




DFRobot SEN0142 MPU6050 6 DOF Gyroskop Accelerometer IMU-modul med I2C Digital Motion Processor för Arduino & Robotik
DFRobot SEN0142 MPU6050 6 DOF Gyroskop Accelerometer IMU-modul med I2C Digital Motion Processor för Arduino & Robotik
DFRobot
Det gick inte att ladda hämtningstillgänglighet
Översikt
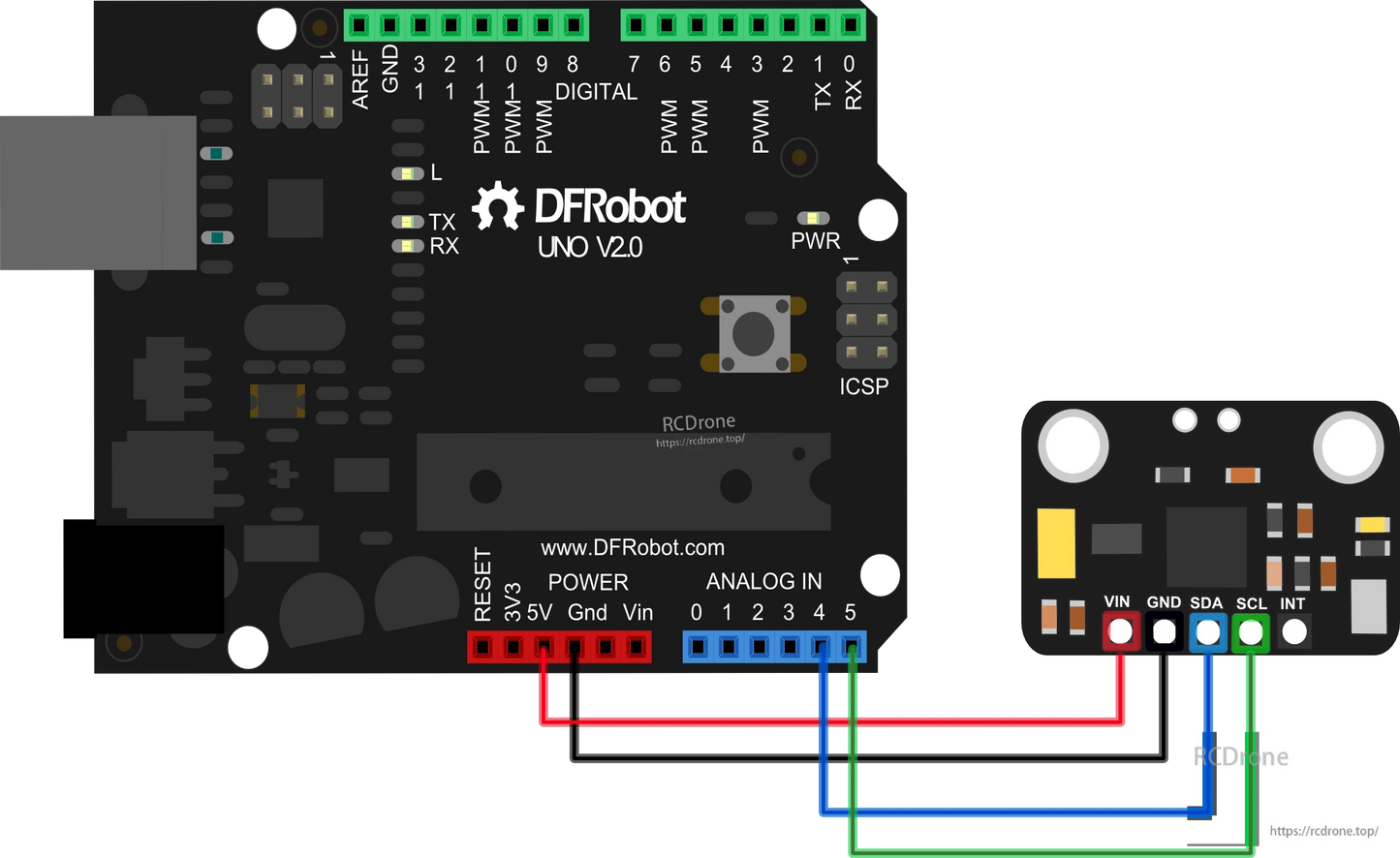
DFRobot SEN0142 MPU6050 6 DOF IMU-modul integrerar en 3-axlig gyroskop och 3-axlig accelerometer på en enda chip, vilket ger noggrann rörelsesensning för robotik, drönare, bärbara enheter och Arduino-projekt. Med en Digital Motion Processor (DMP) stödjer den avancerade 6-axliga och 9-axliga MotionFusion-algoritmer, vilket möjliggör quaternion, Euler-vinkel och rå sensor datautgång. Med ett brett ingångsspänningsområde på 3V–5V kan MPU6050 kopplas direkt till Arduino och andra mikrokontroller för realtids rörelsespårning och gestdetektering.
Nyckelfunktioner
-
Kombinerar 3-axlig gyroskop och 3-axlig accelerometer i ett chip
-
Programmerbar accelerometerområde: ±2g, ±4g, ±8g, ±16g
-
Gyroskop känslighet: ±250, ±500, ±1000, ±2000 dps
-
Digital Motion Processor (DMP) för ombord MotionFusion och gestigenkänning
-
I2C digitalt gränssnitt stöder matris, kvaternion, Euler och rådataformat
-
Inbyggd bias & kompasskalibrering för förbättrad noggrannhet
-
Kompatibel med Arduino och bärbar elektronik via I2Cdevlib
Specifikationer
-
Arbetsvoltage: 3–5 V
Utdata: I2C digital (6/9-axlig MotionFusion data)
-
Accelerometer: ±2g / ±4g / ±8g / ±16g programmerbar räckvidd
-
Gyroskop: ±250 / ±500 / ±1000 / ±2000 dps känslighet
-
Dataformat: Rotationsmatris, kvaternion, Euler-vinkel, rådata
-
Mått: 14 × 21 mm
Tillämpningar
-
Robotik rörelsesensorn
-
Arduino &och DIY elektronikprojekt
-
Människa-datorinteraktion (HCI)
-
Bärbara enheter och gestkontroll
-
Navigations- och balanssystem (e.g., Segway-typ transportörer)
-
Drönarstabilisering och rörelsespårning
Detaljer



Exempelkod
Vänligen ladda ner biblioteken för alla IMU-sensorer först!




- När du gör ett urval uppdateras sidan.
- Öppnas i ett nytt fönster.