

HÖGT VRIDMOMENT HTDW-5047-36-NE-JC Motor, 36:1 Växel, 4Nm Märkt Vridmoment, 14-bitars Encoder, 12-48V
HÖGT VRIDMOMENT HTDW-5047-36-NE-JC Motor, 36:1 Växel, 4Nm Märkt Vridmoment, 14-bitars Encoder, 12-48V
HIGH TORQUE
Ordinarie pris
$308.80 USD
Ordinarie pris
Försäljningspris
$308.80 USD
Enhetspris
per
Skatter ingår.
Frakt beräknas i kassan.
Det gick inte att ladda hämtningstillgänglighet
Översikt
Den HÖGA TORQUE HTDW-5047-36-NE-JC Motorn är en kompakt växelmotor modul (Korsad Rullversion) designad för precis låg hastighet, hög vridmoment rörelsekontroll i robotik och automationssystem.
Tillämpningar
- Humanoida robotar
- Robotarmar
- Exoskelett
- Fyra-benta robotar
- AGV-fordon
- ARU-robotar
Nyckelfunktioner
- Modellidentifiering som visas: HTDW-5047-36-JC / HTDW-5047-36-NE-JC
- Reduceringsförhållande: 36
- Låg backlash och positionsnoggrannhet parametrar tillhandahålls för reducer/modul integration
- 14-bitars ingångsencoderupplösning och 14-bitars utgångsencoderupplösning
- Snabb responstid: ≤200us
- Kontrollfrekvens: 3kHz
För förhandsförsäljning och integrationssupport, kontakta https://rcdrone.top/ eller e-posta [email protected].
Specifikationer
| Längd och Bredd | 60mm |
| Höjd | 52.4mm |
| Vikt | 374g |
| Backlash | <10Arcmin |
| Upprepningsnoggrannhet för Positionering | <12Arcmin |
| Absolut Positioneringsnoggrannhet | <15Arcmin |
| Momentkonstant | 0.062Nm/A |
| Antal Polpar | 14 |
| Reduceringsförhållande | 36 |
| Blockerad rotorvridmoment | 21Nm |
| Tomgångsvarvtal | 60RPM |
| Nominalt vridmoment | 4Nm |
| Nominalt varvtal | 40RPM |
| Betyg | 17W |
| Spänningsområde | 12-48V |
| Spetsström | 10A |
| Hastighetskontrollnoggrannhet | ±15% |
| Ingångsencoderupplösning | 14-bit |
| Baud Rate | 5Mbps |
| Nominalström | 2A |
| Kontrollnoggrannhet | ±15% |
| Responsstid | ≤200us |
| Utgångsencoderupplösning | 14-bit |
| Kontrollfrekvens | 3kHz |
Manualer & Dokument
- HÖGDRIVKRAFT Motor Felsökningsassistent Användarmanual (PDF)
- Felsökningsmanual (PDF)
- 1.2 fdcan Protokollanalys (PDF)
- Användarmanual (PDF)
- HÖG TORQUE HTDW-5047-36-NE-JC Motor 3D Modell (STP, ZIP)
Detaljer

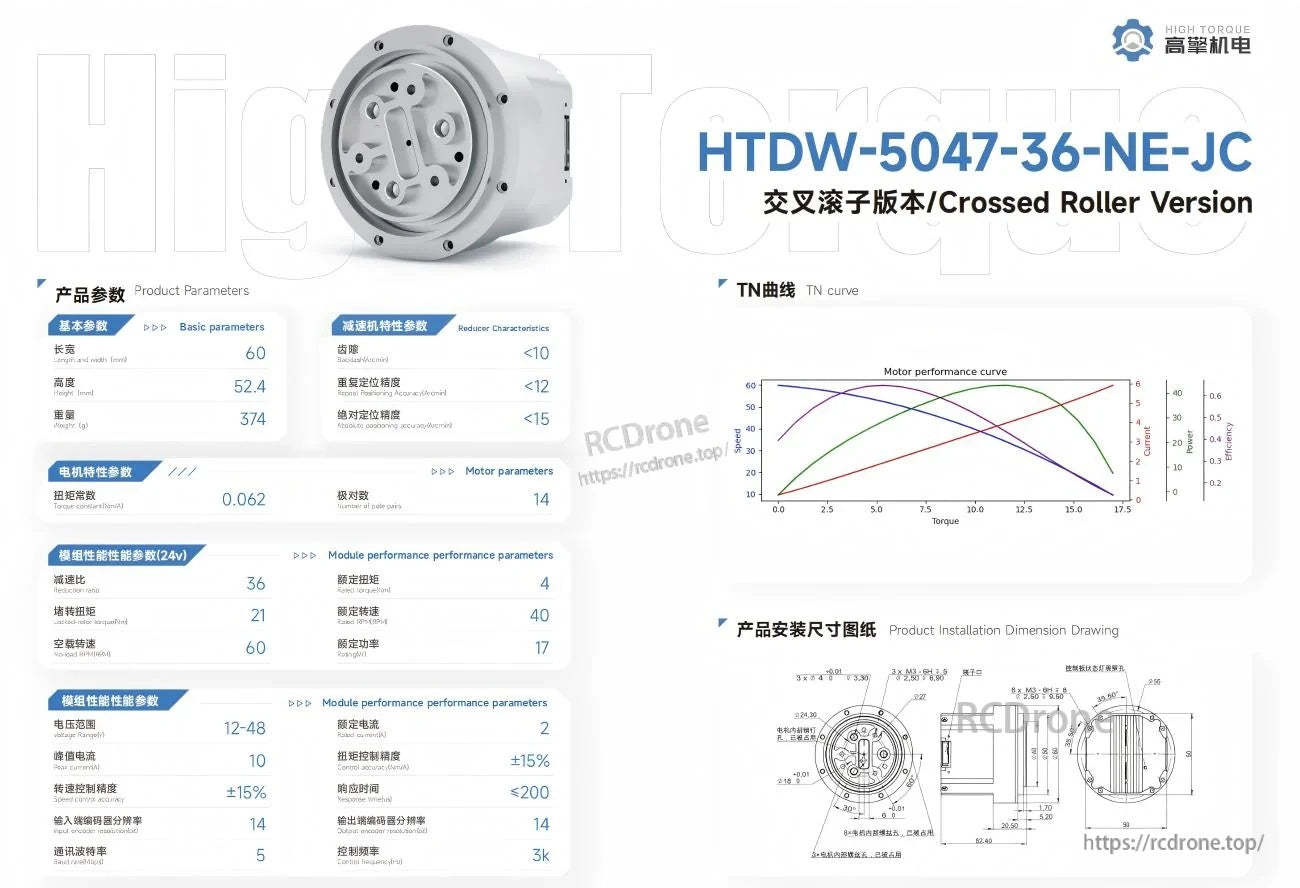
Korsade rullreducerar modulöversikt med nyckelparametrar, motorprestandakurvor och installationsdimensionritning för integrationsplanering.
Related Collections

