



DAMIAO DM-2325 24 V, 380 rpm, 5 N·m robotmotor med 1:25 växel, CAN/FD CAN och inkrementell encoder
DAMIAO DM-2325 24 V, 380 rpm, 5 N·m robotmotor med 1:25 växel, CAN/FD CAN och inkrementell encoder
DAMIAO
Ordinarie pris
$45.00 USD
Ordinarie pris
Försäljningspris
$45.00 USD
Enhetspris
per
Skatter ingår.
Frakt beräknas i kassan.
Det gick inte att ladda hämtningstillgänglighet
Översikt
DAMIAO DM-2325 är en kompakt robotmotor designad för precis rörelsekontroll inom robotik. Den har inkrementell encoderåterkoppling, CAN/FD CAN-kontrollgränssnitt och UART-konfiguration. Med ett reduktionsförhållande på 1:25, 24 V strömförsörjning och definierade kontrolllägen passar den för applikationer som kräver pålitlig hastighets- och positionsreglering.
Nyckelfunktioner
- Modell: DM-2325
- Nominell spänning: 24 V
- Nominell ström: 5 A / 3.2 A; Spetsström: 13 A / 7.5 A
- Nominellt vridmoment: 5 N·m; Spetsvridmoment: 2 N·m
- Nominell hastighet: 380 rpm; Max. tomgångshastighet: 560 rpm
- Reduktionsförhållande: 1:25; Polpar: 7
- Fasinduktans: 75 μH; Fasmotstånd: 0.2915 Ω
- Maximal radiell belastning: 395 N
- Mått: 28 mm ytterdiameter; 77.6 mm höjd
- Motovikt: 172.
- Vikt: 2 g
- Encoder typ: Inkrementell encoder
- Kontrollgränssnitt: CAN@1 Mbps (Max), FD CAN@5 Mbps (Max)
- Konfigurationsgränssnitt: UART@921600 bps
- Kontrolllägen: MIT-läge, Hastighetsläge, Positionsläge
Specifikationer
| Modell | DM-2325 |
| Nominell spänning | 24 V |
| Nominell ström | 5 A / 3.2 A |
| Spetsström | 13 A / 7.5 A |
| Nominellt vridmoment | 5 N·m |
| Spetsvridmoment | 2 N·m |
| Nominell hastighet | 380 rpm |
| Max. tomgångshastighet | 560 rpm |
| Utväxlingsförhållande | 1:25 |
| Polpar | 7 |
| Fasinduktans | 75 μH |
| Fasmotstånd | 0.html 2915 Ω |
| Maximal radial belastning | 395 N |
| Yttre diameter | 28 mm |
| Höjd | 77.6 mm |
| Motors vikt | 172.2 g |
| Encoder typ | Inkrementell encoder |
| Kontrollgränssnitt | CAN@1 Mbps (Max), FD CAN@5 Mbps (Max) |
| Konfigurationsgränssnitt | UART@921600 bps |
| Kontrolllägen | MIT-läge; Hastighetsläge; Positionsläge |
Skydd
- Övertemperaturskydd för drivning; skyddstemperatur: 120 °C. Övertemperatur lämnar "aktiveringsläge".
- Övertemperaturskydd för motor; ställs in enligt användningskrav (rekommenderas att inte överskrida 100 °C). Övertemperatur lämnar "aktiveringsläge".
- Överspänningsskydd för motor; ställs in enligt användningskrav (rekommenderas att inte överskrida 60 V). Överspänning lämnar "aktiveringsläge". html
- Skydd mot kommunikationsförlust; om ingen CAN-kommandon tas emot inom den angivna perioden, går systemet ur "aktiveringsläge".
- Skydd mot överström för motor; ställs in enligt användningskrav (rekommenderas att inte överskrida 13 A). Överström går ur "aktiveringsläge".
- Skydd mot undervolt för motor; om matningsspänningen är lägre än det angivna värdet, går ur "aktiveringsläge" (matningsspänning inte mindre än 15 V).
Tillämpningar
- Humanoida robotar
- Robotarmar
- Exoskelett
- Fyra-benta robotar
- AGV-fordon
- ARU-robotar
Manualer och nedladdningar
- DM_2325_Motor.stp
- DM_2325_Motor_armature.stp
- DM-2325_installationsritning.pdf
- DM-2325_armatur_installationsritning.pdf
Installationsritning
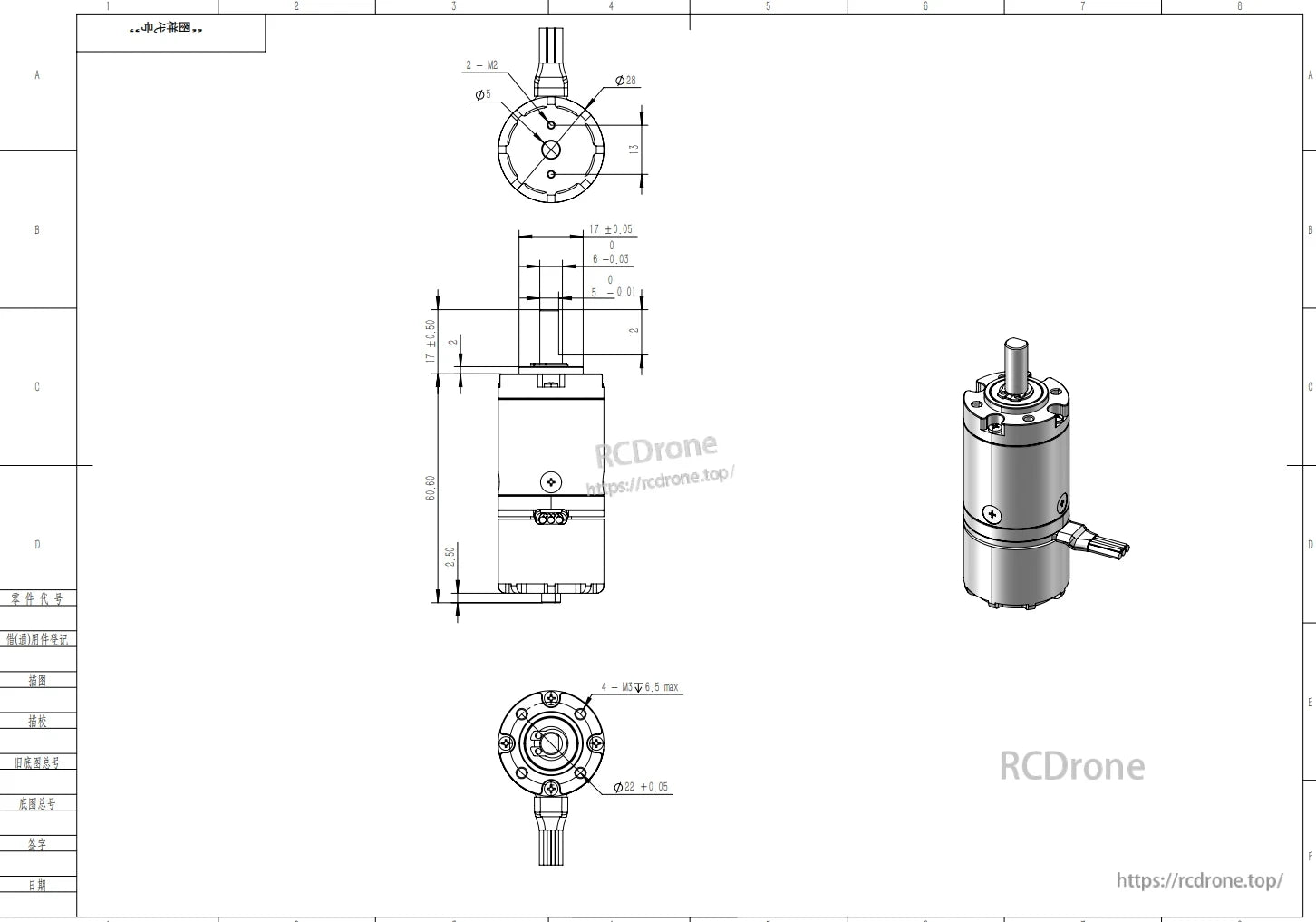
Teknisk ritning av robotmotor med mått och specifikationer
Detaljer
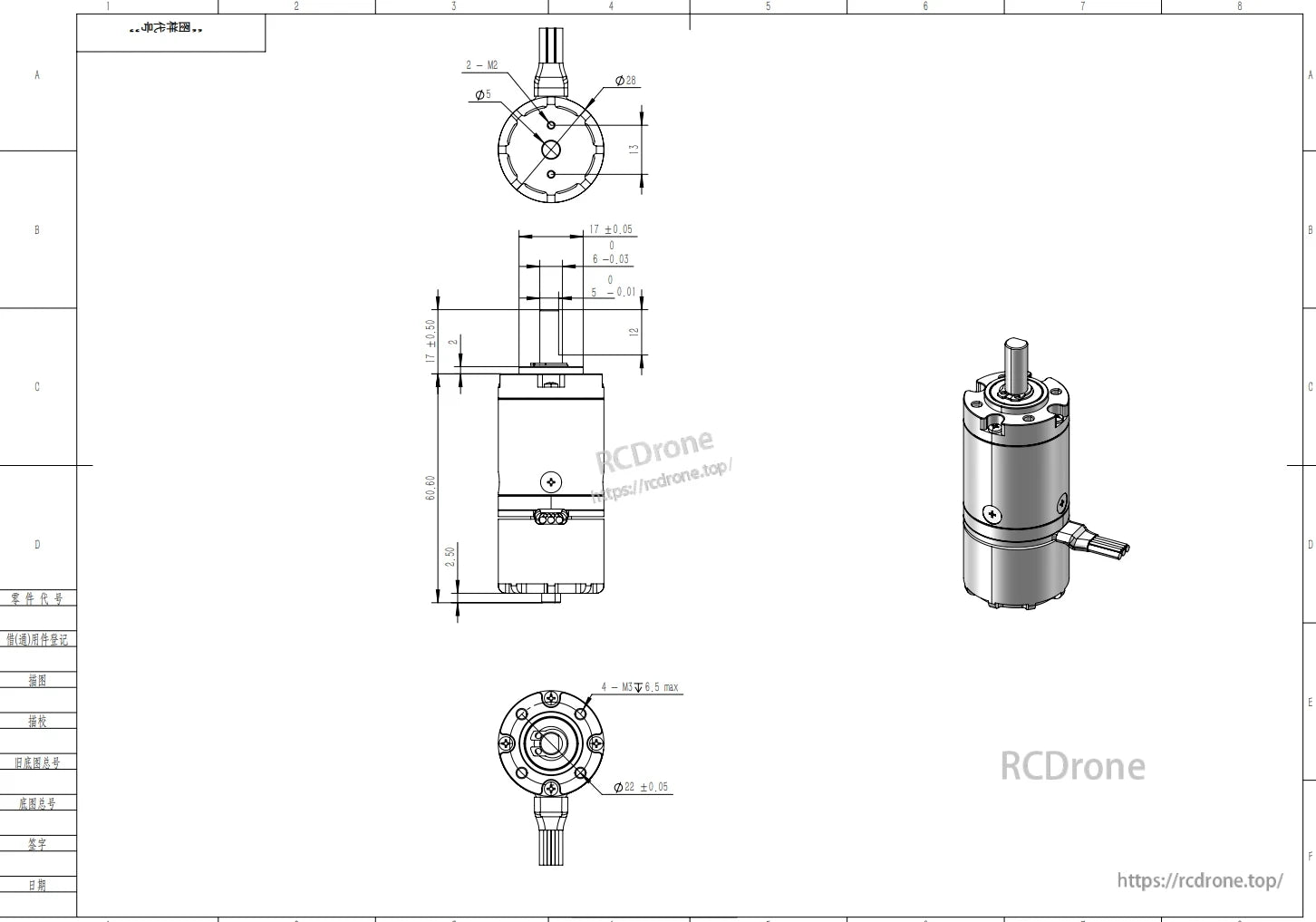
Teknisk ritning av robotmotor med dimensioner och specifikationer

Teknisk ritning av robotmotor med dimensioner och 3D-vy
Related Collections



