ST-3046-C001 är en 6V 40 kg seriebuss smart servo,adoptera helhölje i aluminiumlegering、kärnlös motor、stålväxellåda、kärnlös motor, Feetech egenutforskad och utvecklad TTL12-kontrollkort bit hög precision magnetisk kodningssensor. Stoppvridmomentet är 40 kg.cm, kan återkopplingsläge, hastighet, spänning, ström, temperatur, belastningsparametrar, sålunda kan överbelastnings- och överströmsskydd realiseras. Den är lämplig för tillämpning i industriell utrustning, robot- och transmissionsapplikationsscenarier.
SKU:STS3046
Produktnamn:7,4V 40KG.CM Plastväska Metal Gear Magnetic Encoder Enkelaxel TTL seriebussservo
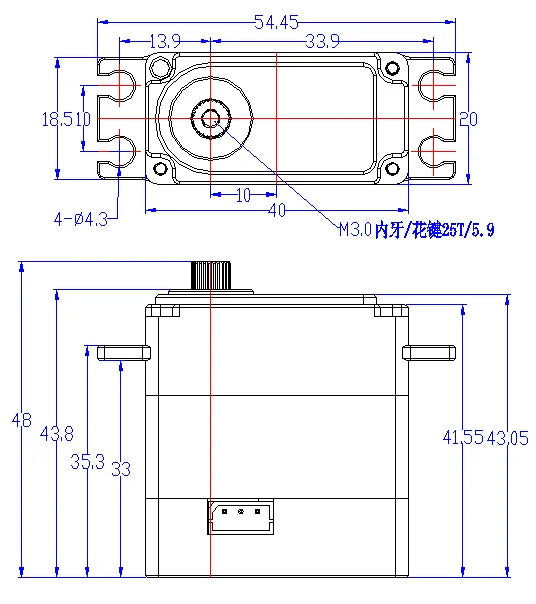
Utseendestorlek:45,2X24,7X35mm>Se blått(4x35mm> Stall Moment:[email protected]
Stall Speed:[email protected]
Feedback: belastning / position / hastighet / spänning / ström / temperatur
Elektroniskt skydd: överhettning / överström / överspänning / överbelastningsskydd




Strukturella egenskaper:
Höljet antar tekniskt plastskal med högre hållfasthet,Optimera mittavståndet,Mer kompakt övergripande struktur, Servoväxeln antar 1:345 kopparväxelkombination,högre vridmoment;Med samma vridmoment ,jämför med standard servostorlek,det ser lägre profil ut(5mm),Kroppen antar dubbelaxlig strukturdesign,De strukturella egenskaperna hos den cirkelfodrade solida,Kabelmoden för dubbla utgående kablar med metall Huvudställande servohorn,Den är lämplig för applikation i fyrbäddsrobot, ormrobot, stationär robot, humanoid robot och mekanisk arm.
Elektronisk kontrollfunktion:
1.Acceleration start-stopp-funktion: hastighet och accelerationsvärde kan ställas in, rörelseeffekten är mer skonsam.
2.Hög precision, 360 graders absolut position 4096 bitars precision, den högsta positionsupplösningen är 0,088 grader, om kontrollen är 90 grader, inmatning 4096 / 360 * 90 = 1024, om kontrollen är 180 grader, ingång 4096 / 360 * 10480 = 2 , för att beräkna.
3.Det finns fyra arbetslägesomkopplingar (läge 0-lägesservo, läge 1-hastighet sluten slinga, läge 2-hastighet öppen slinga, läge 3-stegs servo).
1)、Läge 0:Platsläge, standardläget. I detta läge kan 360 graders absolut vinkelkontroll realiseras. Stöd accelerationsrörelse.
2)、Läge 1:Speed closed-loop, i programmeringsgränssnittet är driftläget inställt på 1, byt till hastighet closed-loop-läge och ange motsvarande hastighet i hastighetskolumnen för att köra .
3)、Läge 2:Speed open-loop, i programmeringsgränssnittet är driftläget inställt på 2, växla till hastighet open-loop-läge och ange motsvarande tid i tidskolumnen för att köra.
4)、Läge 3:Stegläge: i programmeringsgränssnittet är den maximala/minsta vinkelgränsen inställd på 0, och driftläget är inställt på 3. Växla till stegläget. Ange positionen i positionsfältet för att gå mot målpositionen. Klicka på positionen igen för att fortsätta att stega i samma riktning.
4、Multisvarvläge, 360 graders absolut kontroll och återkoppling, under högsta noggrannhet kan den absoluta positionskontrollen vara plus eller minus 7 varv, men antalet effektcykler sparas inte, bara det absoluta positionsåterkopplingsvärdet behålls.
5、En nyckelkalibrering, 360 graders vinkelinstallation i valfri position, (40 (decimal) adressingång 128 (decimal)) en tangentkorrigering aktuell position är mitten (2048 (decimal)).
6, TTL-kommunikationsnivå, halvduplex asynkron kommunikation, bussprotokollstöd för att justera läs- och skrivparametrar och lägga till synkron läsfunktion (skicka en instruktion att ta emot återläsningsinstruktionen från varje servo på bussen i tur och ordning.)
7、Flera skydd, (överbelastning, överström, överspänning, överhettning, brytarinställning, ändring av tillståndsparameter)
1)、Överbelastningsskydd: genom positionsdetektering, under rörelsen från startpositionen till målpositionen, när den aktuella positionen detekteras inte vara målpositionen efter att ha stött på blockering av hinder, varar avlastningskraften i 2S (20% av standardblockeringskraften). Tills ett nytt kommando utlöses, Släpp skydd
2)、Överströmsskydd: genom det inställda strömvärdet, kontrollera om strömmen når det inställda strömvärdet. När den når det inställda strömvärdet, släpp kraften (standardvridmomentet är 0). Tills ett nytt kommando utlöses, Släpp skydd
3)、Överspänningsskydd: detektera det aktuella spänningsvärdet. Om det överskrider det inställda spänningsvärdet kommer larmet visa överspänning.
4)、Överhettningsskydd: detektera den aktuella motortemperaturen. Om temperaturen överstiger det inställda värdet kommer larmet att visa överhettning.
8:Multipel återkoppling:
1)Laståterkoppling: strömstyrutgången driver motorns spänningsdriftcykel, och fullskalan är 1000 = 100 % vridmomentutgång.
2)Strömåterkoppling: Servots arbetsström, 1 = 6,5mA
3)Spänningsåterkoppling: Servots arbetsspänning,70=7V,0,1V
4) Temperaturåterkoppling: intern arbetstemperatur för nuvarande servo (mätning av temperatur)。
5) Hastighetsåterkoppling: återkopplar hastigheten för aktuell motorrotation och antalet steg i tidsenhet (per sekund)

Våra tjänster: Vi erbjuder One-Stop Customized Solutions för Original Design Manufacturing (ODM) och Original Equipment Manufacturing (OEM). Våra möjligheter inkluderar elektronisk design, strukturell design och produktion.Dessutom tillhandahåller vi anpassningstjänster för produkter som servon med funktioner som PWM, RS485, 3V-24v drift och 0-360° återkopplingshjulskontroll.
Specialiserad på ODM och OEM och specialtillverkad 1.Din logotypetikett eller tryck
2.Servotråd
3.Förpackning:PE-väska, färglåda, plastlåda med känsla
din logotyp
4.Kabelkontakt
5.Anpassad Olika breda arbetsspänningsservo
9、Öppna PID-parametrar.
Våra produkter har klarat CE- och ROHS-certifiering, och de flesta av dem har ansökt om utseendepatent och bruksmodellpatent
Våra produkter har erhållit certifieringar från 'CE', 'RoHS' och 'REACH'. Dessutom har vi utseendepatent och modellpatent för våra mönster.