Holybro DroneCAN M8N GPS-modul - STM32G4-processor BMM150 Kompass 3GNSS-stöd DroneCAN-protokoll
Holybro DroneCAN M8N GPS-modul - STM32G4-processor BMM150 Kompass 3GNSS-stöd DroneCAN-protokoll
HolyBro
Det gick inte att ladda hämtningstillgänglighet
Beskrivning
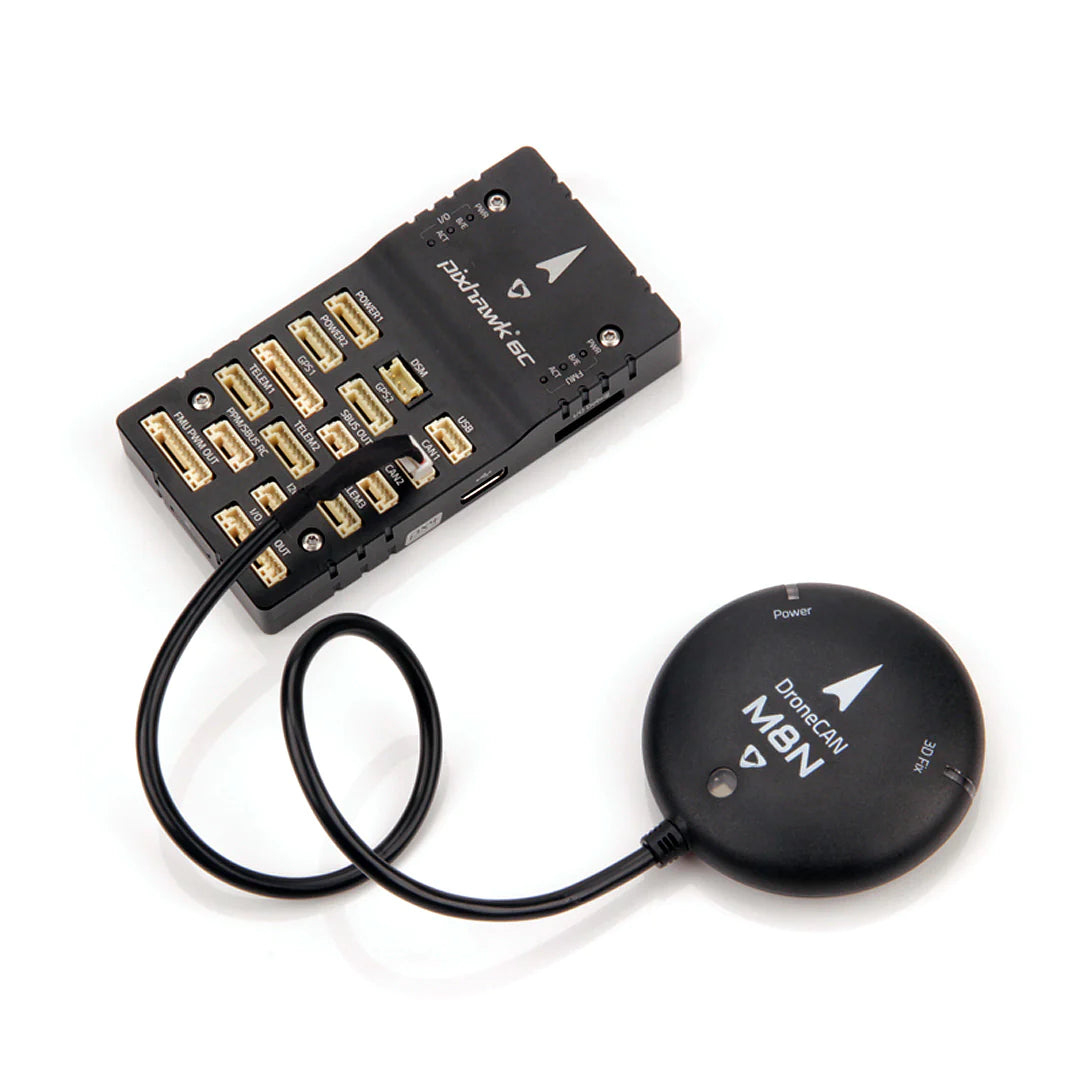
Holybro DroneCAN GPS har en UBLOX M8N eller M9N-modul, BMM150 kompass, trefärgad LED-indikator. Den har STM32G4-processorn och antog DroneCAN-protokollet för kommunikation, vilket gör den mer tillförlitlig och bättre för att hantera elektromagnetiska störningar jämfört med seriell anslutning. Den upptar inte någon seriell port på flygkontrollern, och olika CAN-enheter kan anslutas till samma CAN-buss via ett CAN-delningskort.
Specifikation:
| DroneCAN M8N | |
| GNSS-mottagare | Ublox NEO M8N |
| Antal samtidiga GNSS | Upp till 3 GNSS (GPS, Galileo, GLONASS, BeiDou) |
| Processor | STM32G4 (170MHz, 512K FLASH) |
| Kompass | BMM150 |
| Frekvensband | GPS: L1C/A GLONASS: L10F Beidou: B1I Galileo: E1B/C |
| GNSS Augmentation System | SBAS: WAAS, EGNOS, MSAS, QZSS |
| Navigationsuppdatering | 5Hz Standard(10Hz MAX) |
| Noggrannhet | 2,5m |
| Hastighetsnoggrannhet | 0,05 m/s |
| Max antal satelliter | 22+ |
| Kommunikationsprotokoll | DroneCAN @ 1 Mbit/s |
| Stöder autopilot FW | PX4, Ardupilot |
| Porttyp | GHR-04V-S |
| Antenn | 25 x 25 x 4 mm keramisk patchantenn |
| Strömförbrukning | Mindre än 200mA vid 5V |
| Spänning | 4,7-5,2V |
| Driftstemperatur | -40~80C |
| Storlek | Diameter: 54 mm Tjocklek: 14,5 mm |
| Vikt | 36g |
| Kabellängd | 26cm |
| Övriga anteckningar | - LNA MAX2659ELT+ RF-förstärkare - Laddningsbar Farah-kapacitans - Lågbrus 3,3V-regulator |
För annan teknisk information, gå till https://docs.holybro.com/
DroneCAN
DroneCAN är det primära CAN-protokollet som används av ArduPilot- och PX4-projekten för kommunikation med CAN-kringutrustning. Det är ett öppet protokoll med öppen kommunikation, specifikation och flera öppna implementeringar.
DroneCAN-utveckling
DroneCAN-projektet har en aktiv utvecklingsgemenskap.
- diskussioner om discord på https://dronecan.org/discord
- utveckling på github på https://github.com/DroneCAN
Related Collections