PWM-utgångsnivåer för enklare kompatibilitet med olika perifera enheter.

Pixhawk V6X V2 integrerar ett 100 Mbps Ethernet-gränssnitt tillsammans med märkta portar som USB, TELEM3, CAN och GPS & Säkerhet för ren kablage.
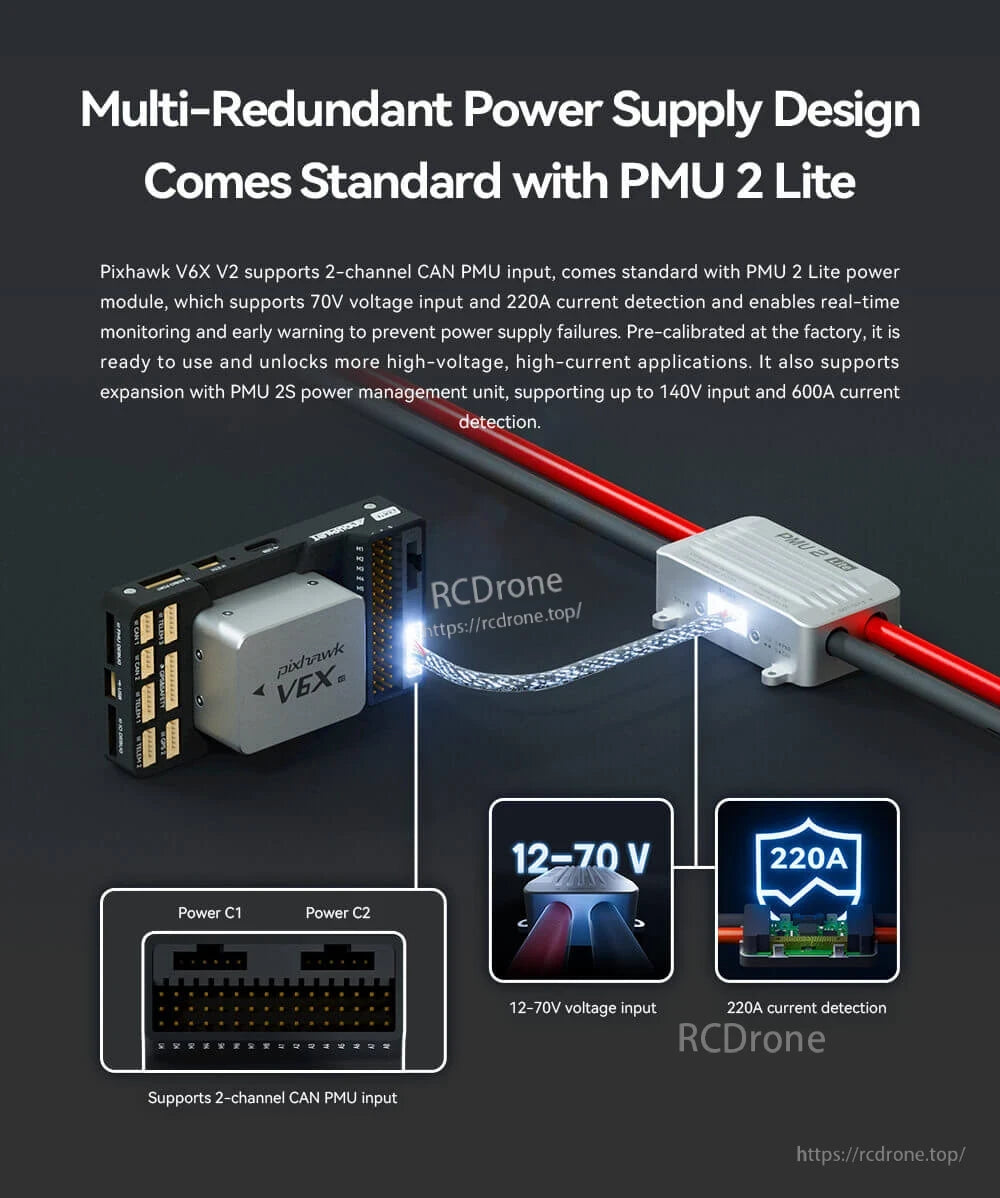
Pixhawk V6X V2 kopplas ihop med PMU 2 Lite-modulen för flerfaldig redundant strömförsörjning, som stöder 12–70V och 220A strömavkänning.

CUAV Pixhawk V6X V2 använder en modulär, avtagbar kärnmodul på en bärkort för att förenkla anpassning och åtkomst till kontakter.
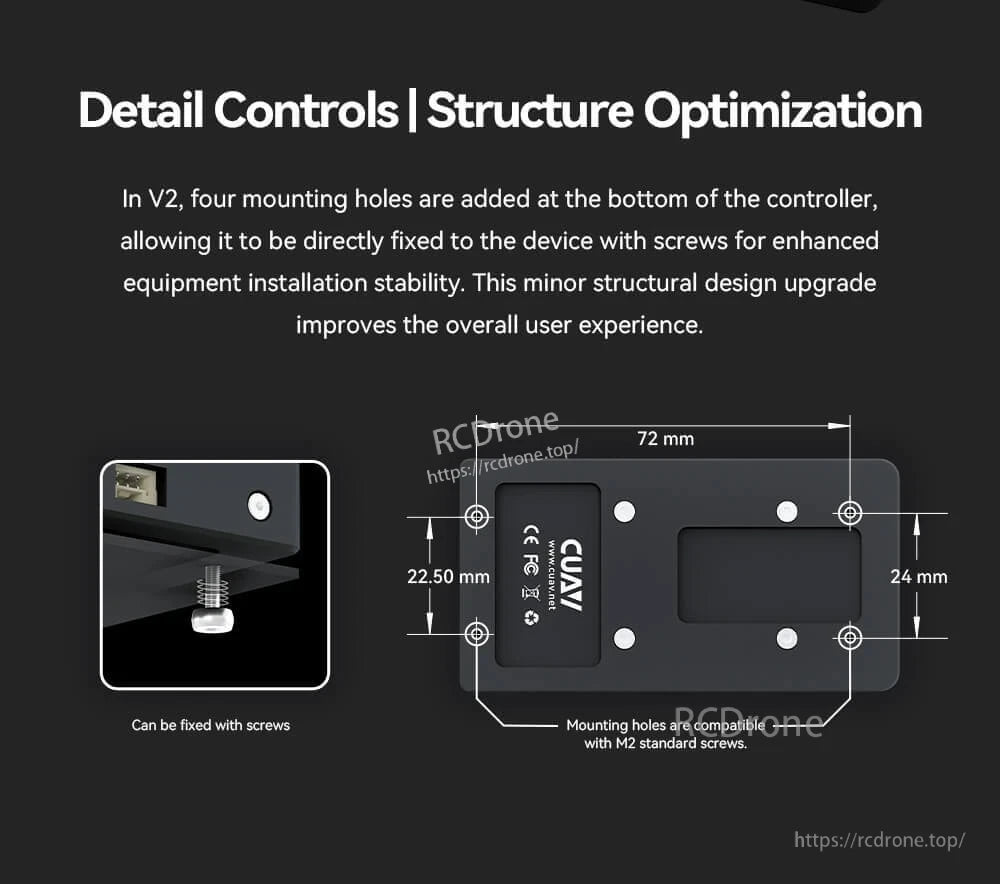
CUAV Pixhawk V6X V2 lägger till fyra M2-kompatibla monteringshål på botten med en fotavtryck på 72 mm för en säkrare skruvinstallation.

Pixhawk V6X V2 stöder ArduPilot och PX4 firmware för en rad obemannade plattformar inklusive multirotorer, fasta vingar och mark- eller marinfordon.
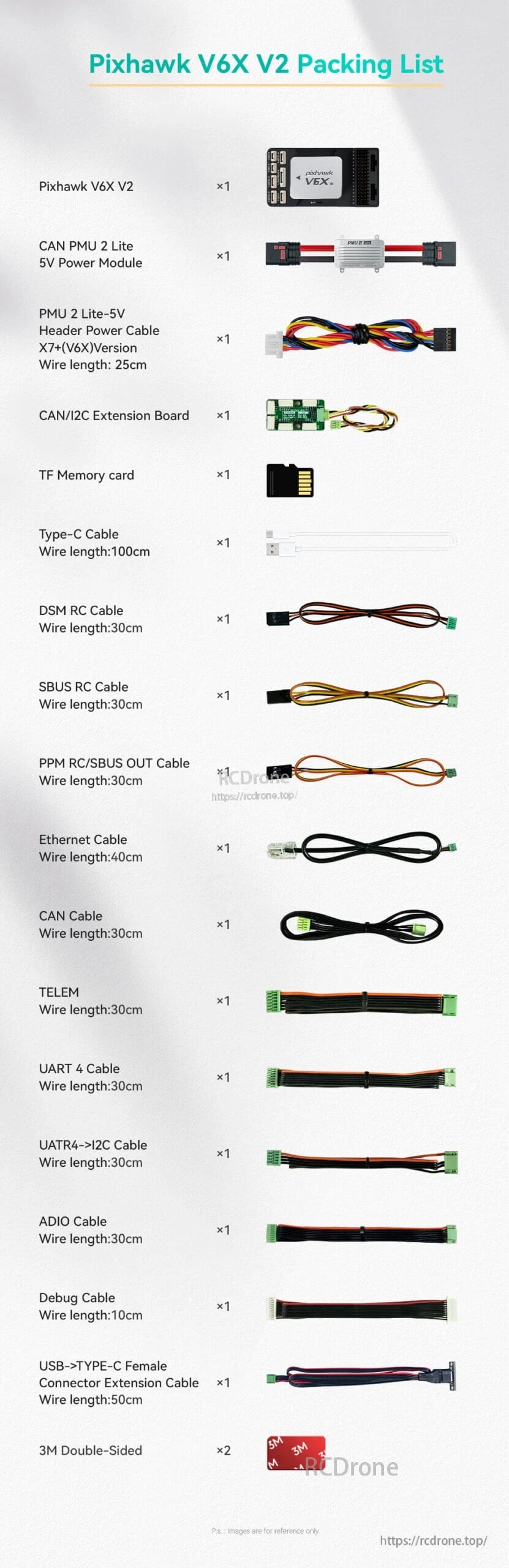
Pixhawk V6X V2-kitet inkluderar flygkontrollen, CAN PMU 2 Lite 5V strömmodul, TF-minneskort och en uppsättning av Type‑C, RC, Ethernet, CAN, TELEM, UART, ADIO och debug-kablar.
Related Collections


















