Holybro Pixhawk Jetson Baseboard Bundle med 6X / 6X Pro och NVIDIA Jetson
Holybro Pixhawk Jetson Baseboard Bundle med 6X / 6X Pro och NVIDIA Jetson
HolyBro
Det gick inte att ladda hämtningstillgänglighet
Översikt
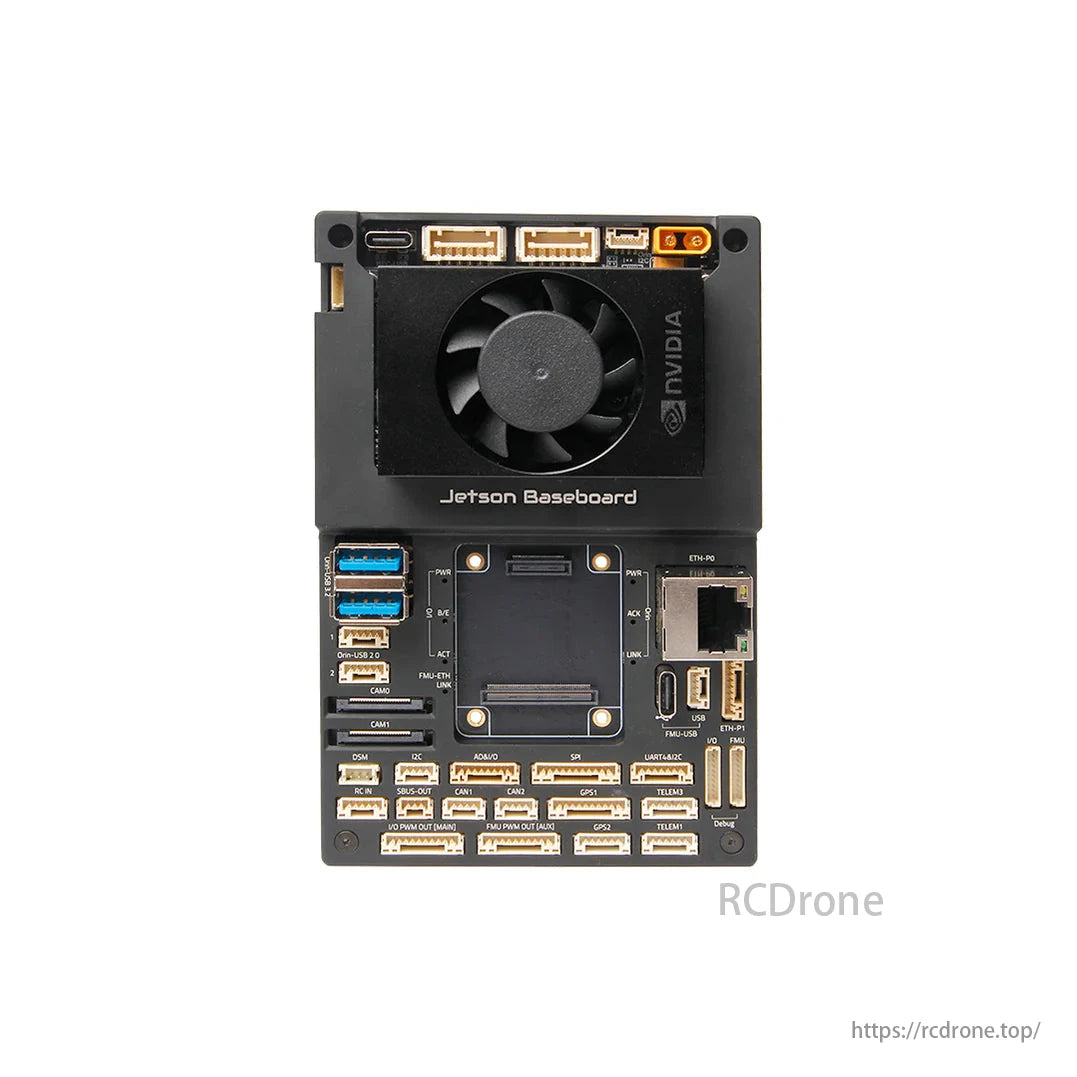
De Holybro Pixhawk Jetson Baseboard är utformad utifrån Pixhawk Autopilot Bus (PAB) specifikation med öppen källkod och integreras sömlöst med NVIDIA Jetson Orin NX/Nano Carrier Board. De PAB Form Factor tillåter kompatibilitet med alla PAB-flygkontroller, inklusive Pixhawk 6X. Detta kort kombinerar beräkningskraften hos NVIDIA Jetson med flygkontrollkapaciteten Pixhawk, vilket gör den idealisk för avancerade autonoma applikationer.
Nyckelfunktioner
-
Unified System: Kombinerar Pixhawk och NVIDIA Jetson i en enda bräda.
-
Sömlös anslutning: Jetson och Pixhawk kommunicerar via UART, CAN och Ethernet-switch.
-
Bred kompatibilitet: Stöder Jetson Orin NX & Orin Nano.
-
Höghastighetsexpansion: Drag 2x M.2 nyckelfack för WiFi/Bluetooth och NVMe SSD.
-
Pixhawk 6X Integration: Utrustad med ICM-45686 sensorer för förbättrad flygkontroll.
Processorer och sensorer
FMU-processor:
-
STM32H753
-
32-bitars ARM Cortex-M7, 480MHz
-
2MB flashminne, 1MB RAM
IO-processor:
-
STM32F103
-
32-bitars ARM Cortex-M3, 72MHz
-
64KB SRAM
Inbyggda sensorer (Rev8)
-
Accelerometer/gyro: 3x ICM-45686 (med BalancedGyro™-teknik)
-
Barometer: ICP20100 & BMP388
-
Magnetometer: BMM150
Baseboard-portar och anslutningar
Jetson-kontakter
-
2x Gigabit Ethernet-portar (Ansluten till Jetson & Autopilot via RTL8367S Ethernet-switch)
-
2x MIPI CSI-kameraingångar (4 banor vardera, 22-stifts Raspberry Pi Cam FFC)
-
2x USB 3.0-värdportar (USB-A, 5A strömgräns)
-
2x USB 2.0 Värdportar (5-stift JST-GH)
-
USB 2.0 för felsökning (USB-C)
-
Mini HDMI-utgång
-
2x M.2-fack:
-
Key M (2242) för NVMe SSD (PCIEx4)
-
Nyckel E (2230) för WiFi/BT (PCIx2, UART, USB, I2S)
-
-
CAN-port (Ansluten till Autopilot CAN2, 4-stift JST-GH)
-
SPI, I2C, I2S, UART-portar (Olika JST-GH-kontakter)
-
Fläktströmport
-
Strömingång: XT30-kontakt, 7-21V (3S-4S)
-
UBEC 12A (3-14S) Rekommenderas för >4S-applikationer
Autopilotkontakter
-
Pixhawk Autopilot Bus Interface: 100-stift och 50-stift Hirose DF40
-
Redundanta digitala kraftmodulingångar
-
Stöd för I2C Power Monitor
-
GPS- och säkerhetsbrytarportar: 10-stift & 6-stift JST-GH
-
2x CAN-portar (4-stifts JST-GH)
-
3x telemetriportar (JST-GH, en ansluten till Jetsons UART1)
-
16 PWM-utgångar (2x 10-stifts JST-GH)
-
USB 2.0 (USB-C & 4-pin JST-GH)
-
DSM-ingång (3-stift JST-ZH, 1,5 mm delning)
-
RC-ingång (PPM/SBUS, 5-pin JST-GH)
-
SPI-port för extern sensorbuss (SPI5, 11-stifts JST-GH)
-
2x felsökningsportar (FMU & IO, 10-pin JST-SH)
Strömkrav
-
Ingångsspänning: 7-21V (3S-4S) via XT30-kontakt
-
Minsta effektkrav: 8V/3A (varierar beroende på kringutrustning)
-
Stöder extern UBEC 12A (3-14S) för redundans och högre spänningstillämpningar
-
Inbyggt överspänningsskydd
Mått & Vikt
-
Brädestorlek: 126 x 80 x 38 mm (utan Jetson & Flight Controller)
-
Vikt: 203.2g (Inklusive Jetson, Heatsink, Flight Controller, SSD, Wi-Fi-modul)
UBEC-12A Specifikationer
-
Ingångsspänning: 3~14S (XT30)
-
Utspänning: 6,0V/7,2V/8,0V/9,2V (7,2V rekommenderas för Jetson)
-
Kontinuerlig utström: 12A
-
Burst-utgångsström: 24A
-
Storlek: 48 x 33,6 x 16,3 mm
-
Vikt: 47,8g
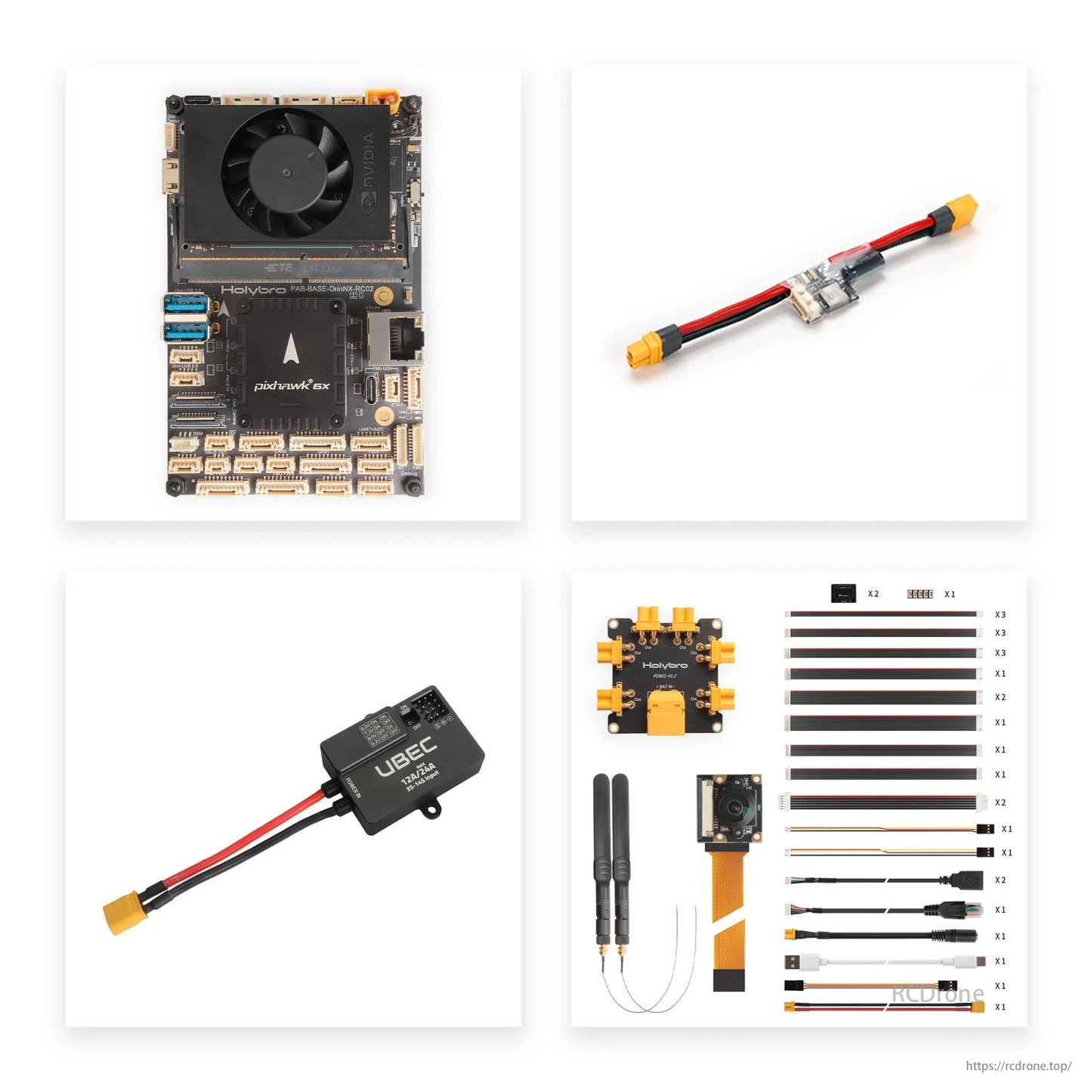
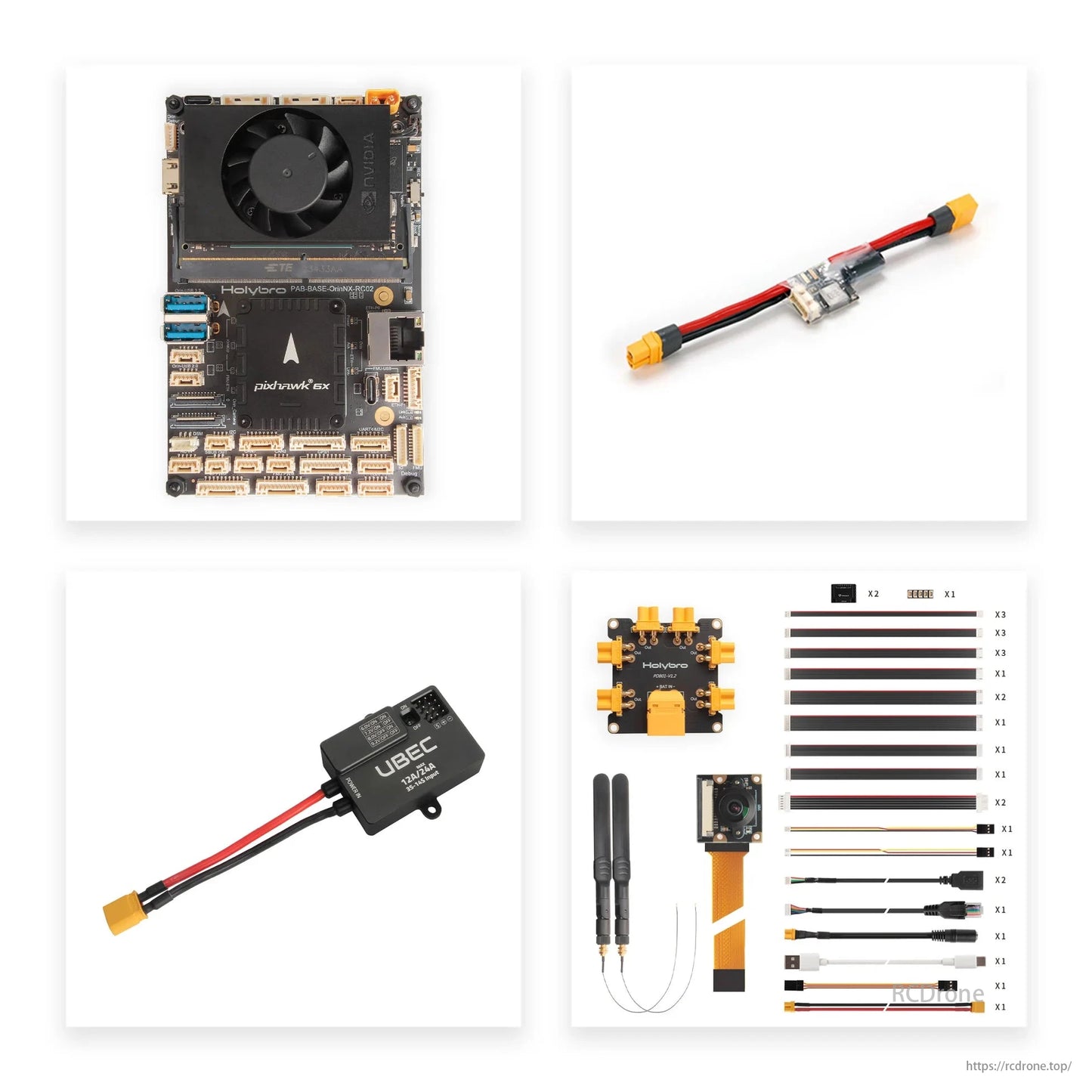
Paketets innehåll
Pixhawk 6X-paket
-
Pixhawk 6X (ICM-45686) flygkontrollmodul
-
Pixhawk Jetson Orin Baseboard
-
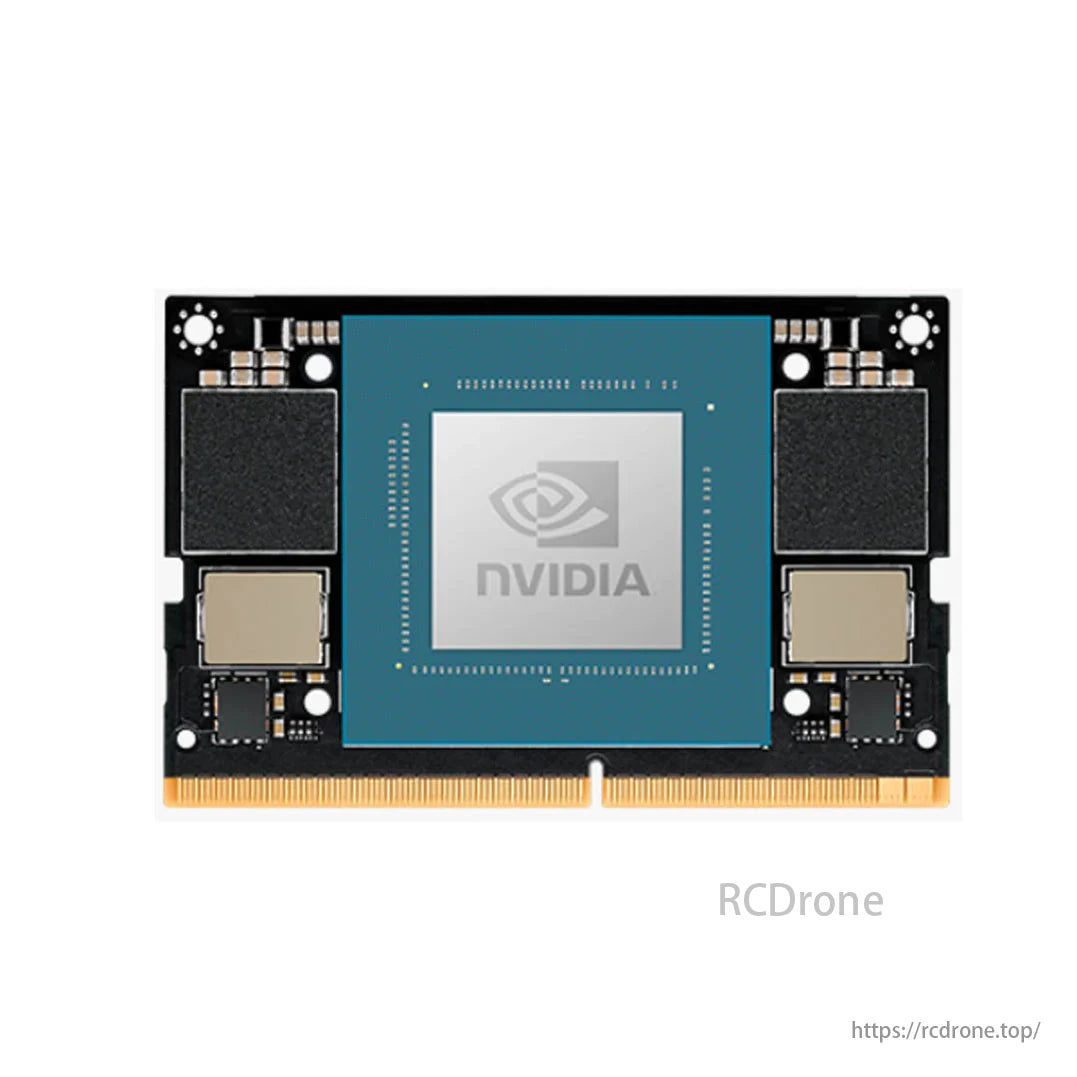
Nvidia Orin NX (16GB RAM) / Orin Nano (4GB RAM) med kylfläns och fläkt
-
SSD: Samsung PM9B1 PCIe 4.0 NVMe 512GB
-
Wi-Fi och Bluetooth-modul: Intel 8265NGW AC Dual Band / Realtek RTL8B22CE
-
Kamera: IMX219-200
-
PM02D Power Module
-
UBEC 12A (3-14S)
-
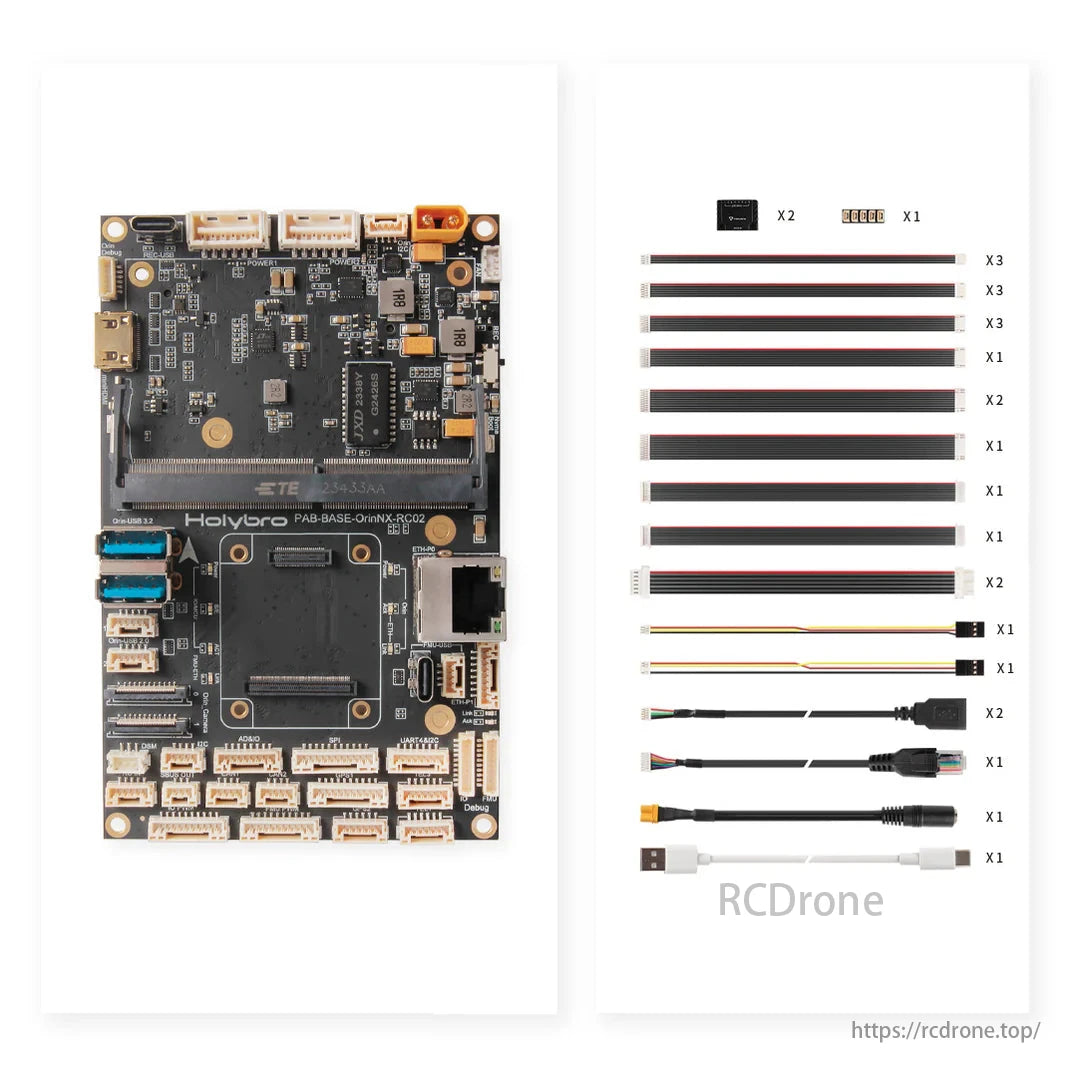
PDB-kort & kabelset
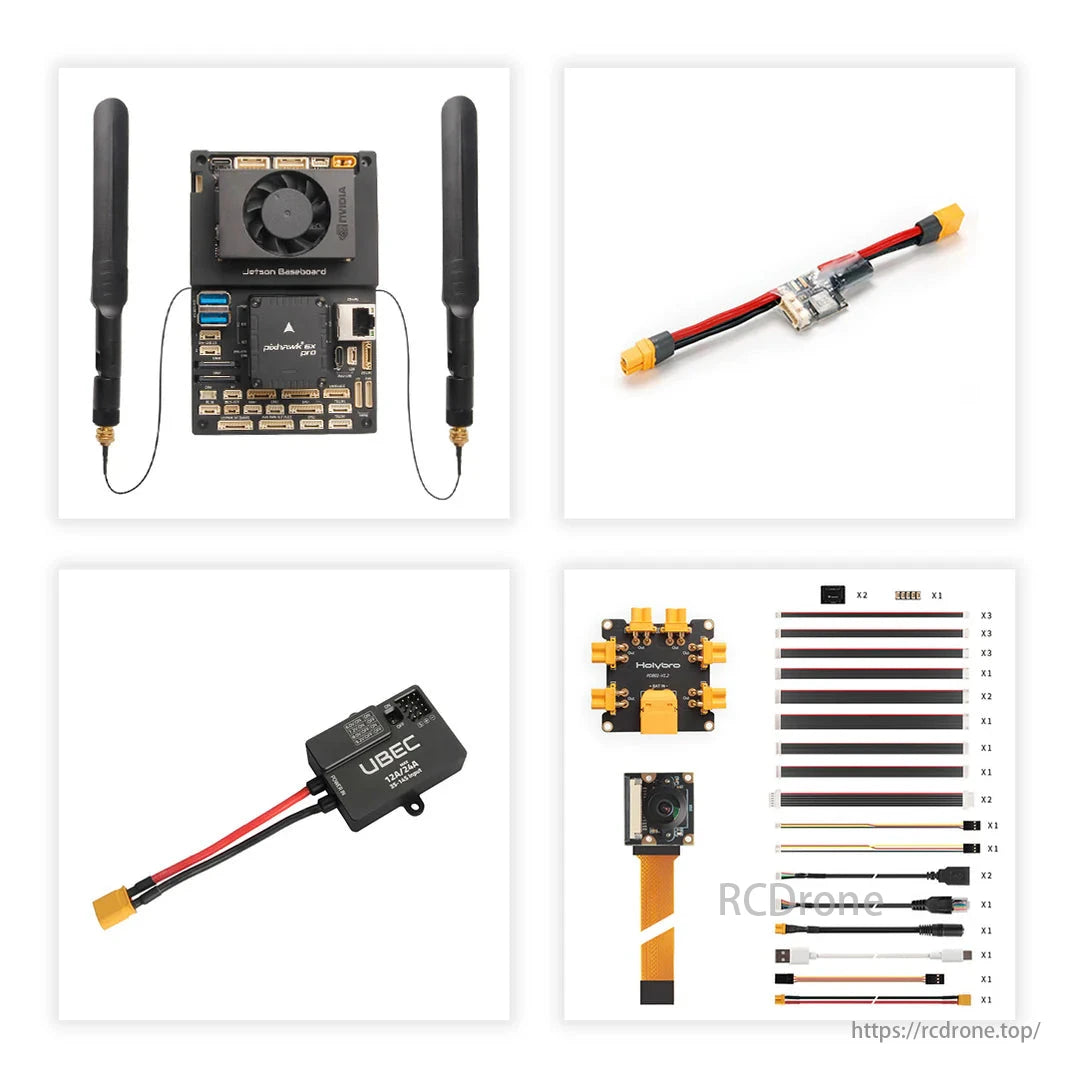
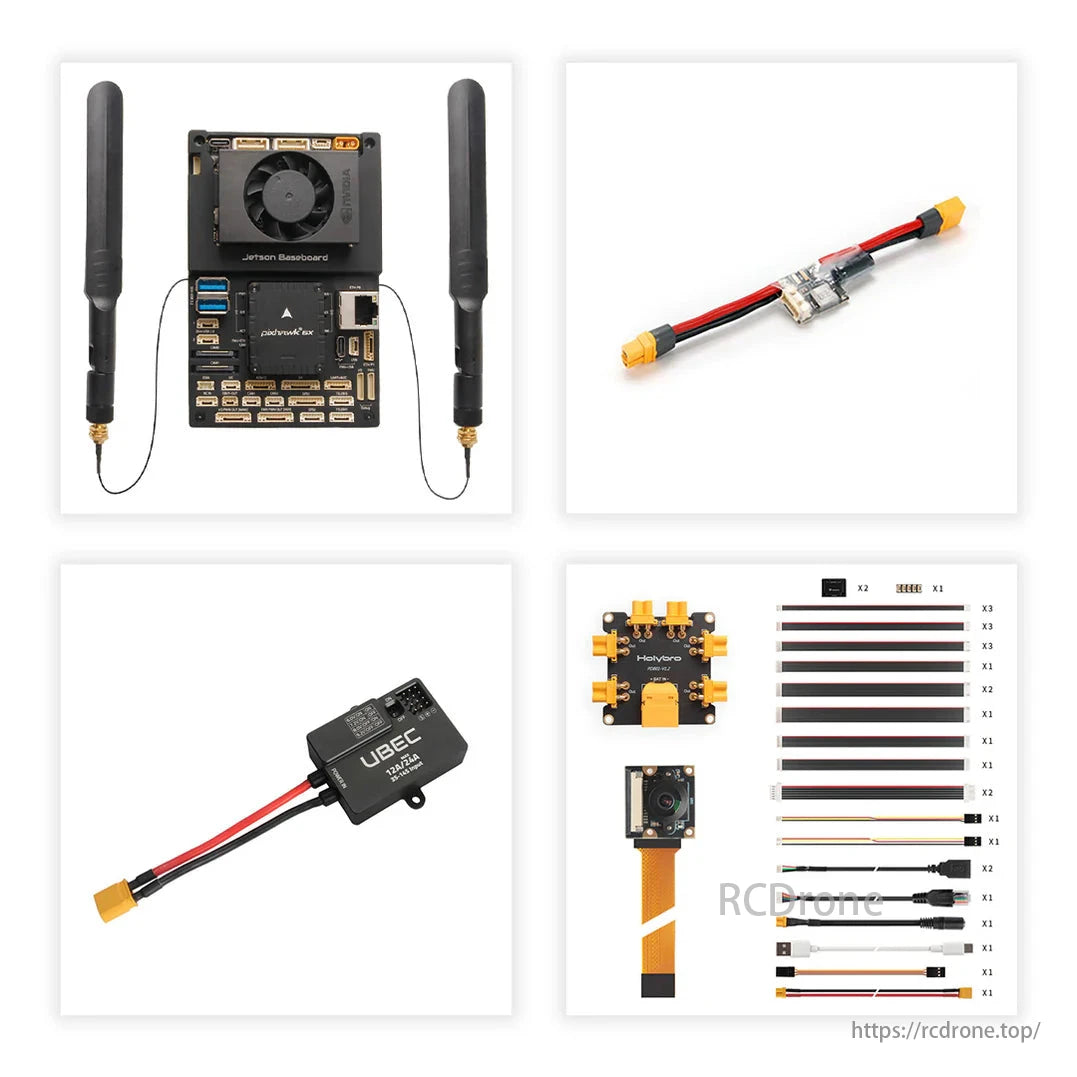
Pixhawk 6X Pro-paket
-
Pixhawk 6X Pro Flight Controller Module
-
Pixhawk Jetson Orin Baseboard (med eller utan fodral)
-
Nvidia Orin NX (16GB RAM) / Orin Nano (4GB RAM) med kylfläns och fläkt
-
SSD, Wi-Fi/Bluetooth-modul, kamera, PM02D-strömmodul, UBEC 12A, PDB-kort, kabelset
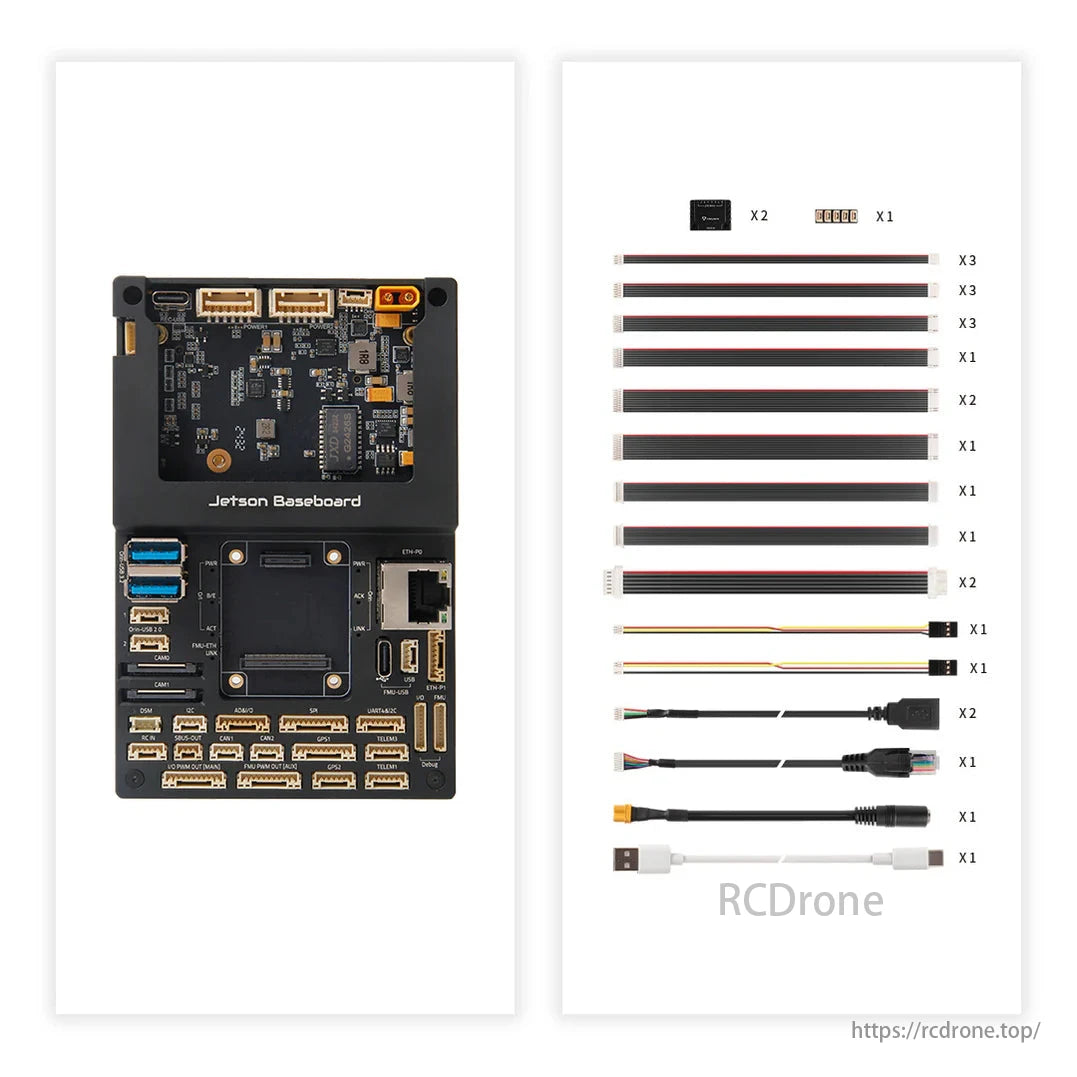
Endast Jetson Baseboard
-
Pixhawk Jetson Orin Baseboard (med eller utan fodral)
-
Kabelsats
Referenslänkar
Standardinloggningsuppgifter för Jetson Orin:
-
ID:
holybro -
Lösenord:
123
Detaljer




Pixhawk och Nvidia Jetson kombinerade i singelbräda.

Nvidia jetson ansluten via uart can och ethernet-switch med rj45-kontakt för autopilotsystem
Pixhawk Autopilot Bus (PAB) Specifikation för öppen källkod

Jetson SoDIMM-kontaktsystem helt kompatibelt: Jetson Orin NX/Nano

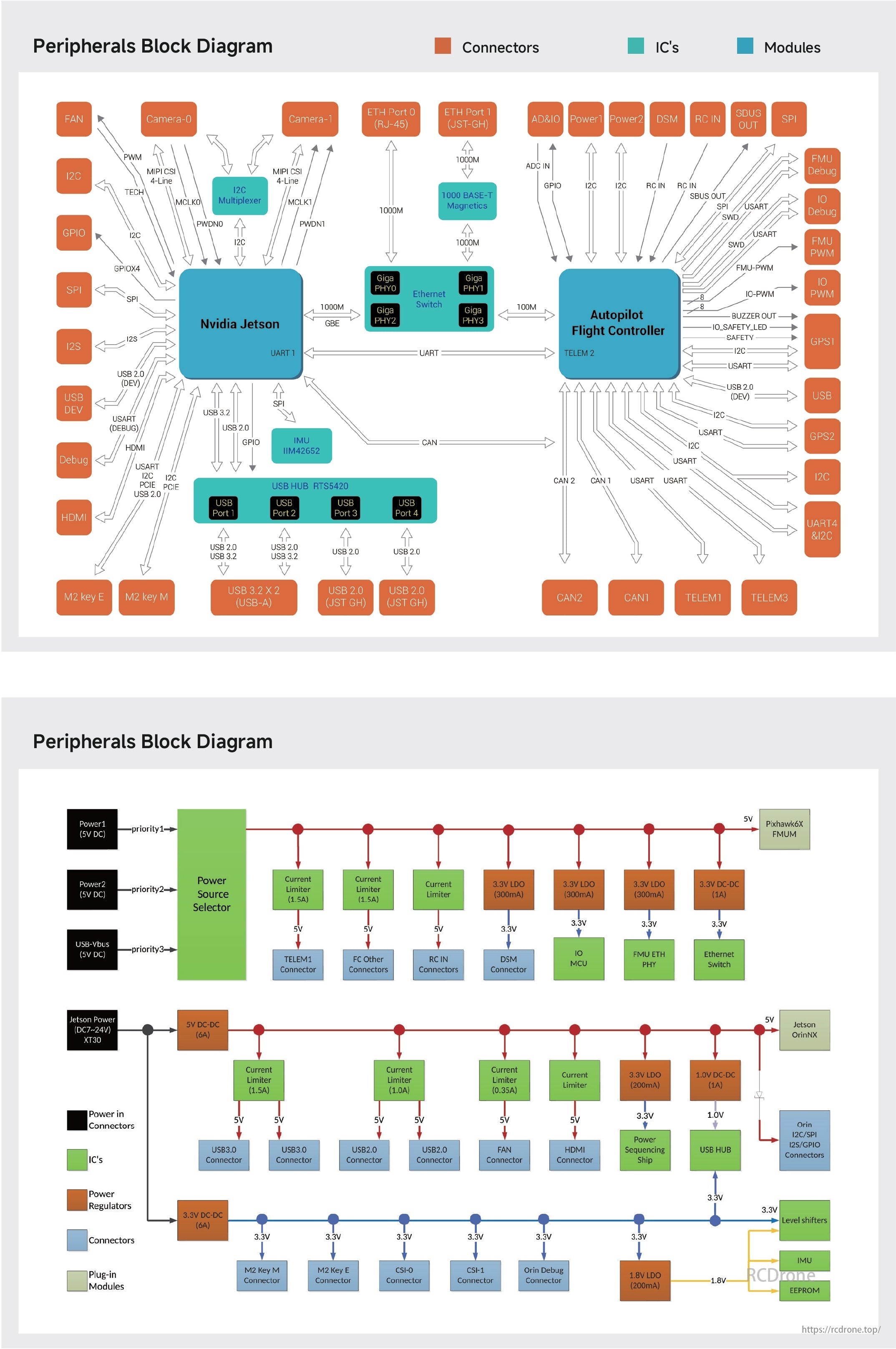
Bilden visar ett blockschema för kringutrustning för ett inbyggt system, med komponenter som Nvidia Jetson och Autopilot Flight Controller. Den innehåller olika kontakter, IC:er och moduler som USB-portar, Ethernet-switchar och strömregulatorer, som illustrerar deras sammankopplingar och dataflöde.
Referens kopplingsschema

Två diagram illustrerar kraftdistributionssystem för en Jetson-modul som använder ett batteri. Det vänstra diagrammet använder en PM02D Power Module och ett Power Distribution Board, medan det högra diagrammet inkluderar en Extern UBEC för batterier större än 4S.Båda inställningarna säkerställer korrekt spänningsreglering för Jetson och Pixhawk Power.
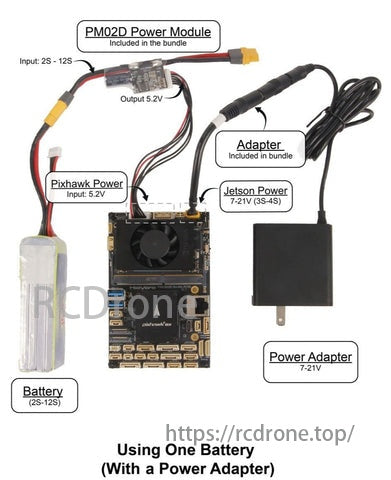
PM02D Power Module ansluter batteri till Pixhawk och Jetson, med ett batteri med en strömadapter för 7-21V ingång.
Related Collections