Holybro Pixhawk 6X-RT - (Developer Edition) Autopilot Flight Controller Standard/Mini Set
Holybro Pixhawk 6X-RT - (Developer Edition) Autopilot Flight Controller Standard/Mini Set
HolyBro
Det gick inte att ladda hämtningstillgänglighet
Översikt
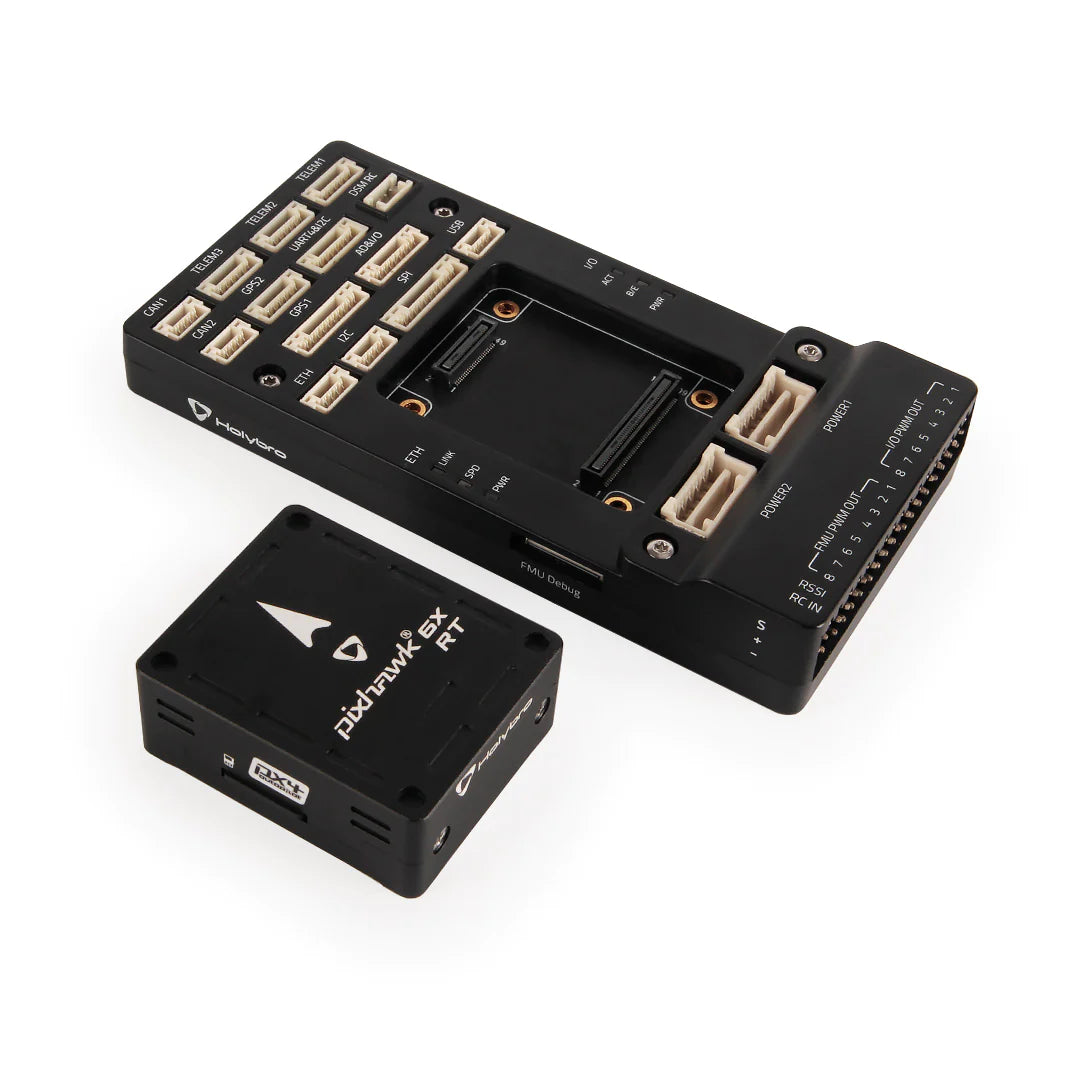
Pixhawk 6X-RT är baserad på Pixhawk® FMUv6X-RT Open Standard och Pixhawk® Autopilot Bus Standard. Den levereras med PX4 Autopilot® förinstallerad. Inuti Pixhawk 6X-RT flygkontroller kan du hitta en NXP-baserad i.MXRT1176 MCU, ihopkopplad med sensorteknik från Bosch® och InvenSense®, vilket ger dig flexibilitet och tillförlitlighet för att styra alla autonoma fordon.
i.MXRT1176 mikrokontroller innehåller en Arm® Cortex-M7 på 1 GHz och en Cortex-M4 på 400 MHz. Den har 2 MB SRAM och 64 MB Octal SPI Flash. Tack vare den uppdaterade processorkraften kan utvecklare bli mer produktiva och effektiva med sitt utvecklingsarbete, vilket möjliggör komplexa algoritmer och modeller.
Den inkluderar högpresterande, lågbrusiga IMU:er designade för bättre stabilisering, och har tredubbla redundanta IMU:er och dubbla redundanta barometrar på separata bussar. När autopiloten upptäcker ett sensorfel, växlar systemet sömlöst till en annan för att bibehålla flygkontrollens tillförlitlighet. En oberoende LDO driver varje sensorset med oberoende effektkontroll. Ett vibrationsisoleringssystem för att filtrera bort högfrekventa vibrationer och minska buller för att säkerställa exakta avläsningar, vilket gör att fordon kan nå bättre totala flygprestanda. En integrerad Microchip Ethernet PHY, höghastighetskommunikation med uppdragsdatorer via Ethernet är nu möjlig.
Pixhawk 6X-RT är perfekt för utvecklare vid företagsforskningslabb, startups, akademiker (forskning, professorer, studenter) och kommersiella tillämpningar. Den här flygkontrollen är kompatibel med alla baskort som använder Pixhawk Autopilot-bussen, såsom Pixhawk Baseboard, Pixhawk Mini Baseboard och Pixhawk RPi CM4 Baseboard.
Nyckeldesignpunkter
- Högpresterande dual core i.MXRT1176-processor med Cortex-M7 @ 1GHz – Cortex-M4 @ 400MHz
- Modulär flygkontroller: separerat IMU, FMU och bassystem anslutet med en 100-stifts & en 50-stifts Pixhawk® Autopilot Bus-kontakt.
- Redundans: 3x IMU-sensorer och 2x Barometersensorer på separata bussar
- Tridubbla redundansdomäner: Helt isolerade sensordomäner med separata bussar och separat effektkontroll
- Vibrationsisoleringssystem för att filtrera bort högfrekventa vibrationer och minska brus för att säkerställa korrekta avläsningar
- Ethernet-gränssnitt för höghastighetsuppdragsdatorintegration
- IMU:er är temperaturkontrollerade av inbyggda värmemotstånd, vilket möjliggör optimal arbetstemperatur för IMU:er
- Hårdvarusäkra element NXP EdgeLock SE051 en tillägg till den allmänt betrodda EdgeLock SE050 Plug & Trust säkra elementfamiljen, stöder appletuppdateringar i fält och levererar beprövad säkerhet certifierad till CC EAL 6+, med AVA_VAN.5 upp till OS-nivå, för starkt skydd mot de senaste attackscenarierna. Eg för att säkert lagra operatörs-ID
Obs:
- Denna utvecklarutgåva för tidiga användare medan vi fortsätter att samla flygtesttimmar
- Denna Flight Controller stöds för närvarande endast i PX4 Flight Stack. (Firmware-mål: FMUv6xrt). Det stöds inte i Ardupilot.
- Denna flygkontroller använder digital strömmodul (samma som Pixhawk 6X, fullständig lista kan hittas här) Jämförelsetabell för strömmoduler
Specifikation
-
MCU: i.MXRT1176
-
Cortex-M7 @ 1GHz
-
Cortex-M4 @ 400MHz
-
2 MB SRAM
-
64MB Octal SPI Flash
-
IO-processor: STM32F103
-
32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM
-
Inbyggda sensorer
-
Accel/Gyro: BMI088
-
Accel/Gyro: ICM-42670-P
-
Accel/Gyro: ICM-42686-P
-
Mag: BMM150
-
Barometer: 2x BMP388
- Säkert element för maskinvara
- NXP EdgeLock SE051C2
- SDHC-gränssnitt
- 12-kanals PWM
- 8x UART
- 4x I2C
- 6x SPI
- 3x CAN-FD
- RMII 100M Ethernet
- USB
- Aktivering av öppen källkod
- PX4 Autopilot
- NuttX RTOS
- Zephyr RTOS
SKU20257 Standard Set/ SKU258 Mini Set Inkluderar:
-
Pixhawk 6X-RT flygkontrollmodul
-
Pixhawk Standard Base/Pixhawk Mini Base
- PM02D HV Power Module
-
Kabeluppsättning
Referenslänk:
- Firmware Flashing Instruction (Github)
- PX4 på NXP IMXRT1176 1 GHz MCU - Presentationsbilder av NXP
- i.MX RT1176 – produktsida 1 GHz Crossover MCU med Arm® Cortex®-kärnor
- EdgeLock® SE051: Beprövad, lättanvänd IoT-säkerhetslösning med stöd för uppdateringsbarhet och anpassade applets