






Feetech SCS20 - 6V 20kg.cm 360 graders magnetisk kod Seriell kontroll TTL Servo 20kg scs servo Busspaketkommunikation
Feetech SCS20 - 6V 20kg.cm 360 graders magnetisk kod Seriell kontroll TTL Servo 20kg scs servo Busspaketkommunikation
Feetech
Det gick inte att ladda hämtningstillgänglighet
SPECIFIKATIONER
Varumärke: Feetech
Ursprung: Kina
Material: Plast
Plasttyp: PC
RC-delar och tillbehör: Batterier - LiPo
Storlek: 10*10*10
För fordonstyp: Bilar
Använd: Fordon och fjärrkontrollleksaker
Uppgradera delar/tillbehör: litiumbatteri
Fjärrkontroll Kringutrustning/enheter: Fjärrkontroll
Verktygstillbehör: Batteri
Mängd: 1 st
Tekniska parametrar: KV1100
Modellnummer: SCS20-360T
Fyrhjulsdriftattribut: Motorer
Hjulbas: Skruvar
Modellnummer: STS3020
Storlek: 40 X 20 X 40,5 mm
Vikt: 62g
Kugghjulstyp: Koppar och aluminium
Gränsvinkel: INGEN gräns
Lager: 2 Kullager
Humndrevsspline: 25T(4,96 mm)
Motor: Borstmotor i metall
Driftspänningsområde: 6-7,4V
Högsta stoppmoment: 20kg.cm@6V
Nominellt vridmoment: 6,6 kg.cm@6V
Protokolltyp: Halv duplex asynkron seriell kommunikation
Följe: Aluminium och plast
|
1. Tillämpa miljövillkor 4-1 Tomgångsström (vid stoppad) 10mA 10mA
Elektronisk kontrollfunktion:
1.Acceleration start-stopp-funktion: hastighet och accelerationsvärde kan ställas in, rörelseeffekten är mer skonsam. 2.Hög precision, 360 graders absolut position 4096 bitars precision, den högsta positionsupplösningen är 0,088 grader, om kontrollen är 90 grader, inmatning 4096 / 360 * 90 = 1024, om kontrollen är 180 grader, ingång 4096 / 360 * 180 = 2048, för att beräkna. 3.Det finns fyra arbetslägesomkopplingar (läge 0 läge servo, läge 1 hastighet sluten krets, läge 2 hastighet öppen slinga, läge 3 stegservo). 1)、Läge 0:Platsläge, standardläget. I detta läge kan 360 graders absolut vinkelkontroll realiseras. Stöd accelerationsrörelse. 2)、Läge 1:Speed closed-loop, i programmeringsgränssnittet är driftläget inställt på 1, byt till hastighet med sluten slinga och ange motsvarande hastighet i hastighetskolumnen för att köra . 3)、Läge 2:Speed open-loop, i programmeringsgränssnittet, är driftläget inställt på 2, byt till hastighet open-loop-läge och ange motsvarande tid i tidskolumnen för att köra. 4)、Läge 3:Stegläge: i programmeringsgränssnittet är den maximala/minsta vinkelgränsen inställd på 0, och driftläget är inställt på 3. Växla till stegläget. Ange positionen i positionsfältet för att gå mot målpositionen. Klicka på positionen igen för att fortsätta att stega i samma riktning. 4、Multisvarvläge, 360 graders absolut kontroll och återkoppling, under högsta noggrannhet kan den absoluta positionskontrollen vara plus eller minus 7 varv, men antalet effektcykler sparas inte, bara det absoluta positionsåterkopplingsvärdet behålls. 5、En nyckelkalibrering, 360 graders vinkelinstallation i valfri position, (40 (decimal) adressingång 128 (decimal)) en tangentkorrigering aktuell position är mitten (2048 (decimal)). 6, TTL-kommunikationsnivå, halvduplex asynkron kommunikation, bussprotokollstöd för att justera läs- och skrivparametrar och lägga till synkron läsfunktion (skicka en instruktion att ta emot återläsningsinstruktionen från varje servo på bussen i tur och ordning.) 7、Flera skydd, (överbelastning, överström, överspänning, överhettning, brytarinställning, ändring av tillståndsparameter) 1)、Överbelastningsskydd: genom positionsdetektering, under rörelsen från startpositionen till målpositionen, när den aktuella positionen detekteras inte vara målpositionen efter att ha stött på blockering av hinder, varar avlastningskraften i 2S (20% av standardblockeringskraften). Tills ett nytt kommando utlöses, Släpp skydd 2)、Överströmsskydd: genom det inställda strömvärdet, kontrollera om strömmen når det inställda strömvärdet. När den når det inställda strömvärdet, släpp kraften (standardvridmomentet är 0). Tills ett nytt kommando utlöses, Släpp skydd 3)、Överspänningsskydd: detektera det aktuella spänningsvärdet. Om det överskrider det inställda spänningsvärdet kommer larmet visa överspänning. 4)、Överhettningsskydd: detektera den aktuella motortemperaturen. Om temperaturen överstiger det inställda värdet kommer larmet att visa överhettning. 8:Multipel återkoppling: 1)Laståterkoppling: strömstyrutgången driver motorns spänningsdriftcykel, och fullskalan är 1000 = 100 % vridmomentutgång. 2)Strömåterkoppling: Servots arbetsström, 1 = 6,5mA 3)Spänningsåterkoppling: Servots arbetsspänning,70=7V,0,1V 4) Temperaturåterkoppling: intern arbetstemperatur för nuvarande servo (mätning av temperatur)。 5)Hastighetsåterkoppling: återkoppla hastigheten för aktuell motorrotation och antalet steg i tidsenhet (per sekund) 9、Öppna PID-parametrar. |




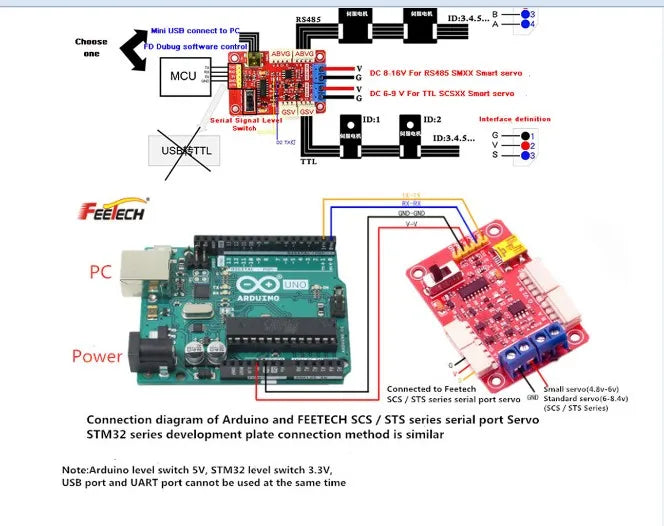
>hmni USB unmChu Chontc Dubuq ior contfo A8-zi DC R I6y Fr RSRS Shr Smuc] >hrtu MCU DC EBYFor ECsX Smor keno 5eal 6i00.
Related Collections






