F450-4B Raspberry Pi Programmerbar Drone Development Kit - Pixhawk DIY Ardupilot Industrial Open Source Drone Platforms
F450-4B Raspberry Pi Programmerbar Drone Development Kit - Pixhawk DIY Ardupilot Industrial Open Source Drone Platforms
RCDrone
Det gick inte att ladda hämtningstillgänglighet
Översikt
De F450-4B Raspberry Pi Drönare är en avancerad DIY Drone Kit som kombinerar en kraftfull Raspberry Pi 4B inbyggd dator med den mångsidiga Pixhawk 2.4.8 flygkontroller, vilket gör det till en mycket anpassningsbar och programmerbar drönare plattform. Detta Droneplattform med öppen källkod stöder banbrytande verktyg som Dronekit-python, vilket gör det möjligt för utvecklare att skapa autonoma uppdrag, dataöverföring i realtid och AI-drivna bildbehandlingsapplikationer. Med en robust 450 mm ram, en 200 MP HD-kamera, ett 3S 5200mAh-batteri för upp till 20 minuters flygning och avancerade flyglägen som höjdhållning, återgång till hemmet och cirkelläge, är F450 Drone Kit det perfekta valet för entusiaster, forskare och utbildare som söker en innovativ erfarenhet av utveckling av drönare.
Nyckelfunktioner
Högpresterande hårdvara
- Raspberry Pi 4B: Drivs av en 64-bitars 1,5 GHz fyrkärnig processor, stöder 4K-videoutgång och höghastighets WiFi-kommunikation för tillförlitlig drift.
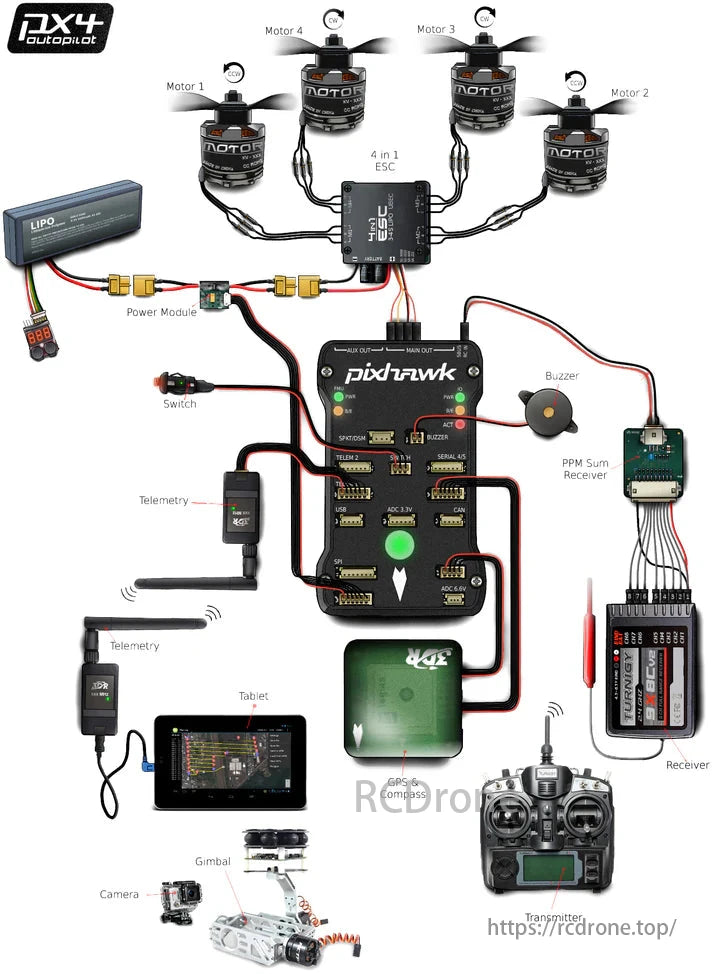
- Pixhawk 2.4.8 Flight Controller: Utrustad med flera integrerade sensorer, som säkerställer exakt attitydkontroll, svävning och uppdragsplanering.
- Stöd för visionexpansion: Parat med en monokulär kamera och OpenCV-verktyg, möter detta kit bildöverföring och bearbetningsbehov i realtid.
Olika flyglägen
- Altitude Hold (AltHold): Bibehåller en stabil flyghöjd.
- Sväva: Ger exakt stationär svävning.
- Återgå till hemmet (Återvända): Återgår automatiskt till startpunkten vid signalförlust eller lågt batteri.
- Landning (Land): Utför mjuk autonom landning.
- Stabiliseringsläge: Justerar flygläge automatiskt.
- Cirkelläge: Utför cirkulära flygningar runt ett mål.
- Huvudlöst läge: Tar bort riktningsbegränsningar för enklare kontroll.
- Utom kontroll Return: Återgår till en förinställd plats när signalen försvinner.
- Lågeffektlandning: Landar säkert under låg batterinivå.
Dataöverföring och bildbehandling
- Etablerar ett lokalt WiFi-nätverk genom en inbyggd hotspot utan att behöva externa routrar, vilket möjliggör data- och bildöverföring i realtid.
- Stöder OpenCV-baserad videoströmning och analys, perfekt för bildövervakning och intelligenta applikationer.
Specifikationer
Drönarparametrar
| Parameter | Detaljer |
|---|---|
| Namn | F450 Drönarsats |
| Hjulbas | 450 mm |
| Vikt | 1493g (med batteri och Raspberry Pi 4B) |
| Flygkontrollant | Pixhawk 2.4.8 flygledare med öppen källkod |
| Dator ombord | Raspberry Pi 4B |
| Kamera | 200 MP HD 1080P |
| Svävande stöd | Optisk flödesmodul och laseravståndssensor |
| GPS-modul | m8n GPS |
| Flygtid | ~20 minuter (beroende på miljö och uppdrag) |
| Batteri | 3S 5200mAh (11,1V) |
| Lastkapacitet | 500 g |
| Vindmotstånd | Nivå 3-4 |
| Motor | SunnySky A2212 |
| ESC | Hobbywing 20A ESC (stöder 3S-4S LiPo-batterier) |
| Propellrar | T1045 självlåsande propellrar |
| Max höjd | 2000m (störningsfri) |
| Flight Range | 1000m |
| Flygscenarier | Inomhus / Utomhus |
Specifikationer för Pixhawk 2.4.8 Flight Controller
- Processor: 32-bitars ARM STM32F427 Cortex M4, 168MHz, 256KB RAM
- Sensorer:
- L3GD20 3-axligt 6DOF gyroskop
- LSM303D 3-axlig 14-bitars accelerometer/magnetometer
- MPU6000 6-axlig accelerometer/magnetometer
- MS5611 högprecisionsbarometer
- Kompatibilitet med markkontroll: QGroundControl, MissionPlanner
- Mått: 81 mm x 47 mm x 16 mm; Vikt: 37g
Raspberry Pi 4B-specifikationer
- Chipset: Broadcom BCM2711
- CPU: 64-bitars 1,5 GHz fyrkärnig
- GPU: 500MHz VideoCore VI
- RAM: 4GB DDR4
- Gränssnitt: 2 x USB 3.0, 2 x USB 2.0
- Videoutgång: Dubbla mikro HDMI-portar, stöder 4K@60Hz
- Kommunikation: Bluetooth 5.0, WiFi 5 (2,4/5GHz)
- Strömförsörjning: USB Type-C (5V 3A)
Paketet inkluderar
Konfiguration 1: SunnySky A2212-motor med FlySky i6-fjärrkontroll och telemetri
- F450 ram med landningsställ
- SunnySky A2212 motorer (4 st)
- Hobbywing 20A ESC (4 st)
- T1045 självlåsande propellrar (4 par)
- PIX M8n GPS-modul
- Vibrationsdämpande platta
- FlySky i6 fjärrkontroll
- 3S 5200mAh batteri
- B3 balansladdare
- GPS-fäste
- FS-spänningstelemetrimodul

Ingår: Batteriremmar, buntband i nylon, träkuddar, 3M tejp, summer, installationsverktyg
Monterings- och felsökningsvideor, relaterat material tillhandahålls; kontakta kundtjänst för källkod.
Konfiguration 2: SunnySky A2212 Motor med Radiolink PRO
- F450 ram med landningsställ
- SunnySky A2212 motorer (4 st)
- Hobbywing 20A ESC (4 st)
- 9450 självlåsande propellrar (3 par)
- PIX.M8n GPS-modulsats
- Vibrationsdämpande platta
- Radiolink PRO (R9DS-mottagare)
- 3S 2200mAh kontrollbatteri
- 3S 5200mAh batteri
- B3 balansladdare
- GPS-fäste

Ingår: Batteriremmar, buntband i nylon, träkuddar, 3M tejp, summer, installationsverktyg
Monterings- och felsökningsvideor, relaterat material tillhandahålls; kontakta kundtjänst för källkod.
F450 Drone Kit Montering
Applikationsscenarier
F450-4B Drone Development Kit är idealisk för:
- Drönare FoU: Universitetsforskning, flygkontrolltestning, algoritmutveckling.
- Intelligenta applikationer: Vägplanering, måligenkänning och undvikande av hinder.
- Utbildningsexperiment: Programmering, hårdvarumontering och felsökning.
- Fältanvändning: Inomhussvävning, utomhusmätning, jordbruksövervakning med mera.
Detaljer
F450-4B Raspberry Pi Drone Development Platform
F450 är en klassisk och vanligt förekommande drönarmodell, som erbjuder enkel och bekväm montering, hög kostnadsprestanda, stark funktionalitet och lämplighet för nybörjare att snabbt komma igång med drönaroperationer.

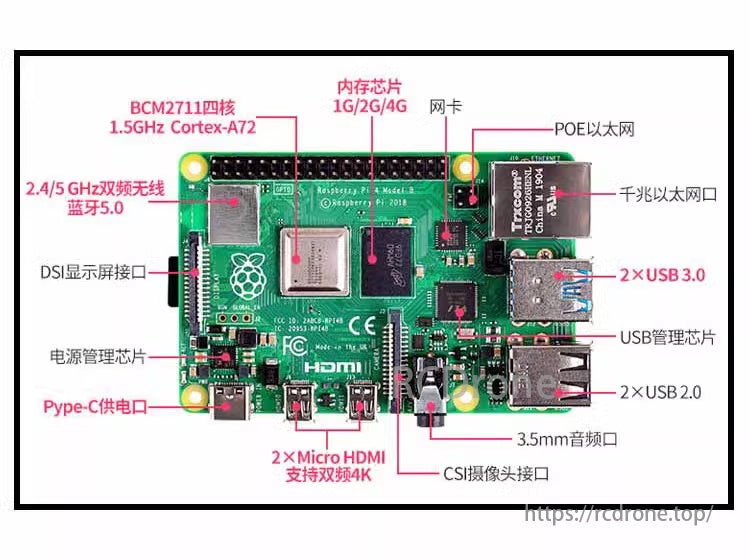
Uppgraderad Raspberry Pi 4B
Raspberry Pi 4B hårdvaruprocessorkraft är betydligt starkare än 3B+.
Raspberry Pi är utrustad med det senaste open source-systemet Ubuntu 20.04, som erbjuder en smidigare upplevelse jämfört med Ubuntu Mate-systemet.

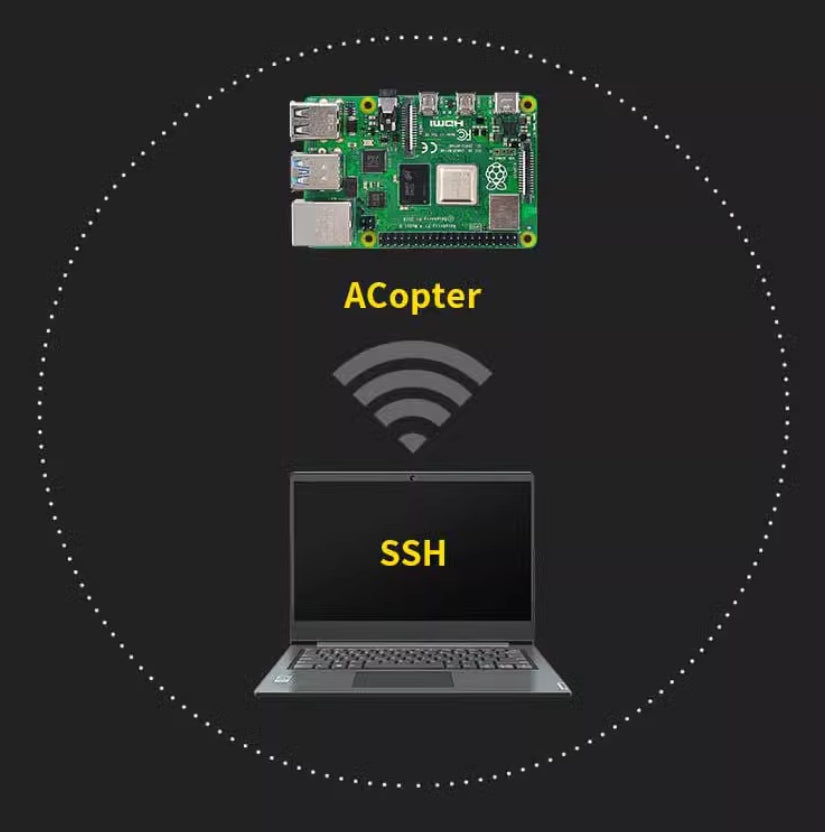
Systemaktiverad WiFi-hotspot (Acopter)
Med hjälp av WiFi-kapaciteten hos Raspberry Pi 4B skapas en självbyggd hotspot (Acopter). Datorn kan ansluta direkt till 4B:s WiFi-hotspot för att bilda ett lokalt nätverk och använda SSH-kommandon för fjärråtkomst till Raspberry Pi. Till skillnad från 3B+-modellen som kräver en router för nätverkskonfiguration, är denna installation mycket enklare och mer användarvänlig för nybörjare.
OpenCV visuell bearbetning
En monokulär kamera läggs till, vilket möjliggör bildöverföring och efterbehandling. Videoströmmar kan fångas via Raspberry Pi och bearbetas med verktyg som OpenCV. Realtids HD-videoströmmar kan också överföras tillbaka till en PC för bearbetning eller till en mobil enhet för visning.

Mer expansionsgränssnitt
Raspberry Pi 4B erbjuder ett brett utbud av expansionsgränssnitt, inklusive dubbla USB 3.0-portar, dubbla 4K micro HDMI-portar, CSI- och DSI-gränssnitt, gigabit Ethernet och en Type-C-strömförsörjning, vilket ger exceptionell mångsidighet för olika applikationer.
Single Camera Edition
Enkelkamerautgåvan inkluderar en Raspberry Pi 4B och en monokulär kamera, vilket möjliggör kommunikation via en seriell port med flygkontrollern. Den stöder uppgifter som visuell bearbetning, Python-programmering och kommunikation. Den här versionen är lämplig för användare med tidigare erfarenhet av att använda Pixhawk, grundläggande kunskaper om Ubuntu (Linux), OpenCV, Raspberry Pi och lokalt nätverkskommunikation.
Utöver de grundläggande funktionerna stöder singelkamerautgåvan bild- och dataöverföring över WiFi och tillåter kontroll av drönaren genom Dronekit-python programmering.

Optisk flödespositionering
Svävningskontroll inomhus med Dronekit-python under optiska flödespositioneringsförhållanden

Denna utvecklingsplattform för drönare stöder ROS, Python programmering, OpenCV-bildigenkänning, 4G långdistansöverföring, och Aruco 2D-kod visuell guidad landning, vilket gör den mycket mångsidig och innovativ.

FlySky i6 fjärrkontroll
Utrustad med en ia6b-mottagare förladdad med 10-kanals firmware, spänningstelemetrimodul och en fjärrkontrollsräckvidd på över 1000m, perfekt för nybörjare att lära sig och öva.

Radiolink AT9S fjärrkontroll
Har 10 kanaler med ett kontrollområde på över 2000m. Utrustad med en telemetrimodul som ger data om batterispänning, GPS-satelliträkning, flyghöjd, koordinater, flygläge och mer.

FAQ
1. Kan jag utföra sekundär utveckling? Kan jag programmera självständigt?
Svaret är ja. Som tidigare introducerats är Ardupilot för närvarande det mest använda flygkontrollsystemet med öppen källkod, och många utmärkta inhemska och internationella drönarmodeller utvecklas baserat på detta system.
Sekundär utveckling har huvudsakligen två riktningar: flygkontrollutveckling och extern expansion.
- Flygkontrollutveckling
Vi använder Ardupilot, så att lära oss flygkontrollutveckling med öppen källkod innebär i första hand att studera Ardupilot-projektet med öppen källkod.
- Starka programmeringskunskaper krävs (källkoden är i C++), tillsammans med kunskap om avancerad matematik (diskret matematik, iteration, linjärisering), Kalman-filtrering och inbäddad utveckling.
- Det behövs en solid teoretisk grund. Detta förbereder dig för att arbeta med utveckling av obemannade system och FoU för flygkontroll.
Om du vill fokusera på utveckling av flygkontroll måste det mesta av arbetet göras på din dator:
- Att ställa in programmeringsmiljön, ladda ner källkoden för flygkontroll, studera dess arkitektur och funktionsmoduler, etc.
- När du väl är bekant med kodramverket kan du börja programmera baserat på den befintliga koden.
Börja med en grundläggande flygkontrollmodell och hänvisa till Ardupilot flygkontrolllärobok som vi tillhandahåller för vägledning.
- Extern expansionsutveckling
Extern expansion låter dig lägga till externa enheter baserat på dina uppgifter och scenarier genom de reserverade gränssnitten för flygledaren. Till exempel:
- Lägg till en optisk flödesmodul för inomhuspositionering och svävning.
- Lägg till en laserradar för att undvika hinder.
- Använd telemetri för att möjliggöra autonom flyg- och ruttplanering.
- Installera en inbyggd dator (t.ex. Raspberry Pi) och använd Dronekit-Python eller ROS för att programmera för att styra drönaren.
Målet med att lägga till en inbyggd dator är att hantera mer komplexa uppgifter, såsom:
- Använda Raspberry Pi-kameran för visuell igenkänning (kräver OpenCV, YOLO, etc.).
- Kombinera kommunikationsprotokoll för att styra drönarens flygning.
- Sändning av flygdata eller högupplösta videor via nätverk.
Dessa funktioner kan inte uppnås enbart genom att lita på flygledaren.
Att studera extern expansion fokuserar främst på applikationer, vilket också är riktningen för de flesta tävlingar i hela landet.Efter lärande kan du utforska kritiska områden av intelligenta drönare, som visuell igenkänning, AI-integration med drönare och mer.
2. Vilka är förutsättningarna för självständig utveckling?
Att lära sig om drönare är en gradvis process. Drönarsystem är tvärvetenskapliga och integrerande och involverar ett brett spektrum av kunskapsområden. För att lära sig drönarutveckling krävs följande grunder:
- Grundläggande praktiska färdigheter, inklusive färdigheter i att använda lödkolvar, olika skruvmejslar och andra verktyg.
- Grundläggande kunskaper om elektronik: begrepp som spänning, ström, effekt, polaritet och signaler.
- Grundläggande kunskap om automationsstyrning: PID-styrning, återkoppling, digitala signaler, analoga signaler m.m.
- Grundläggande datorkunskaper: drivrutiner, serieportar, baudhastigheter, firmwareversioner, programvaruversioner.
- Grundläggande kunskap om Pixhawk-drönare.
- Grundläggande kunskap om operativsystemet Ubuntu.
- Kunskaper i programmeringsspråk: som C++ och Python.
Hur man gör Respberry PI Drone?
Related Collections