






CubeMars AK10-9 V2.0 Robotaktuator KV60/KV100 | 18Nm/15Nm Märkt Vridmoment, Dubbel Encoder, MIT- & Servolägen
CubeMars AK10-9 V2.0 Robotaktuator KV60/KV100 | 18Nm/15Nm Märkt Vridmoment, Dubbel Encoder, MIT- & Servolägen
CubeMars
Det gick inte att ladda hämtningstillgänglighet
Översikt
CubeMars AK10-9 V2.0 är en högintegrerad robotaktuator som kombinerar en högpresterande BLDC-motor, planetväxel, dubbla encoders och integrerad drivrutin i en kompakt enhet. Den stöder både MIT kraftläge och industriellt servostyrningsläge, och levererar smidig vridmomentutgång, noggrann positionering och snabb respons, vilket gör den idealisk för benrobotar, exoskelett och AGV:er. Finns i KV60 och KV100 varianter, erbjuder den upp till 48Nm toppvridmoment, med optimerad värmeavledning och real-tids temperaturövervakning för långsiktig tillförlitlighet.
Nyckelfunktioner
-
Dubbla kontrolllägen: Stöder sömlös växling mellan MIT kraftläge och servostyrningsläge för flexibel rörelsekontroll.
-
Hög vridmomentutgång: Upp till 48Nm toppvridmoment med stabil drift och låg backlash (0,33°).
-
Högt integrerad: Kombinerar motor, encoder, drivrutin och planetväxel i en kompakt form.
-
Utgång & Inre encoders: Integrerade 14-bitars inre och 15-bitars yttre magnetiska encoders säkerställer noggrann återkoppling.
-
Korsade rullager: Förbättrar axial och radial belastningsmotstånd, vilket ökar tillförlitligheten i dynamiska tillämpningar.
-
Temperatursensor inuti: Realtidsövervakning av temperatur förhindrar motorskador under termisk stress.
-
Optimerad värmeavledning: Unik strukturdesign förbättrar termisk hantering, vilket säkerställer stabil långsiktig drift.
-
Tyst drift: Ljudnivå så låg som 65 dB vid 65 cm (KV60-versionen).
Specifikationer
AK10-9 V2.0 K60 Specifikationer
| Tillämpning | Benrobot, Exoskelett, AGV | Spetsmoment (Nm) | 48 |
| Drivmetod | FOC | Spetsström (ADC) | 29.8 |
| Driftens omgivningstemperatur | -20℃~50℃ | Kv (rpm/V) | 60 |
| Vindningstyp | stjärna | Kt (Nm/A) | 0.198 |
| Isolationsklass | C | Ke (V/krpm) | 17.2 |
| Isolering Högspänning | 1000V 5mA/2s | Fas till Fas motstånd (mΩ) | 195 |
| Isoleringsmotstånd | 1000V 10MΩ | Fas till Fas induktans (μH) | 181 |
| Fas | 3 | Tröghet (gcm²) | 1002 |
| Polpar | 21 | Km (Nm/√W) | 0.45 |
| Reduceringsförhållande | 9:1 | Mechanisk tidskonstant (ms) | 0.5 |
| Backdrivning (Nm) | 0.8 | Elektrisk tidskonstant (ms) | 0.93 |
| Backlash (°) | 0.33 | Vikt (g) | 960 |
| Temperatursensor | NTC MF51B 103F3950 | Maximalt vridmoment viktförhållande (Nm/kg) | 50 |
| Bullernivå dB 65CM från motorn | 65 | CAN-kontakt | A1257WR-S-4P |
| Grundlastbetyg (dyn. C ) N | 2000 | UART-kontakt | A1257WR-S-3P |
| Grundläggande belastningsklassificeringar (stat.C0) N | 2520 | Strömkontakt | XT30PW-M |
| Nominell spänning (V) | 24/48 | Inre slinga encoder typ | Magnetisk encoder |
| Nominellt vridmoment (Nm) | 18 | Inre ring encoder upplösning | 14bit |
| Nominell hastighet (rpm) | 109/228 | Yttre ring encoder typ | Magnetisk encoder |
| Nominell ström (ADC) | 10.6 | Yttre ring encoder upplösning | 15bit |
AK10-9 V2.0 KV100 Specifikationer
| Tillämpning | Benrobot, Exoskelett, AGV | Spetsmoment (Nm) | 38 |
| Drivmetod | FOC | Spetsström (ADC) | 41.2 |
| Driftens omgivningstemperatur | -20℃~50℃ | Kv (rpm/V) | 100 |
| Vindningstyp | Delta | Kt (Nm/A) | 0.114 |
| Isolationsklass | C | Ke (V/krpm) | 9.9 |
| Isolering Högspänning | 1000V 5mA/2s | Fas till Fas motstånd (mΩ) | 65.5 |
| Isolationsmotstånd | 1000V10MΩ | Fas till fas induktans (μH) | 60 |
| Fas | 3 | Tröghet (gcm²) | 1002 |
| Polpar | 21 | Km (Nm/√W) | 0.45 |
| Reduceringsförhållande | 9:1 | Mechanisk tidskonstant (ms) | 0.51 |
| Backdrivning (Nm) | 0.8 | Elektrisk tidskonstant (ms) | 0.92 |
| Backlash (°) | 0.33 | Vikt (g) | 960 |
| Temperatursensor | NTC MF51B 103F3950 | Maximalt vridmoment viktförhållande (Nm/kg) | 39.6 |
| Bullernivå dB 65CM från motorn | 70 | CAN-kontakt | A1257WR-S-4P |
| Grundlastbetyg (dyn. C) N | 2000 | UART-kontakt | A1257WR-S-3P |
| Grundlastbetyg (stat.C0) N | 2520 | Strömkontakt | XT30PW-M |
| Nominell spänning (V) | 24/48 | Inre slinga encoder typ | Magnetisk encoder |
| Nominellt vridmoment (Nm) | 15 | Inre ring encoder upplösning | 14bit |
| Nominell hastighet (rpm) | 205/421 | Yttre ring encoder typ | Magnetisk encoder |
| Nominell ström (ADC) | 16.2 | Yttre ringens upplösning för encoder | 15bit |
| Antal encoders | 2 |
Applikationer
-
Bioniska benrobotar
-
Exoskelett för rehabilitering eller belastning
-
Autonoma markfordon (AGV)
-
Gemensamma vridmomentkontrollsystem
-
Humanoida och fyrbenta robotar
Nedladdningar
![]() AK Series Driver and Control Manual v1.0.15.X.pdf
AK Series Driver and Control Manual v1.0.15.X.pdf
Detaljer
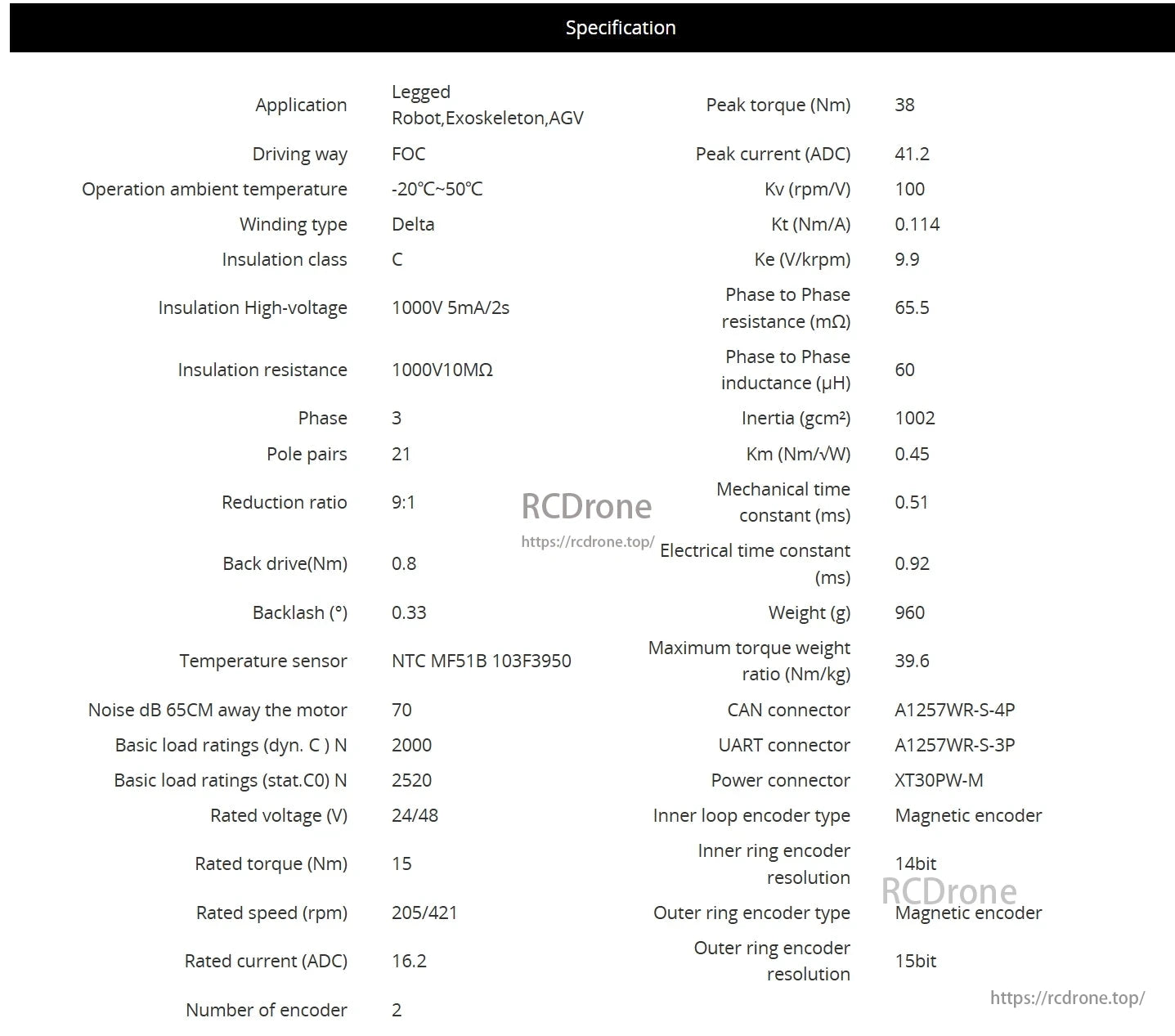
CubeMars AK10 robotaktuator: 38 Nm toppvridmoment, 41.2 ADC spänningsström, -20°C till 50°C drift, 9:1 reduktionsförhållande, 960g vikt, 39.6 Nm/kg max vridmoment-viktförhållande, 70 dB ljud, magnetiska encoders, CAN och UART kontakter.

CubeMars AK10 Robotaktuator: 48 Nm max vridmoment, 29.8 A spänningsström, -20°C till 50°C drift, 1000V isolering, 3 faser, 21 polpar, 9:1 reduktionsförhållande, 960g vikt, 50 Nm/kg max vridmoment-viktförhållande, magnetiska encoders.

Analysdiagram för CubeMars AK10-9 V2.0 KV60@48VDC actuaktuator. Visar utgångseffekt (W), effektivitet, ström (A) och hastighet (RPM) mot vridmoment (N.m). Effektiviteten når sin topp runt 12 N.m, medan utgångseffekten ökar stadigt med vridmomentet. Strömmen stiger linjärt, och hastigheten minskar när vridmomentet ökar. Diagrammet framhäver aktuatorns prestandakarakteristika och visar dess kapabilitet under varierande belastningar.Nyckeltal inkluderar maximal uteffekt som överstiger 800 W och driftshastighet upp till 350 RPM vid låga vridmoment. Dessa data hjälper till att förstå aktuatorns effektivitet och kraftdynamik över olika tillämpningar.
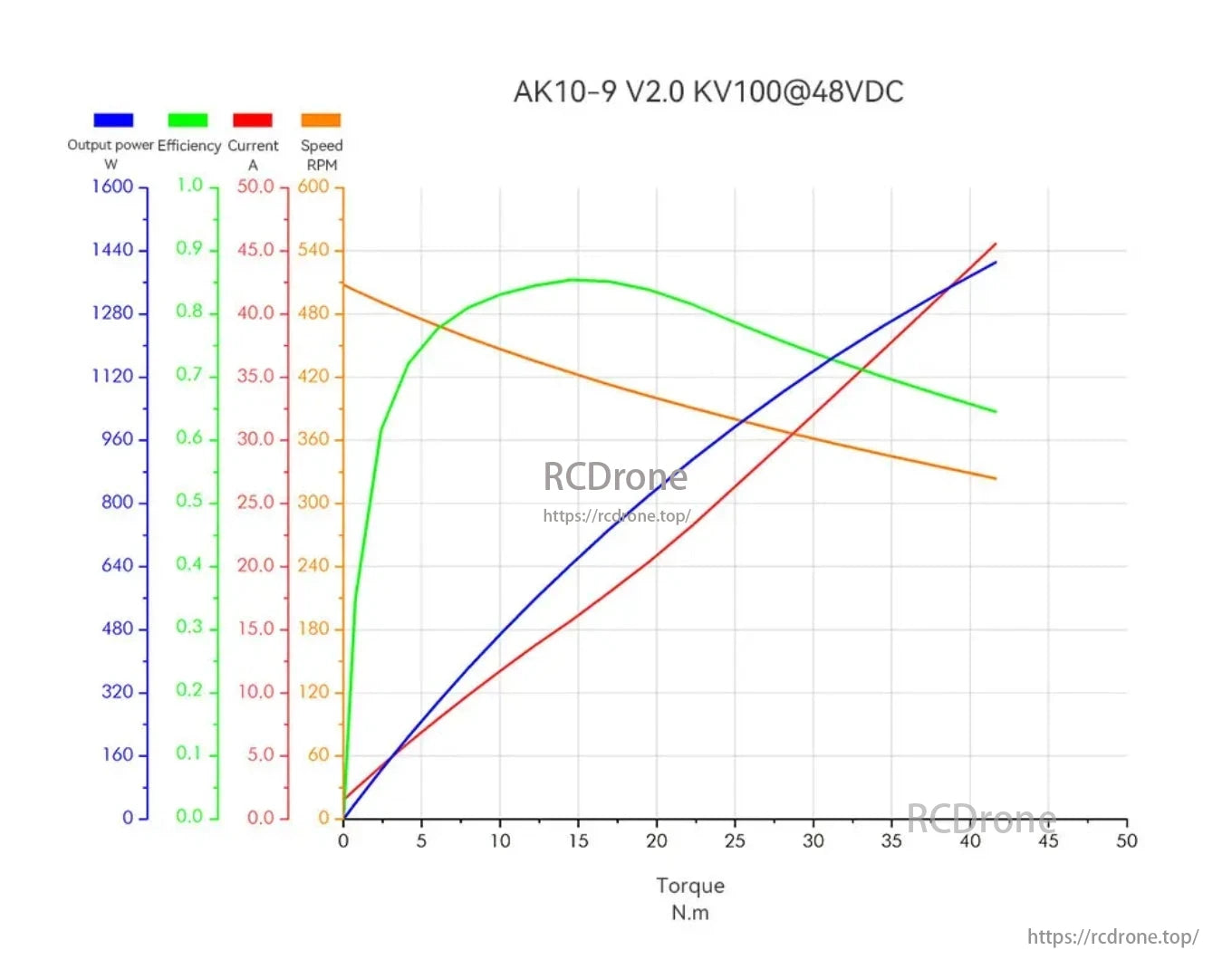
CubeMars AK10-9 V2.0 KV100@48VDC actuatorprestanda avbildas. Uteffekt (W), effektivitet, ström (A) och hastighet (RPM) plottas mot vridmoment (N.m). Effektiviteten når sin topp runt 15 N.m, medan uteffekten ökar linjärt med vridmomentet. Strömmen ökar också stadigt med vridmomentet. Hastigheten minskar när vridmomentet ökar, med start vid cirka 480 RPM vid noll vridmoment. Grafen illustrerar optimala driftpunkter för olika tillämpningar och framhäver aktuatorns kapabiliteter under olika belastningsförhållanden. Dessa data hjälper till att välja lämpliga inställningar för specifika uppgifter.

CubeMars AK10-9 KV60 integrerad kraftservo, lägen inkluderade. Robotaktuator med FCC, CE, RoHS V2.0 certifiering.

Robotic Actuator erbjuder effektiv motorstyrning, noggrann effektläge och snabbare respons för industriella tillämpningar.

CubeMars AK10 Robotic Actuator inkluderar en högpresterande BLDC-motor, industriklassad korsrullager, temperatursensor, utgångsencoder, dubbel kontrolläge och planetväxel för stabilt vridmoment.

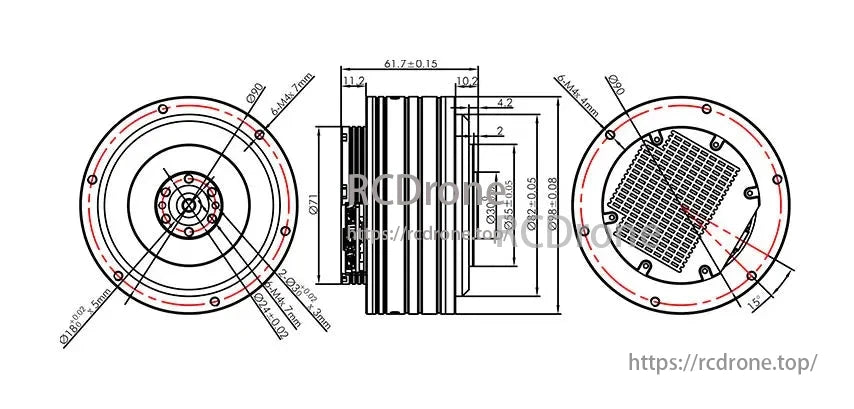
Optimera struktur och värmestrålning snabbt. Förbättra motorhöljets värmeavledning för lång livslängd och stabilitet i drivmodulens prestanda. SN: 1010921081.
Related Collections






