Holybro Pixhawk 5X Autopilot Flight Controller
Holybro Pixhawk 5X Autopilot Flight Controller
HolyBro
Det gick inte att ladda hämtningstillgänglighet
Pixhawk® 5X är den senaste uppdateringen till den framgångsrika familjen Pixhawk® flygkontroller, baserade på Pixhawk® FMUv5X Open Standard och Pixhawk® Autopilot Bus Standard. Den kommer med den senaste PX4 Autopilot® förinstallerad, trippel redundans, temperaturkontrollerad, isolerad sensordomän, som levererar otrolig prestanda och tillförlitlighet.
Inuti Pixhawk® 5X kan du hitta en STMicroelectronics®-baserad STM32F7, ihopkopplad med sensorteknik från Bosch®, InvenSense®, vilket ger dig flexibilitet och tillförlitlighet för att styra alla autonoma fordon, lämplig för både akademiska och kommersiella tillämpningar . Pixhawk® 5X:s F7 mikrokontroller har 2MB flashminne och 512KB RAM. PX4 Autopilot drar fördel av den ökade kraften och RAM-minnet. Tack vare den uppdaterade processorkraften kan utvecklare bli mer produktiva och effektiva med sitt utvecklingsarbete, vilket möjliggör komplexa algoritmer och modeller.
Den öppna standarden FMUv5X inkluderar högpresterande, lågbrusiga IMU:er ombord, designade för bättre stabilisering. Trippel redundant IMU & dubbel redundant barometer på separata bussar. När PX4-autopiloten upptäcker ett sensorfel växlar systemet sömlöst till en annan för att bibehålla flygkontrollens tillförlitlighet.
En oberoende LDO driver varje sensorset med oberoende effektkontroll. En nydesignad vibrationsisolering för att filtrera bort högfrekventa vibrationer och minska buller för att säkerställa exakta avläsningar, vilket gör att fordon kan nå bättre totala flygprestanda. Extern sensorbuss (SPI5) har två chipvalslinjer och dataklara signaler för ytterligare sensorer och nyttolast med SPI-gränssnitt, och med ett integrerat Microchip Ethernet PHY (LAN8742AI-CZ-TR), höghastighetskommunikation med uppdragsdatorer via ethernet stöds nu. Två smarta batteriövervakningsportar (SMBus), stöd för INA226 SMBus Power-modul.
Pixhawk® 5X är perfekt för utvecklare vid företagsforskningslabb, startups, akademiker (forskning, professorer, studenter) och kommersiella tillämpningar. Pixhawk 5X är kompatibel med båda PX4 Autopilot & Ardupilot firmware.
Notera:
- Pixhawk 5X kräver I2C-protokoll för spännings- och strömdata från strömmodulen som t.ex PM02D, analog strömmodul (PM02, PM06, PM07) är inte kompatibla med Pixhawk 5X. Jämförelsetabell för kraftmoduler
- Den levereras med PX4 firmware som standard. Användaren kan också använda Ardupilot firmware genom att flasha firmware via Mission Planner eller QGroundControl.
Viktiga designpunkter
- Modulär flygkontroll: separerat IMU, FMU och bassystem anslutet med en 100-stifts och en 50-stifts Pixhawk® Autopilot Bus-kontakt, designad för flexibla och anpassningsbara system
- Redundans: 3x IMU-sensorer och 2x Barometersensorer på separata bussar, vilket möjliggör parallell och kontinuerlig drift även i händelse av ett hårdvarufel
- Trippel redundansdomäner: Helt isolerade sensordomäner med separata bussar och separat effektkontroll
- Vibrationsisoleringssystem för att filtrera bort högfrekventa vibrationer och minska brus för att säkerställa korrekta avläsningar
- Ethernet-gränssnitt för höghastighetsuppdragsdatorintegration
- Automatisk sensorkalibrering som eliminerar varierande signaler och temperatur
- IMU:er är temperaturkontrollerade av inbyggda värmemotstånd, vilket möjliggör optimal arbetstemperatur för IMU:er
Teknisk specifikation
- FMU-processor: STM32F765
- 32 Bit Arm® Cortex®-M7, 216MHz, 2MB minne, 512KB RAM
- IO-processor: STM32F100
- 32 Bit Arm® Cortex®-M3, 24MHz, 8KB SRAM
- Sensorer ombord
- Accel/Gyro: ICM-20649 (hårt monterad)
- Accel/Gyro: ICM-42688P (mjukt monterad)
- Accel/Gyro: ICM-20602 eller BMI088 (Mjukt monterad)
- Mag: BMM150
- Barometer: 2x BMP388
Elektriska data
- Spänningsvärden:
- Max inspänning: 6V
- USB-strömingång: 4,75~5,25V
- Servo Rail Ingång: 0~36V
Gränssnitt
- 16- PWM servoutgångar
- R/C-ingång för Spektrum / DSM
- Dedikerad R/C-ingång för PPM och S.Bus-ingång
- Dedikerad analog/PWM RSSI-ingång och S.Bussutgång
- 4 seriella portar för allmänna ändamål
- 3 med full flödeskontroll
- 1 med separat 1A strömgräns
- 1 med I2C och extra GPIO-linje för extern NFC-läsare
- 2 GPS-portar
- 1 hel GPS plus säkerhetsbrytarport
- 1 grundläggande GPS-port
- 1 I2C-port
- 1 Ethernet-port
- Transformatorlösa applikationer
- 100 Mbps
- 1 SPI-buss
- 2 markervalslinjer
- 2 dataklara rader
- 1 SPI SYNC-linje
- 1 SPI-återställningslinje
- 2 CAN-bussar för CAN-tillbehör
- CAN Bus har individuella tysta kontroller eller ESC RX-MUX-kontroll
- 2 strömingångsportar med SMBus
- 1 AD & IO-port
- 2 extra analoga ingångar
- 1 PWM/Capture-ingång
- 2 dedikerade felsöknings- och GPIO-linjer
Mekaniska data
- Mått
- Flygkontrollmodul: 38,8 x 31,8 x 14,6 mm
- Mini bastavla: 43,4 x 72,8 x 14,2 mm
- Standard Baseboard v1: 52,4 x 103,4 x 16,7 mm
- Standard Baseboard v2A: 40,2 x 92,3 x 18,4 mm
- Standard Baseboard v2B: 40,2 x 98,3 x 16,9 mm
- Vikt
- Flygkontrollmodul: 23g
- Mini bastavla: 26.8g
- Standard Baseboard v1: 51g
- Standard Baseboard v2A: 58g
- Standard Baseboard v2B: 58g
SKU 11045 inkluderar:
- Pixhawk 5X flygkontrollmodul
SKU 20307/SKU 20320/SKU20310 inkluderar:
- Pixhawk 6X flygkontrollmodul
- Standard Baseboard v2A/v2B eller Mini Baseboard
- PM02D HV Power Modul
- Kabelsats
- Pixhawk 6X flygkontrollmodul
- Standard Baseboard v2A/v2B eller Mini Baseboard
- PM02D HV Power Modul
- Kabelsats
- M9N/M10 GPS
Pixhawk mini, Pixhawk Baseboard v1 och två varianter av Pixhawk Baseboard v2 (v2A och v2B) visas med mått. Mini är 43,4 x 72,8 mm, v1 är 52 x 101,90 mm, v2A är 40,2 x 92,3 mm och v2B är 40,2 x 98,3 mm.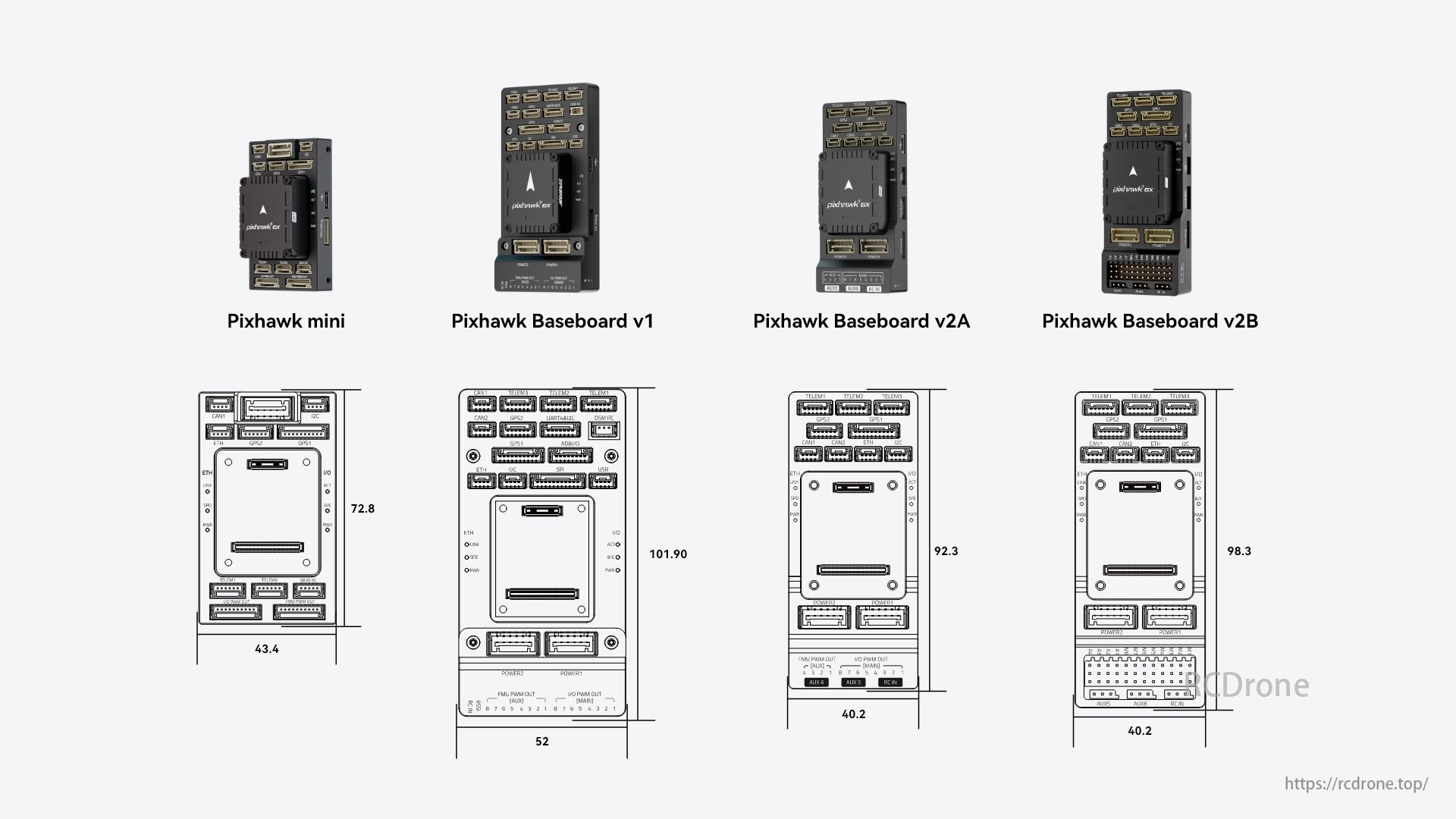
Kabelprovsguide

Holybro Pixhawk 5X-diagram inkluderar primära och sekundära GPS, UART4 & I2C-portar, CAN1 & 2, DSM RC-mottagare, telemetriradio, HD FPV IP-kamera, batteri, strömmodul, ESC:er och ett strömfördelningskort.
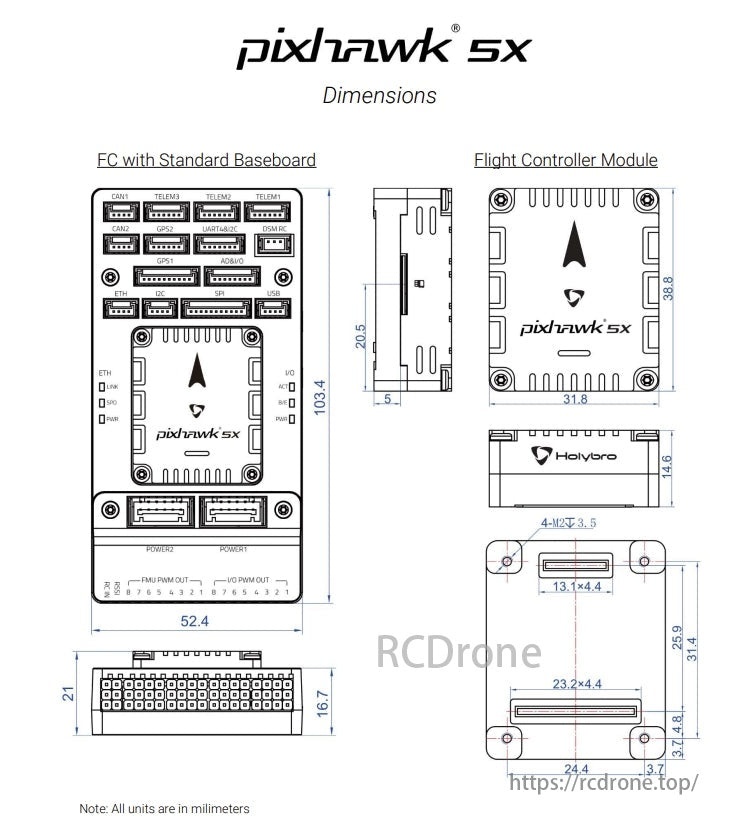
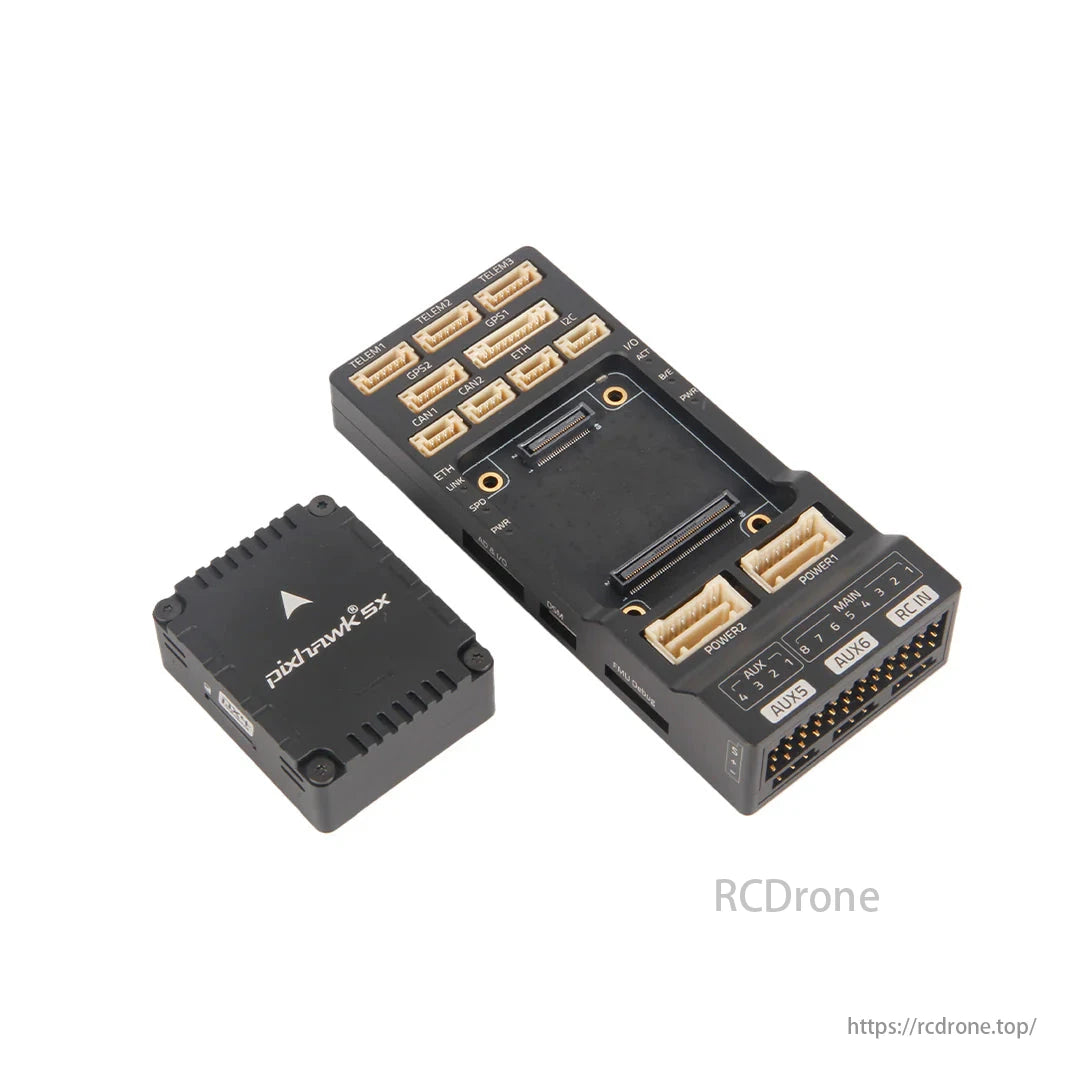
Pixhawk SX dimensioner inkluderar en flygkontrollmodul och FC med standard bottenplatta. Modulen mäter 31,8 x 38,8 mm, medan bottenplattan är 103,4 x 52,4 mm. Alla enheter är i millimeter.

Standardmått på basplattan: 103,4 x 58 x 10,7 mm, med olika portar och kontakter inklusive USB, Ethernet och strömingångar.


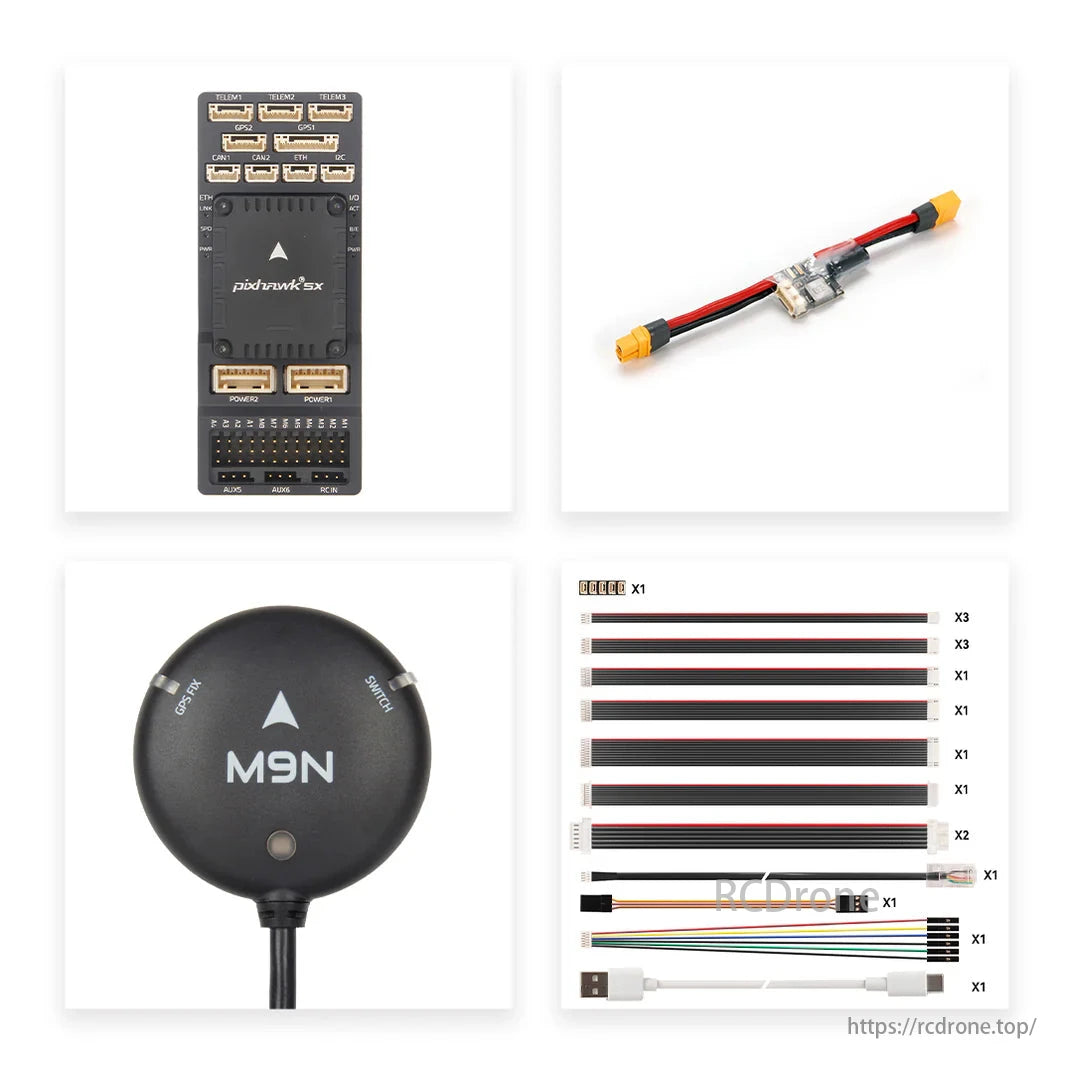
Pixhawk 5X flygkontroll med TELEM1-3, GPS1-2, CAN1-2, ETH, I2C, POWER1-2, AUX5-6 och RC IN-portar.
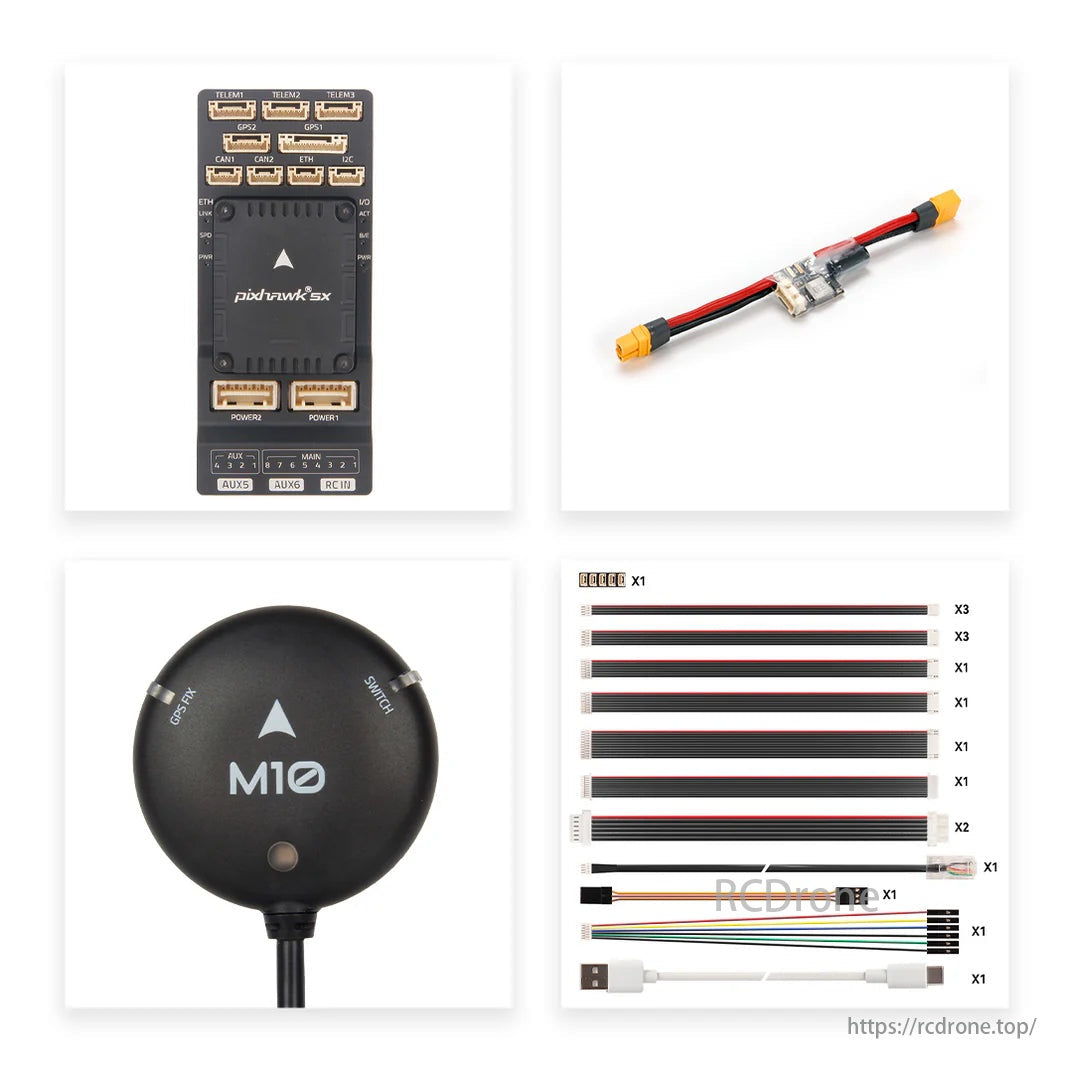
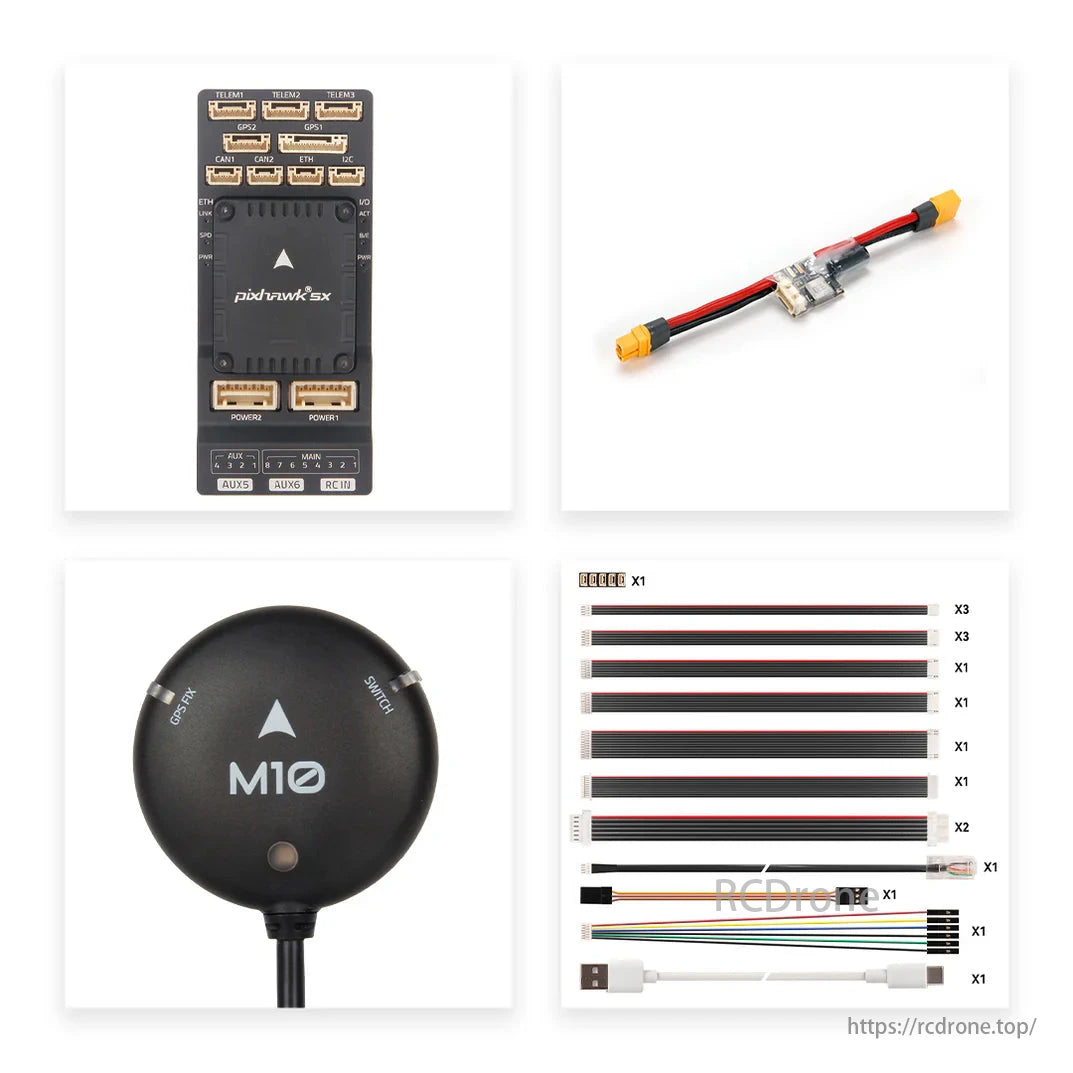
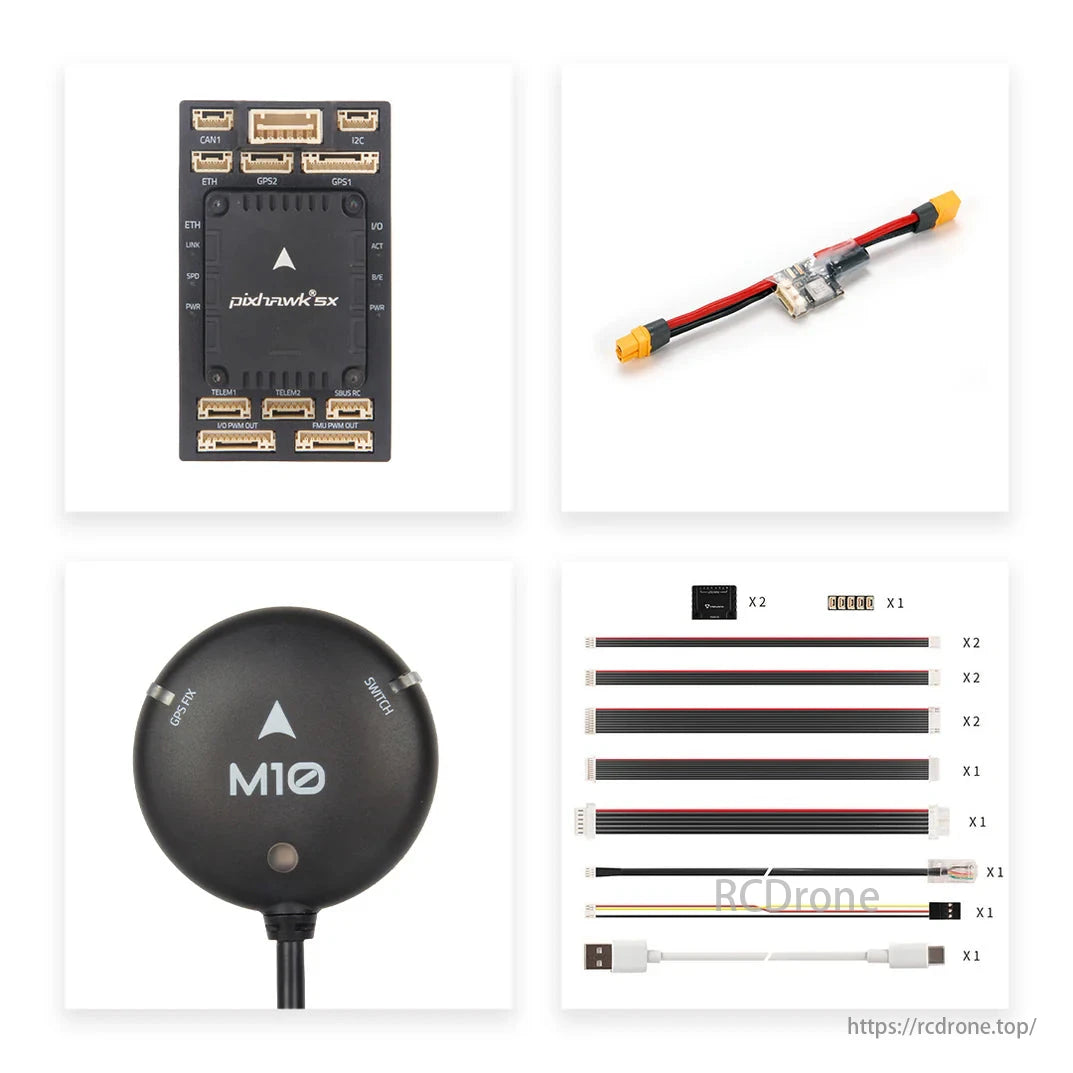
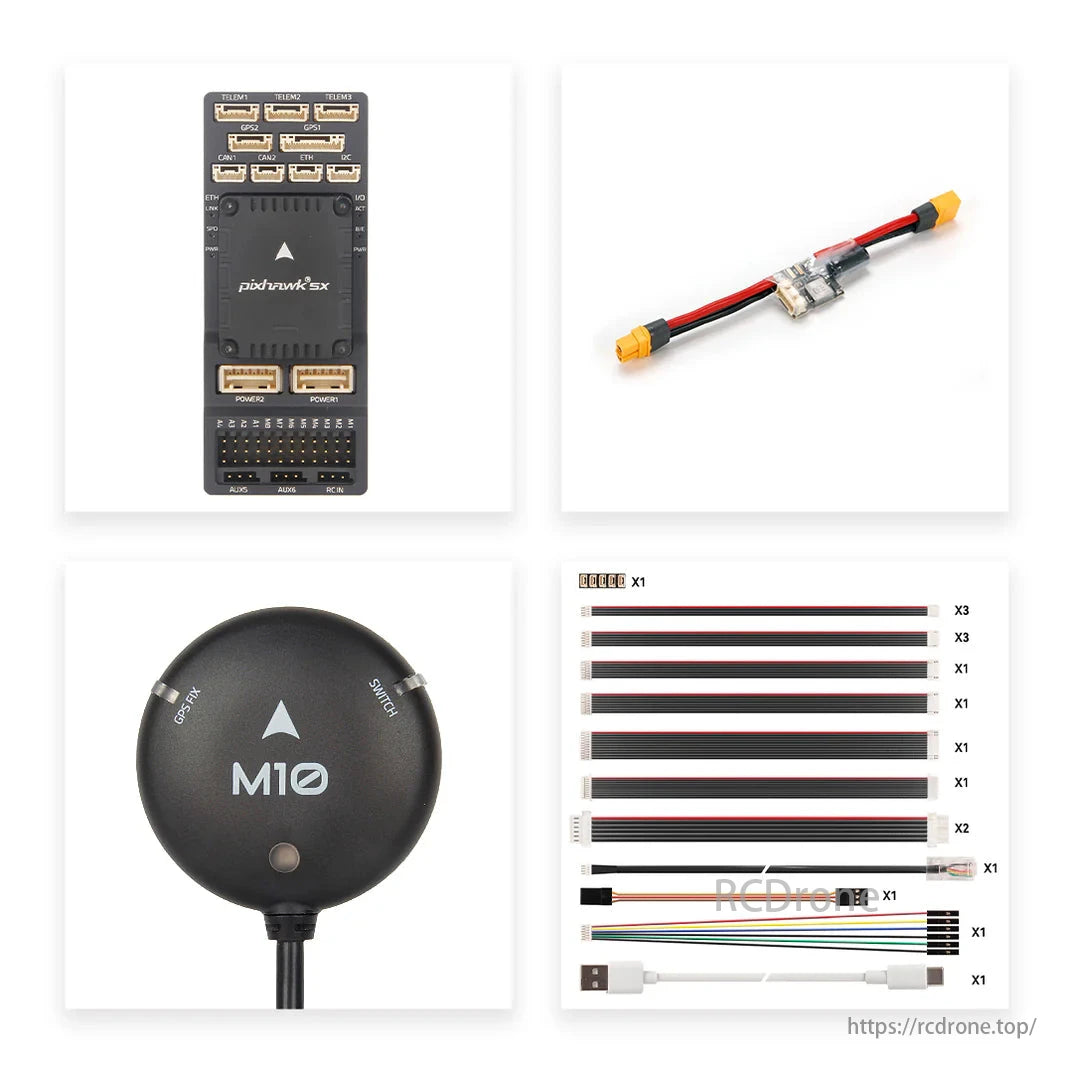
Pixhawk 5X flygkontroll, M10 GPS-modul, kraftmodul och olika kablar för drönarmontage.