Holybro Pixhawk 6X Pro Autopilot Flight Controller
Holybro Pixhawk 6X Pro Autopilot Flight Controller
HolyBro
Det gick inte att ladda hämtningstillgänglighet
Nyckeldesignpunkt
- Högpresterande ADIS16470 Industrial IMU med högt dynamiskt omfång för accelerometer (±40 g), perfekt för exakt rörelseavkänning i krävande UAV-applikationer
- Helt nytt avancerat hållbart vibrationsisoleringsmaterial med resonansfrekvens i det högre spektrumet, idealiskt för industriella och kommersiella drönarapplikationer
- Trippel redundant IMU & dubbel redundant barometer på separata bussar
- Högpresterande STM32H753-processor
- Modulär flygkontroller: separerat IMU, FMU och bassystem
- Säkerhetsdriven design innehåller sensorer från olika tillverkare och modellserier
- Oberoende LDO driver varje sensor med oberoende effektkontroll.
- Ethernet-gränssnitt för höghastighetsuppdragsdatorintegration. Transformatorlös kan uppnås med 50 Ohm termineringsmotstånd vid målenheten (AN2190 50 Ohm avslutning).
- Temperaturkontrollerat IMU-kort, tillåter optimal arbetstemperatur för IMU
- Hårdvaruomkopplingsbart 3,3V eller 5V signalläge (kräver modifiering av baskortet)
Notera:
- FC-modul + en bottenplatta krävs för att denna produkt ska fungera. En FC-modul eller en basplatta fungerar inte i sig själv.
Specifikation
Processorer och sensorer
- FMU-processor: STM32H753
- 32 Bit Arm® Cortex®-M7, 480MHz, 2MB flashminne, 1MB RAM
- IO-processor: STM32F103
- 32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM
- Sensorer ombord
- Accel/Gyro: ADIS16470
- ±40g, Vibrationsisolerad, industriell IMU
- Accel/Gyro: IIM-42652
- ±16g, Vibrationsisolerad, industriell IMU
- Accel/Gyro: ICM-45686 med BalancedGyro™-teknik
- ±32g, hårdmonterad
- Barometer: ICP20100
- Barometer: BMP388
- Mag: BMM150
- Accel/Gyro: ADIS16470
- NXP EdgeLock SE050 Plug & Trust hårdvarusäkra element
Elektriska data
- Spänningsvärden:
- Max inspänning: 6V
- USB-strömingång: 4,75~5,25V
- Servo Rail Ingång: 0~36V
- Aktuella betyg:
- Telem1 utgångsströmbegränsare: 1,5A
- Alla andra portar kombinerad utgångsströmbegränsare: 1,5A
- Driftstemperatur: -25-85°C
Mekaniska data
- Mått
- Flygkontrollmodul: 38,8 x 31,8 x 30,1 mm
- Standard bottenplatta: 52,4 x 102 x 16,7 mm (Aluminium)
- Mini Baseboard: 43,4 x 72,8 x 14,2 mm
- Vikt
- Flygkontrollmodul: 50g
- Standard bottenplatta: 72,5g (Aluminium)
- Mini bastavla: 26.5g
Paketet inkluderar
FC-modulen inkluderar endast:
- Pixhawk 6X Pro Flight Controller Module
- Valfritt IMU-dämpningsbyte (mjukare än förinstallerat)
Standard V2A/V2B/Mini Set innehåller:
- Pixhawk 6X Pro Flight Controller Module
- Pixhawk Standard Baseboard v2A/ Pixhawk Standard Baseboard v2B/ Mini bastavla
- PM02D HV Power Modul
- Kabelsats
Detaljer
Helt ny design för vibrationsisolering
Denna nya vibrationsisoleringsdesign använder ACsedvanligt formulerat hållbart silikonbaserat isoleringsmaterial i stället för den traditionella skumdesignen. Bmed hjälp av omfattande forskning och utveckling och testning erbjuder den optimala IMU-dämpningsegenskaper med resonansfrekvens i det högre spektrumet, perfekt för industriella och kommersiella drönare
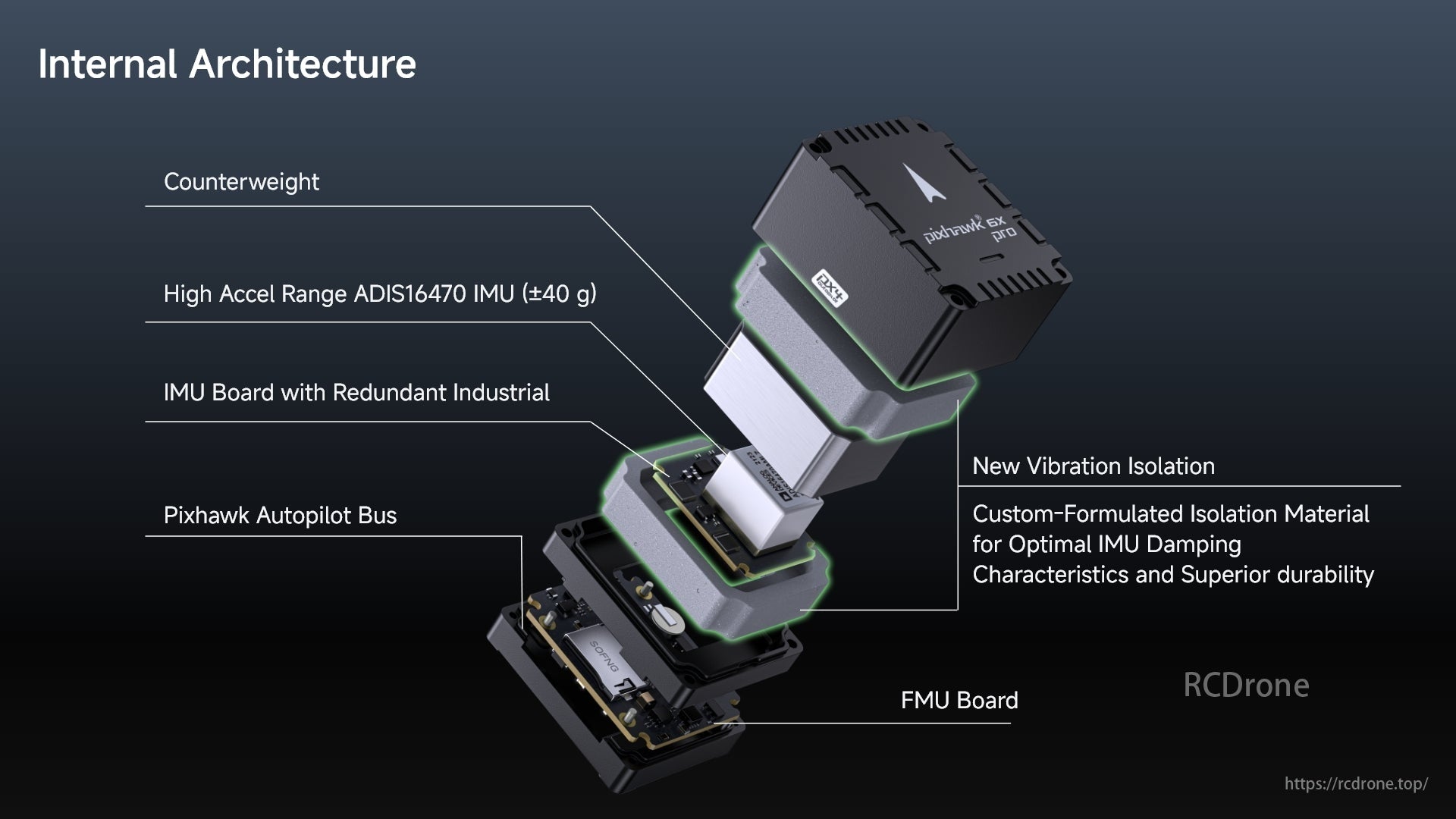
Intern arkitektur: Motvikt, High Accel Range ADIS16470 IMU (±40 g), Redundant Industrial IMU Board, Pixhawk Autopilot Bus, New Vibration Isolation, FMU Board.
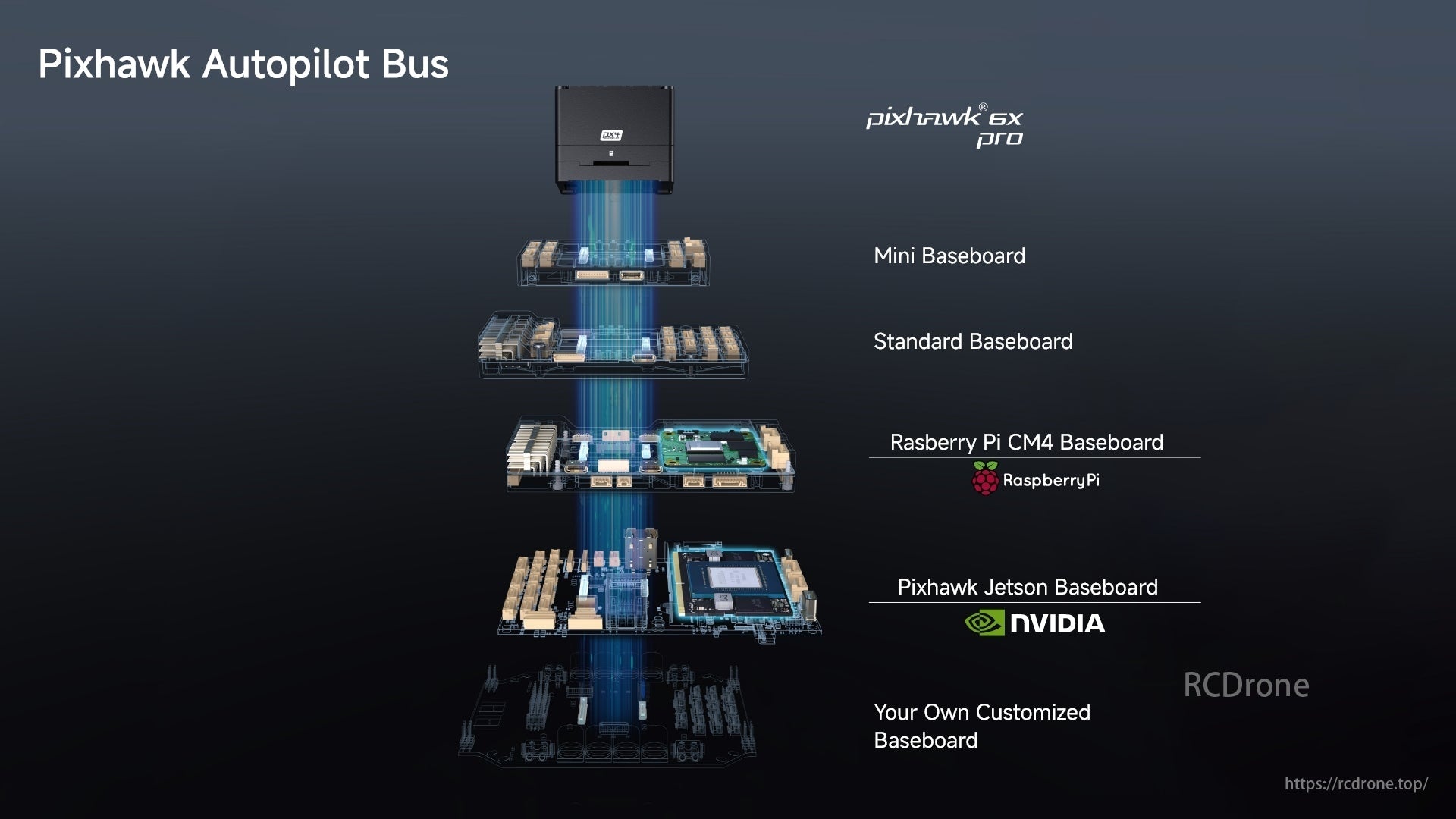
Pixhawk Autopilot Bus ansluter Mini, Standard, Raspberry Pi CM4, Jetson Baseboards och anpassade baseboards.
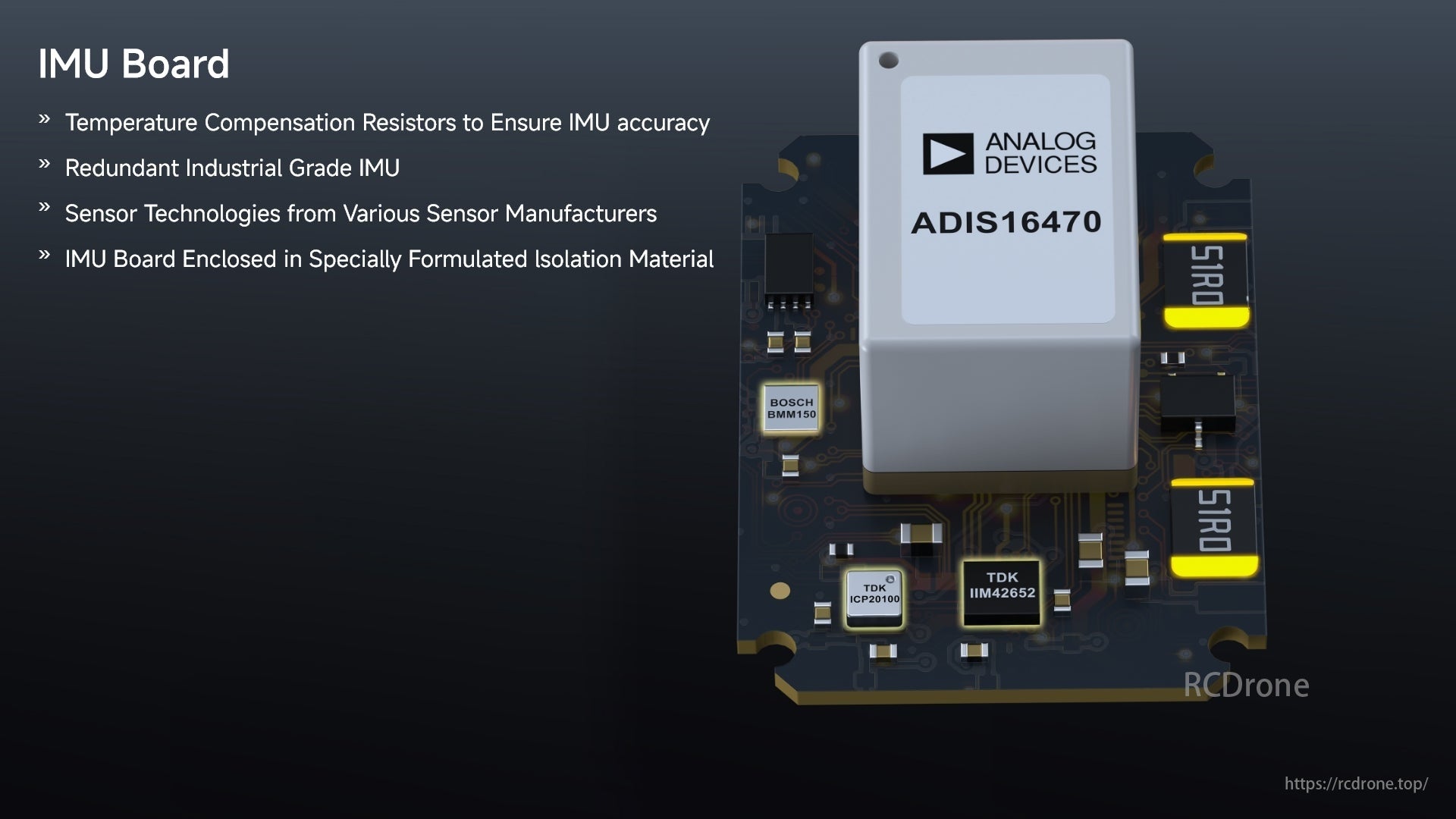
IMU Board har temperaturkompensationsmotstånd, redundant industriell IMU, sensorer från olika tillverkare och är inneslutet i isoleringsmaterial.
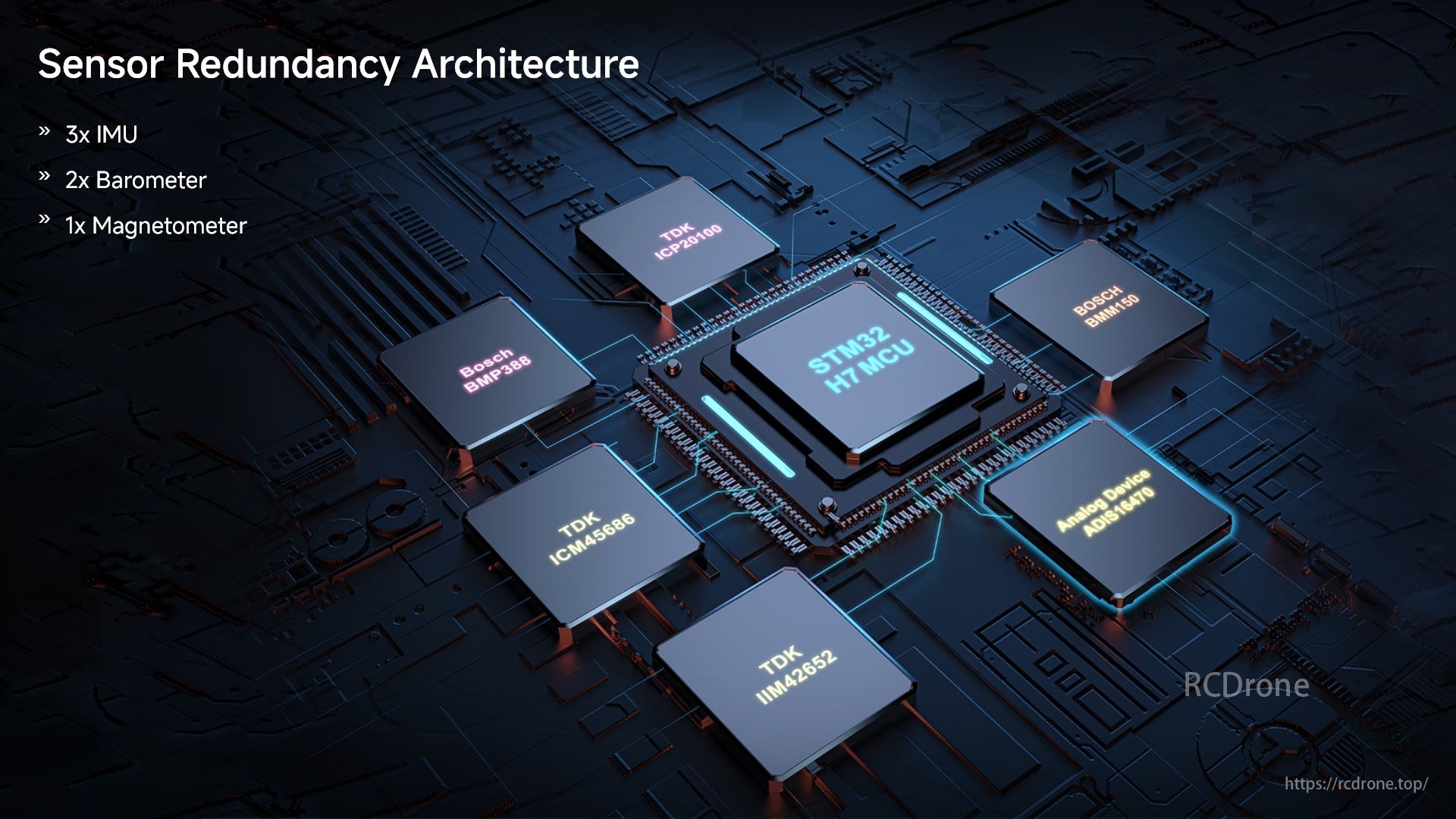
Sensorredundansarkitektur inkluderar 3x IMU, 2x Barometer och 1x Magnetometer, med komponenter som STM32 H7 MCU, TDK ICs, Bosch BMP388 och Analog Devices ADIS16470.
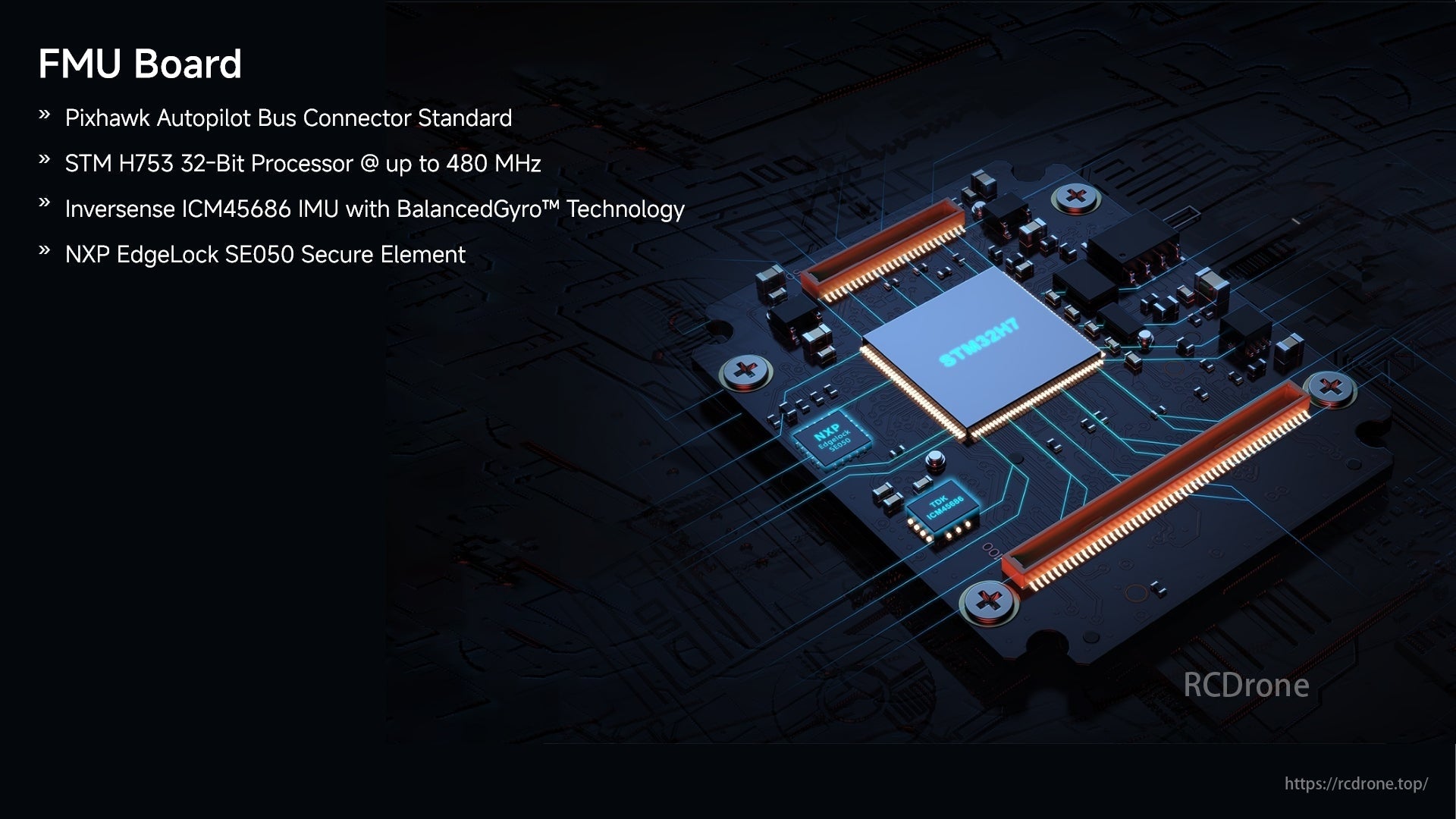
FMU-kortet har Pixhawk Autopilot Bus Connector Standard, STM H753 32-bitars processor upp till 480 MHz, Inversense ICM45686 IMU med BalancedGyro Technology och NXP EdgeLock SE050 Secure Element.
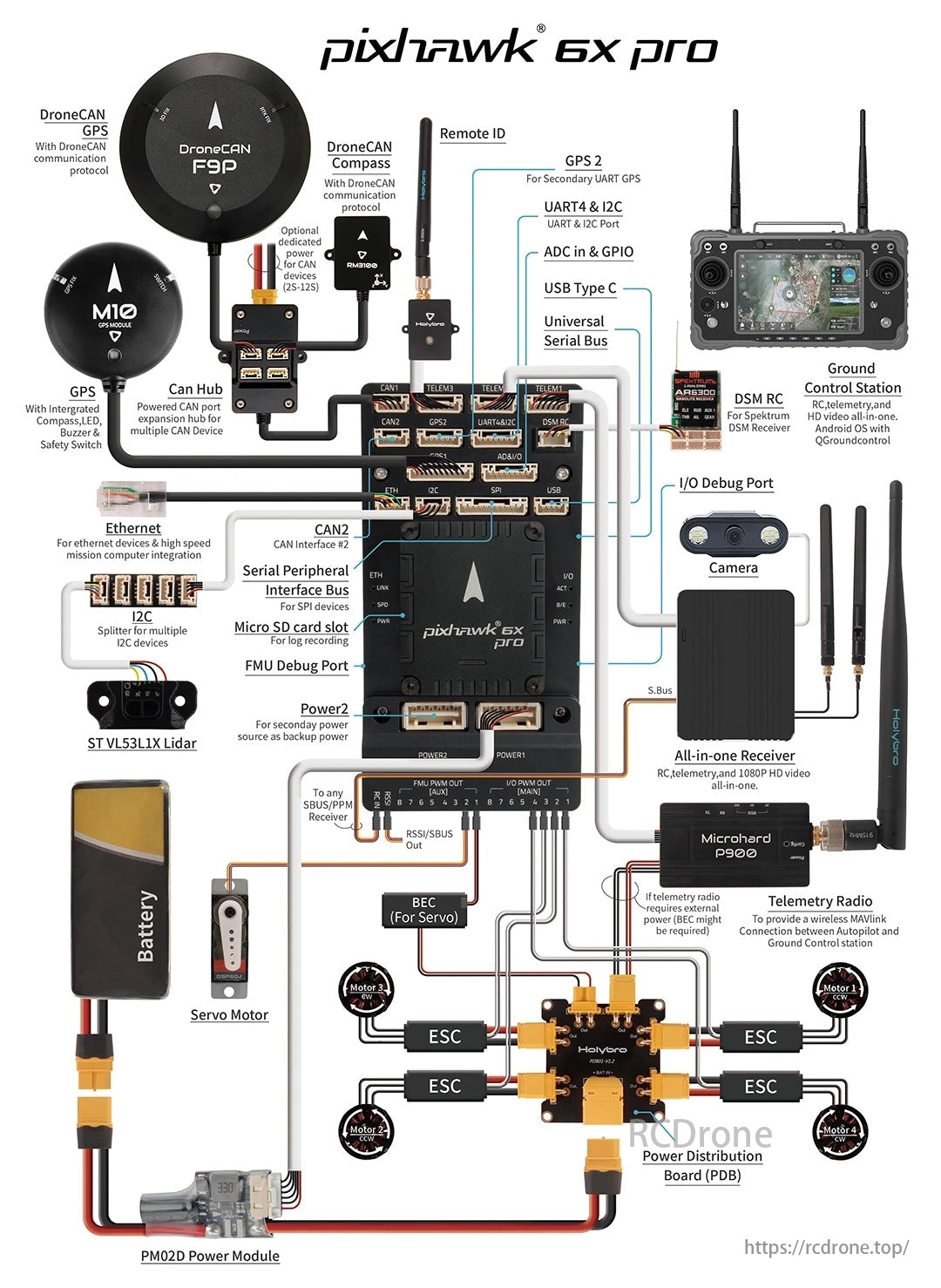
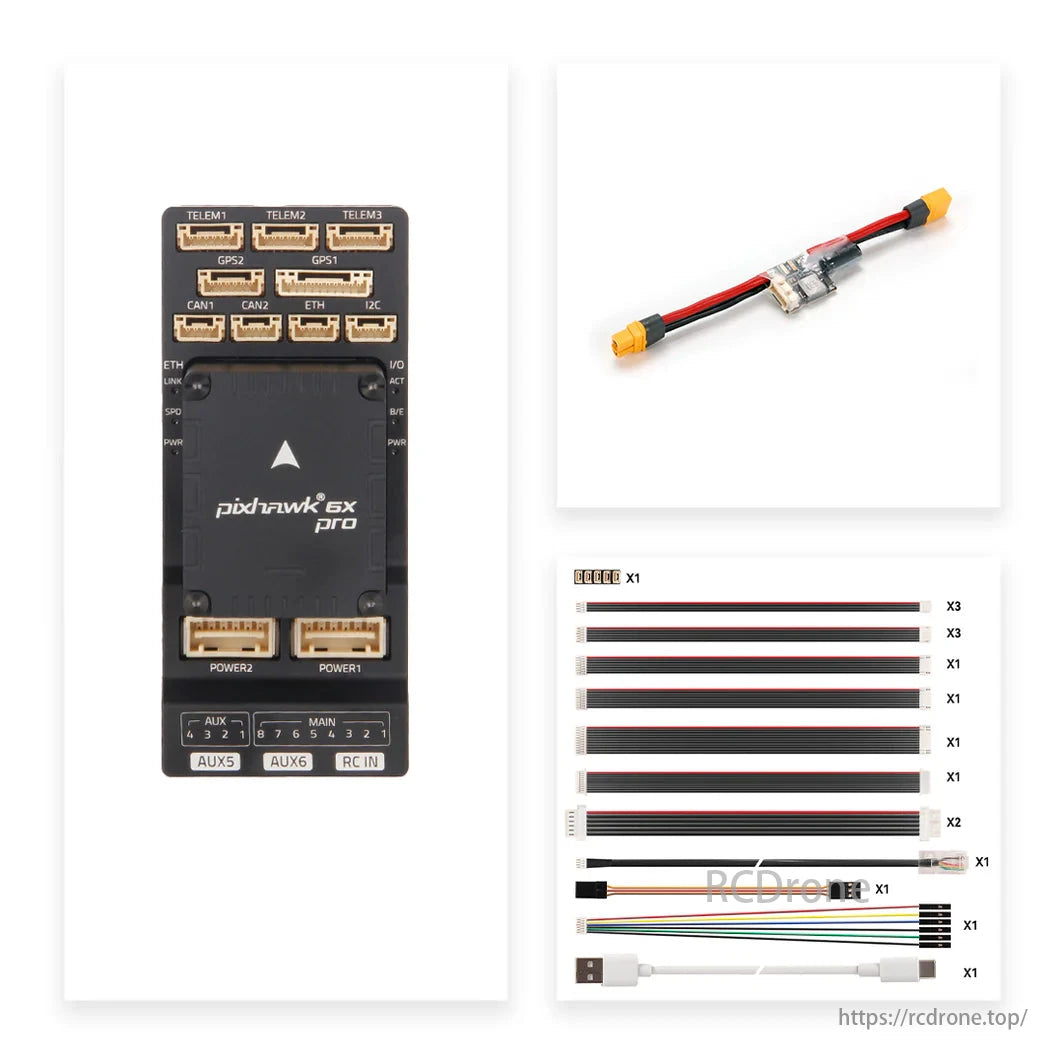
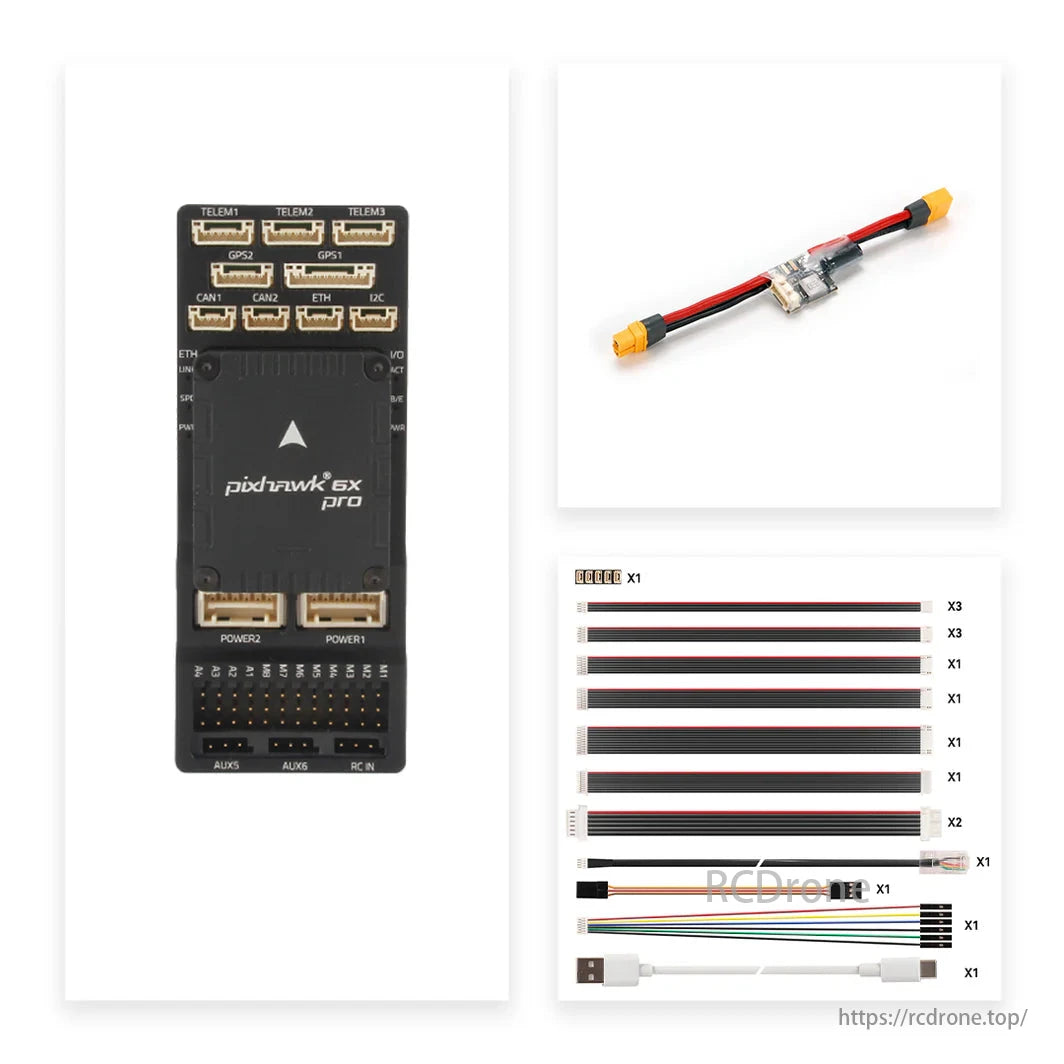
Pixhawk 6X Pro-diagram illustrerar anslutningar för en drönares autopilotsystem, inklusive GPS-moduler, kompass, markkontrollstation, kamera, telemetriradio, ESC:er, motorer och kraftfördelningskort. Olika gränssnitt som CAN, I2C, UART och USB används för kommunikation mellan komponenter.