Holybro Pixhawk 6X (ICM-45686) Flygkontroller – Trippel redundant IMU, STM32H753, Ethernet, Kompatibel med PX4 & ArduPilot
Holybro Pixhawk 6X (ICM-45686) Flygkontroller – Trippel redundant IMU, STM32H753, Ethernet, Kompatibel med PX4 & ArduPilot
HolyBro
Det gick inte att ladda hämtningstillgänglighet
Översikt
Holybro Pixhawk 6X (ICM-45686) är en högpresterande, modulär autopilot flygkontroller designad för krävande industriella och kommersiella drönarapplikationer. Med trippelredundanta ICM-45686 IMU:er med BalancedGyro™ teknik, dubbla barometrar och en STM32H753-processor som körs på 480 MHz, levererar Pixhawk 6X oöverträffad tillförlitlighet, realtidsprestanda och flexibilitet. Dess modulära arkitektur, avancerad vibrationsisolering och Ethernet-gränssnitt gör den idealisk för UAV-system som kräver robust kontroll, precision och uppdragsanpassning.
Nyckelfunktioner
-
Tredubbel IMU Redundans: 3x ICM-45686 IMUs (±32g) med BalancedGyro™-teknologi för felfri inertialnavigation
-
Dubbla Barometrar: ICP20100 och BMP388 för förbättrad höjdnoggrannhet
-
Högpresterande Processor: STM32H753 Cortex-M7, 480MHz, med 2MB Flash & 1MB RAM
-
Modulär Design: Separera FMU, IMU och baskort, anslutna via 100-pin & 50-pin Pixhawk® Bus
-
Temperaturkontrollerat IMU-kort: Säkerställer optimal sensorprestanda över temperaturintervall
-
Ethernet-integration: Stöder hög hastighetskommunikation med uppdragsdatorer
-
Digitalt Strömmodulstöd: Levererar mer exakta spännings- och strömavläsningar
Avancerat isoleringssystem: Hållbart, specialformulerat material ger högspektral vibrationsdämpning
-
Firmware-kompatibilitet: Levereras med PX4 (v1.14.3+), stöder ArduPilot (v4.5.0+)
Specifikationer
Processorer & Sensorer
| Komponent | Detaljer |
|---|---|
| FMU-processor | STM32H753, ARM Cortex-M7, 480MHz, 2MB Flash, 1MB RAM |
| IO-processor | STM32F103, ARM Cortex-M3, 72MHz |
| IMU-sensorer | 3x ICM-45686 (BalancedGyro™) |
| Barometer | ICP20100 & BMP388 |
| Magnetometer | BMM150 |
| Säkerhetskomponent | NXP SE050 Plug & Trust |
Elektriska parametrar
| Parameter | Value |
|---|---|
| Max ingångsspänning | 6V |
| USB ström-ingång | 4.75~5.25V |
| Servoskenans spänning | 0~36V |
| Telem1 & GPS2 strömgräns | 1.5A sammanlagt |
| Övriga portar strömgräns | 1.5A sammanlagt |
| PWM-signalens spänning | Standard 3.3V (kan växlas till 5V via resistor) |
| Driftstemperatur | -25°C till +85°C |
Mechaniska dimensioner & vikt
| Komponent | Dimensioner (mm) | Vikt (g) |
|---|---|---|
| Flygkontroller | 38.8 x 31.8 x 16.8 | 31.3g |
| Standard basplatta | 52.4 x 102 x 16.7 | 72.5g |
| Mini Basplatta | 43.4 x 72.8 x 14.2 | 26.5g |
Firmware Kompatibilitet
-
PX4: Fullt stöd från version 1.14.3 och uppåt
-
ArduPilot: Fullt stöd från version 4.5.0 och över
-
Firmware-flashning stöds via Mission Planner eller QGroundControl
Tillämpningar
Ideal för integration i:
-
Industriella drönare
-
Kommersiella UAV-system
-
VTOL-flygplan
-
Akademiska forskningsplattformar
-
Multi-sensor och högreliabilitetsuppdrag
Detaljer

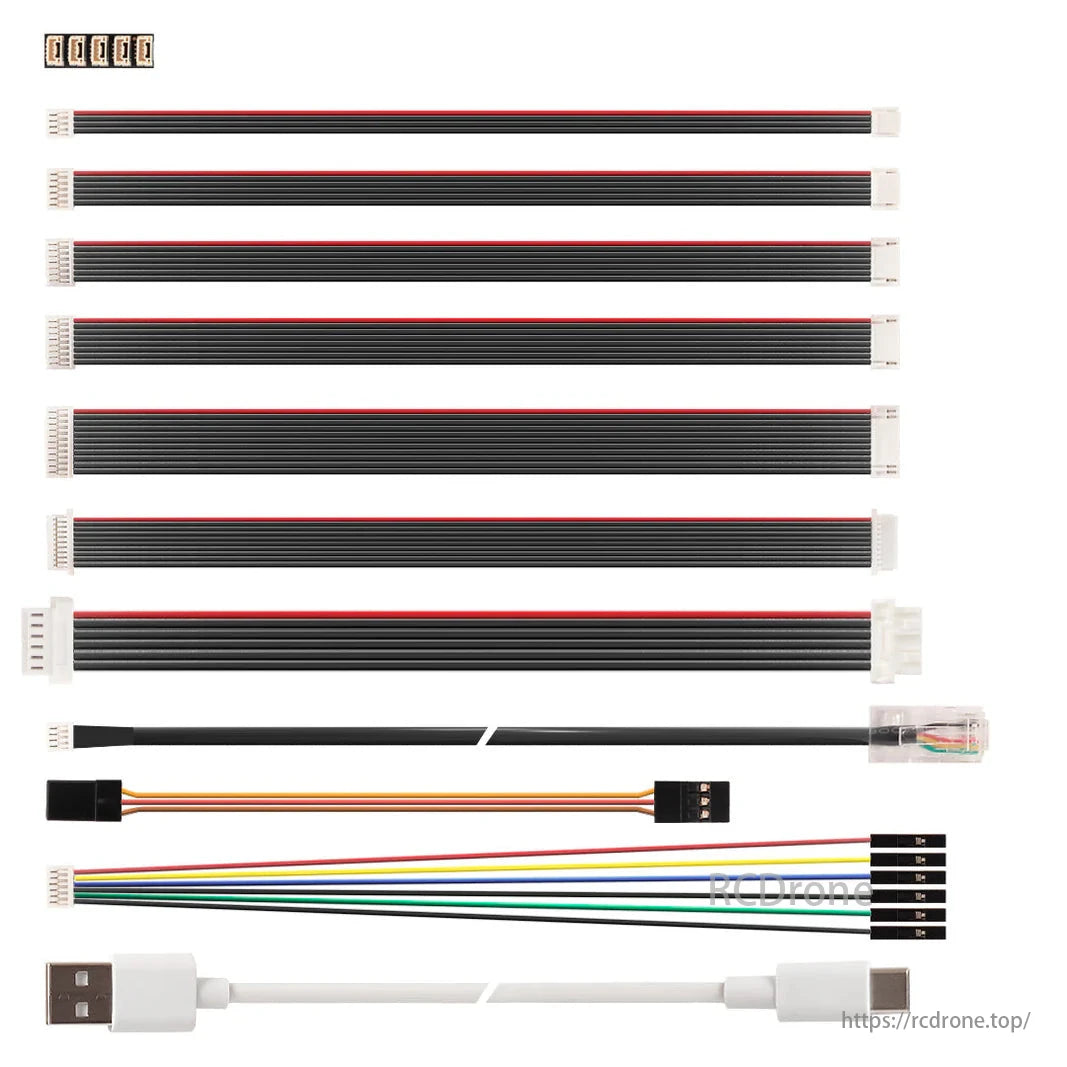
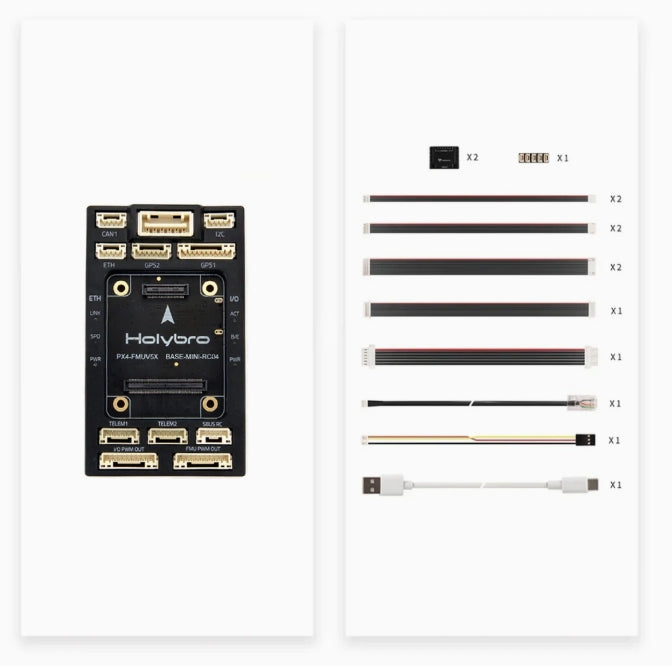
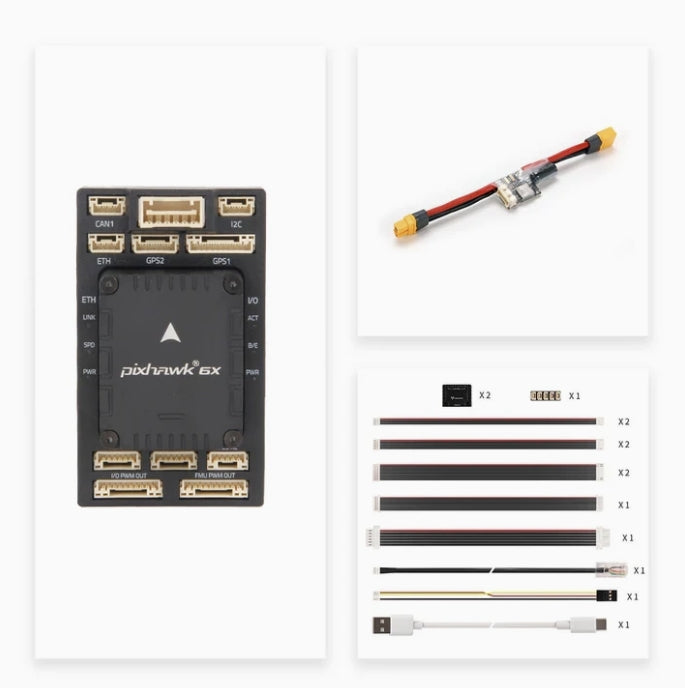
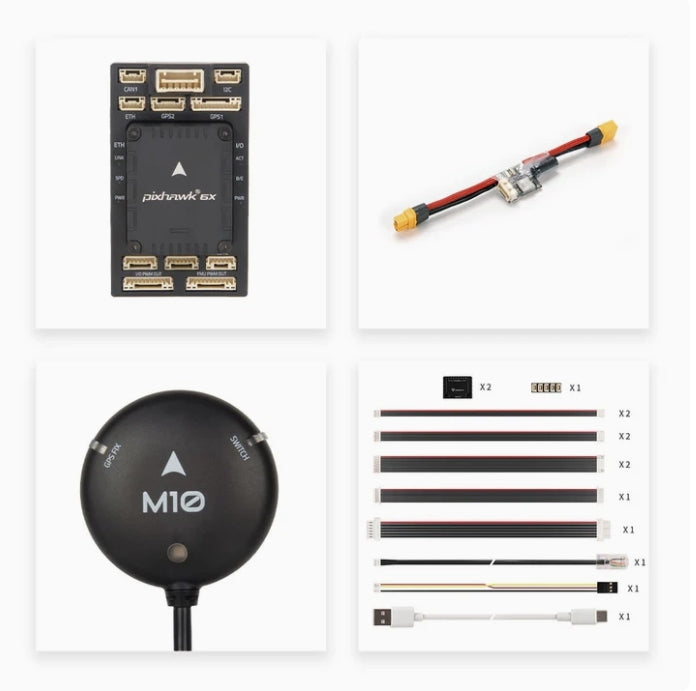
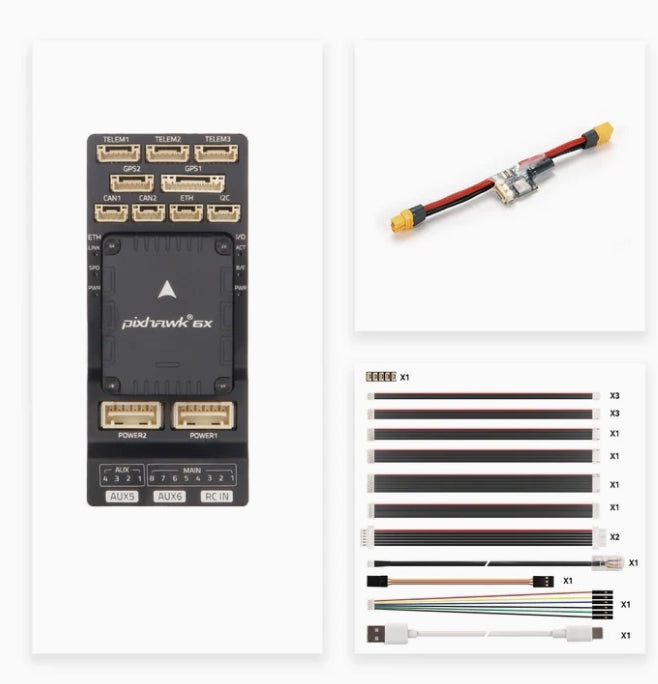
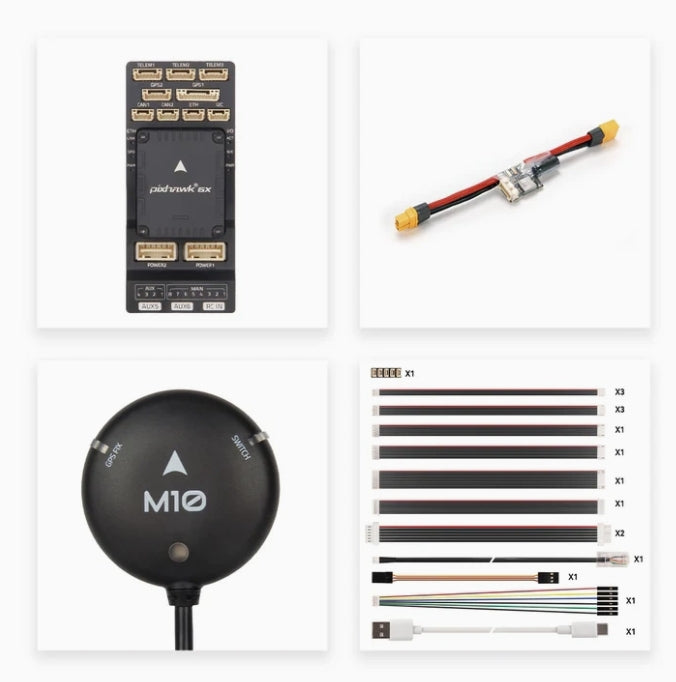
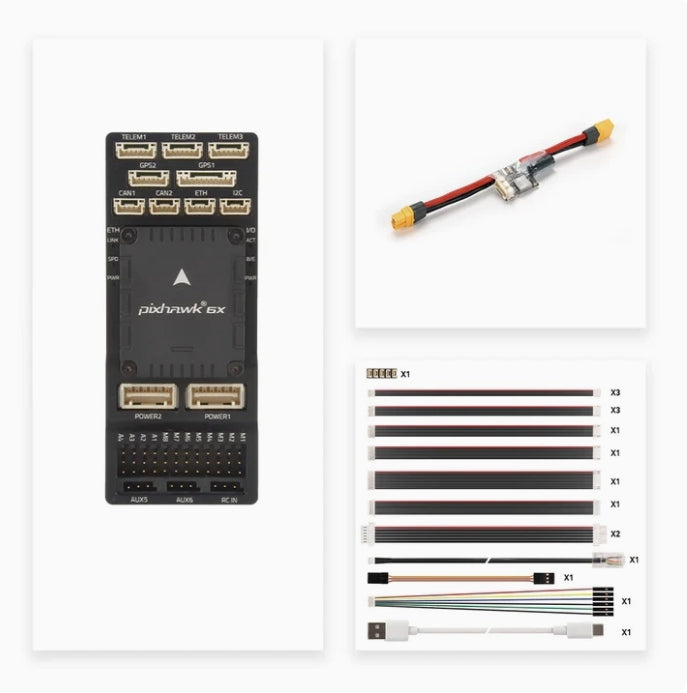
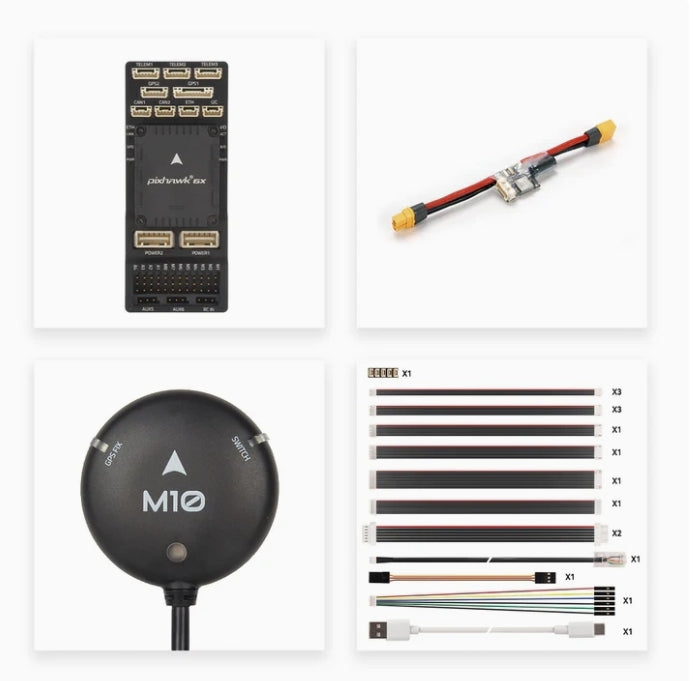
Pixhawk 6X erbjuder en smalare design med två modeller. Den har en förbättrad pin-header för bättre anslutning och prestanda, vilket gör den idealisk för avancerade tillämpningar. Välj rätt modell för dina behov.
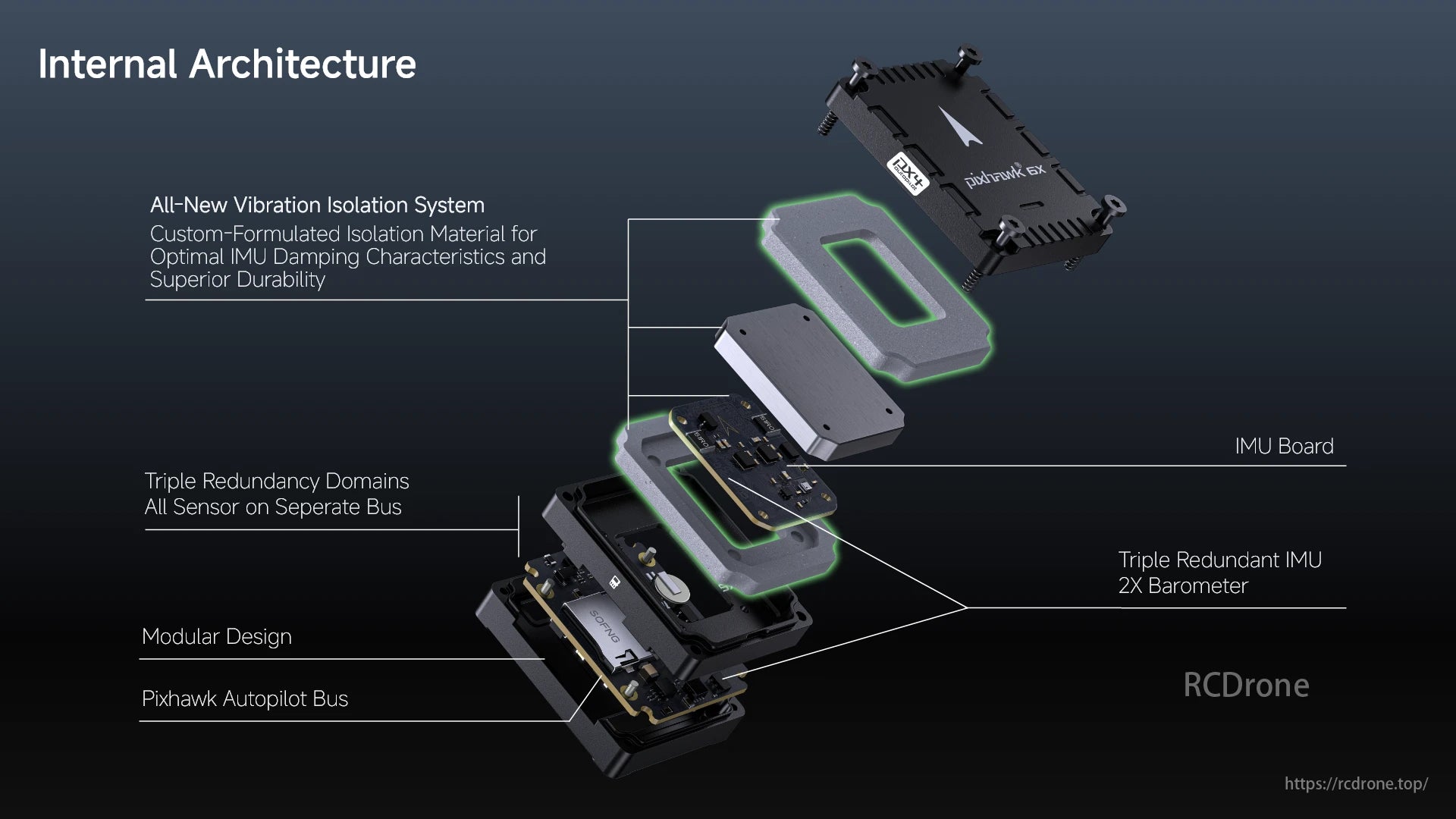
Holybro Pixhawk 6X erbjuder vibrationsisolering, trippel redundans, modulär design, autopilotbuss, IMU-kort och 2x barometer för avancerad prestanda.
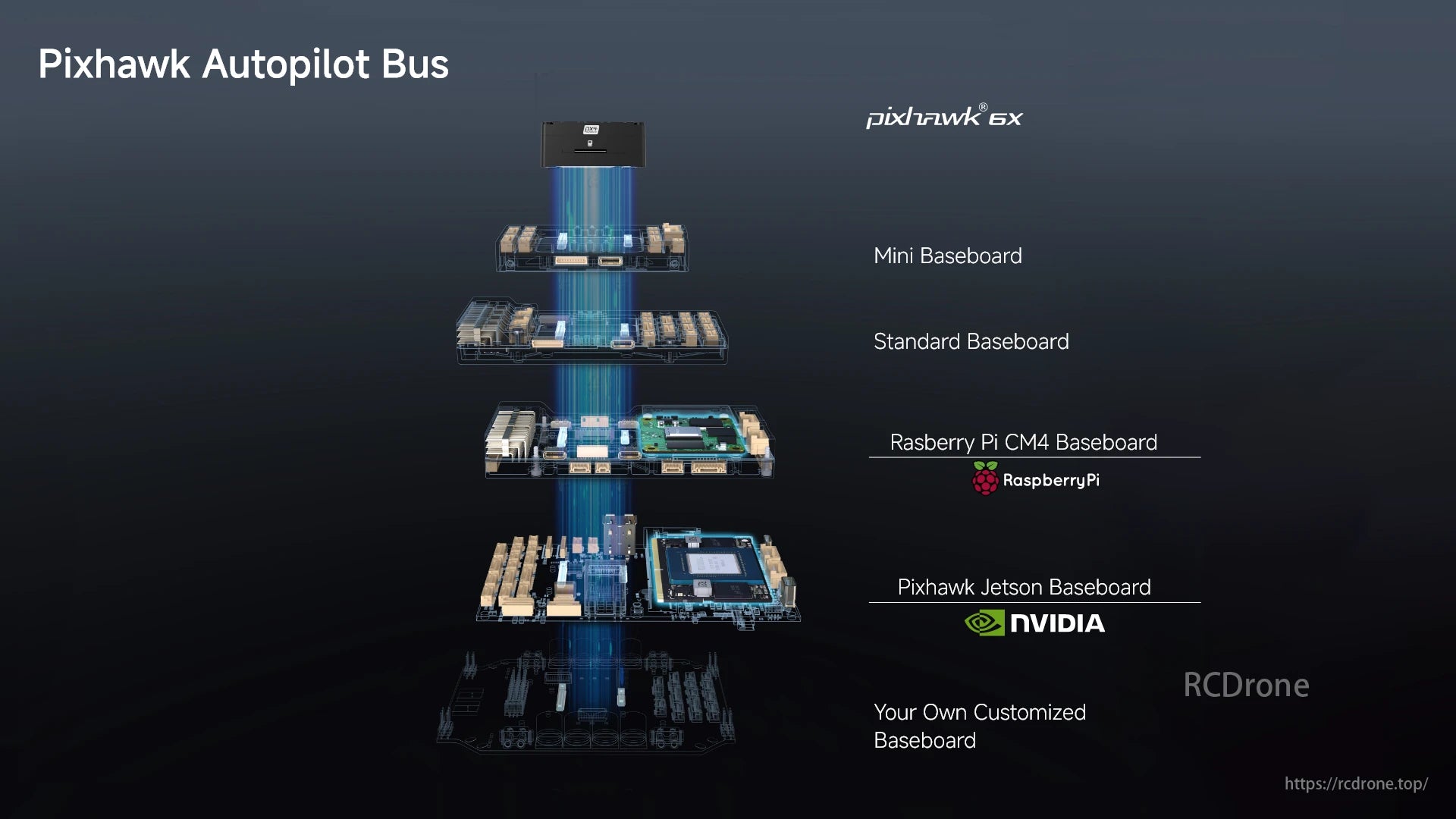
Pixhawk Autopilotbuss inkluderar Pixhawk 6X, Mini Basenhet, Standard Basenhet, Raspberry Pi CM4 Basenhet, Jetson Basenhet och anpassade alternativ.

Temperaturkompensationsmotstånd, redundant IMU & barometer, olika sensorteknologier och isoleringsmaterial säkerställer noggrannhet.

Pixhawk Autopilotbuss, STM H753 32-Bit Processor (480 MHz), Invensense ICM45686 IMU med BalancedGyro-teknologi och NXP EdgeLock SE050 Säkerhetskomponent är integrerade i FMU-kortet.
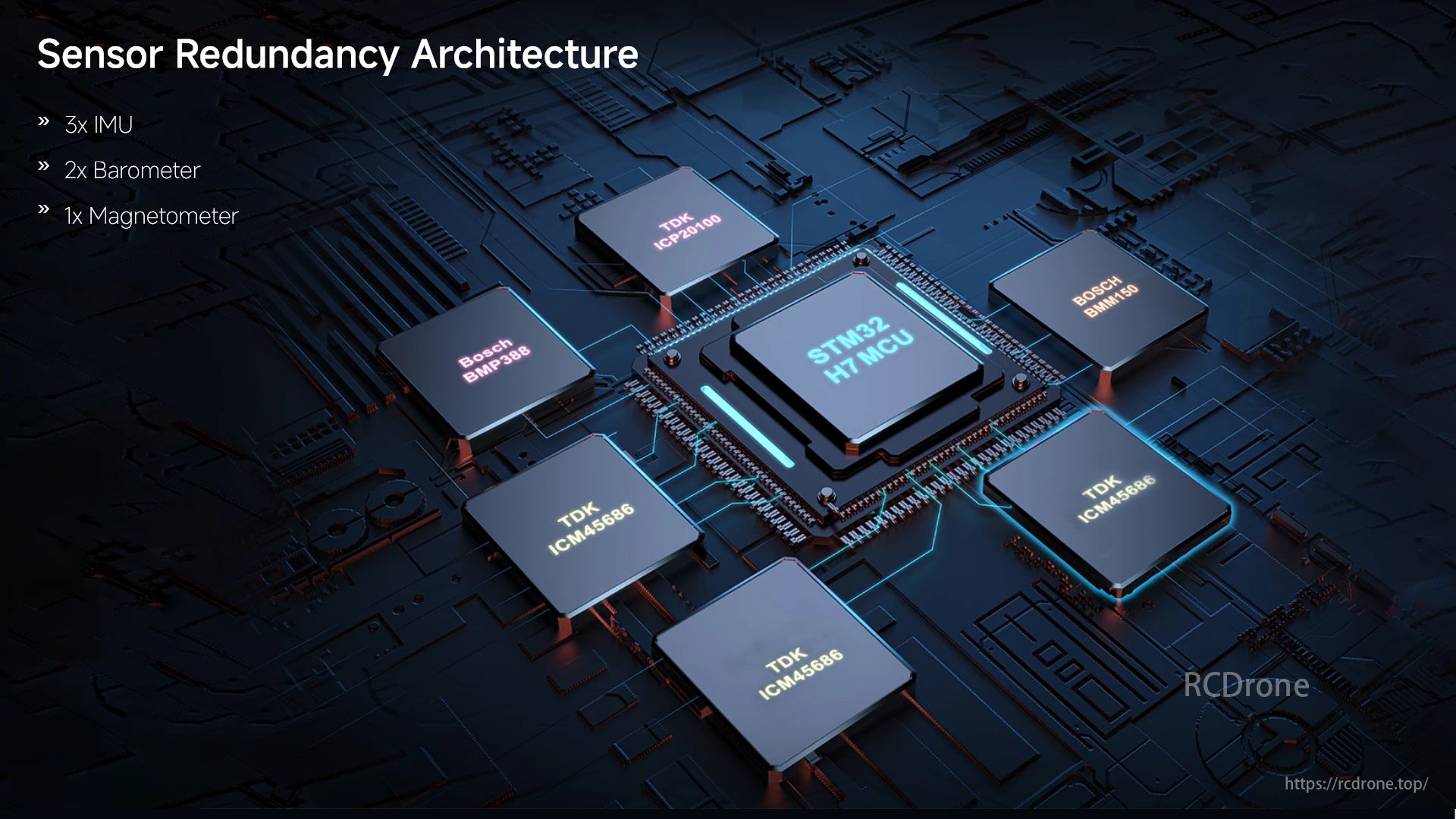
Sensorredundansarkitektur med 3x IMU, 2x barometer och 1x magnetometer.Funktioner STM32 H7 MCU, TDK ICM-45686, Bosch BMP388 och BMM50 sensorer för förbättrad prestanda.
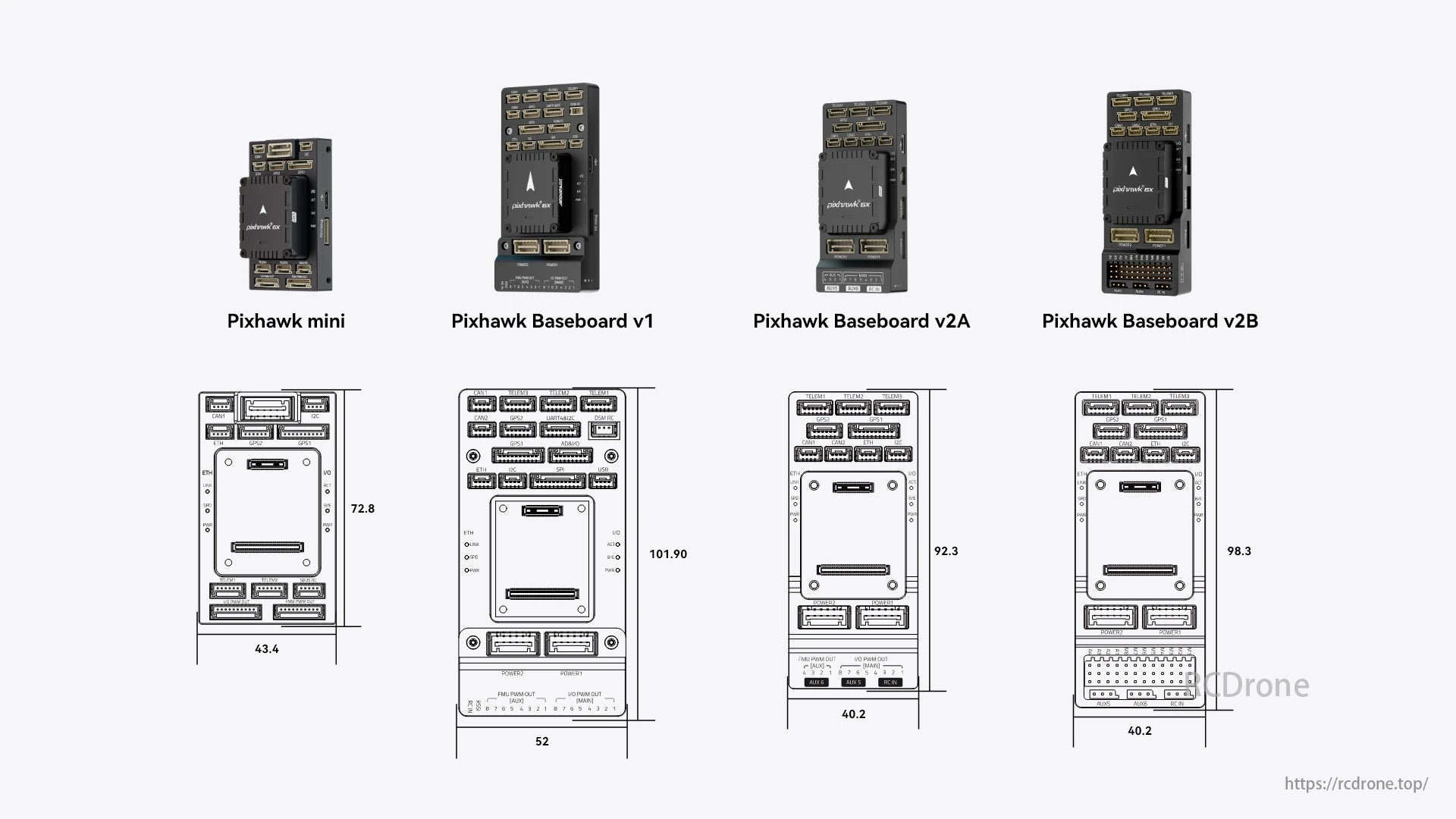
Pixhawk mini, Baseboard v1, v2A och v2B flygkontroller med dimensioner: 43.4x72.8, 52x101.90, 40.2x92.3 och 40.2x98.3 respektive. Olika portar och kontakter är synliga på varje modell.
Related Collections