


Inspire Robots RH56DFTP Fingerfärdig Robothand – 6 DOF, 30N Grepp, Taktila & Kraftsensorer, ModbusTCP+CAN-styrning
Inspire Robots RH56DFTP Fingerfärdig Robothand – 6 DOF, 30N Grepp, Taktila & Kraftsensorer, ModbusTCP+CAN-styrning
Inspire Robots
Det gick inte att ladda hämtningstillgänglighet
Översikt
Den Inspire Robots RH56DFTP Intelligenta Bioniska Robot Handen är en högprecisions, femfinger dexterous hand designad för avancerade robotapplikationer. Med 6 frihetsgrader, 12 leder, och en kombination av 6 kraftsensorer och 17 taktila sensorer, levererar den mänsklig-liknande fingerfärdighet och taktil perception. Med en fingertoppkraft på 30N (≈3 kg per finger), hög hastighet vinkelrörelse, och sömlös ModbusTCP+CAN (RS485) kommunikation, är denna hand idealisk för forskning, industriell automation och bionisk robotik.
Nyckelfunktioner
-
Mänsklig-liknande taktil precision: Integrerade taktila sensorer erbjuder realtidsuppfattning för noggrann objektmanipulation.
-
Stark och stabilt grepp: Varje finger ger upp till 3 kg aktiveringskraft, vilket möjliggör pålitlig greppning av olika objekt.
-
Strömavbrott självlåsande: Behåller positionen när den är avstängd, vilket eliminerar behovet av att nollställa vid uppstart.
-
Hög hastighet: Tummens rörelse överstiger 130°/s, medan fyrfinger rörelse når 200°/s för responsiv kontroll.
-
Hållbar och pålitlig: Byggd för långvarig användning i forskningslaboratorier, robotplattformar och industriella miljöer.
Specifikationer
| Parameter | Värde |
|---|---|
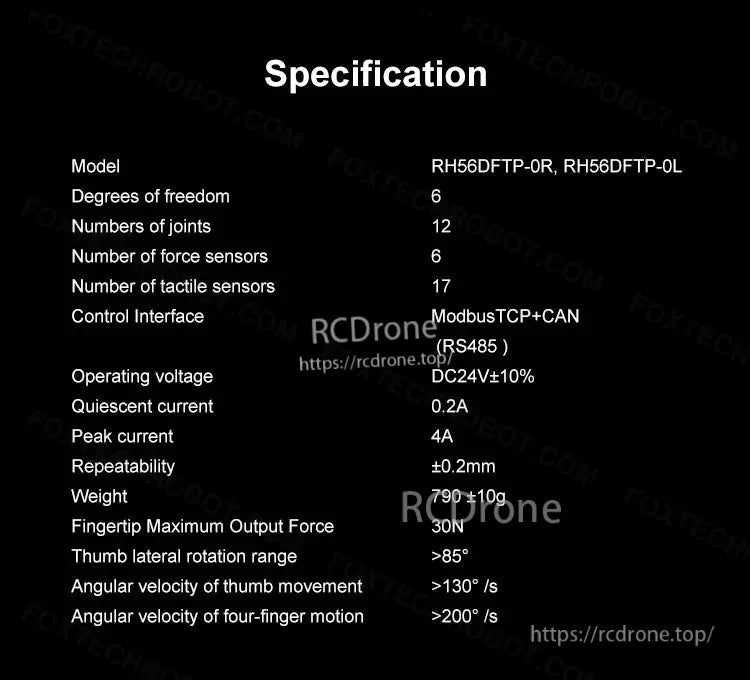
| Modell | RH56DFTP-0R, RH56DFTP-0L |
| Frihetsgrader | 6 |
| Antal leder | 12 |
| Kraftsensorer | 6 |
| Taktile sensorer | 17 |
| Kontrollgränssnitt | ModbusTCP + CAN (RS485) |
| Driftspänning | DC 24V ±10% |
| Viloström | 0.2A |
| Spetsström | 4A |
| Upprepbarhet | ±0.2mm |
| Vikt | 790g ±10g |
| Maximal utgångskraft vid fingertopp | 30N (≈3 kg) |
| Tummens laterala rotationsområde | >85° |
| Vinkelhastighet – tumme | >130°/s |
| Vinkelhastighet – fyra fingrar | >200°/s |
Tillämpningar
-
Forskning och Utveckling: Avancerad robotikforskning vid universitet och laboratorier.
-
Industriell Automation: Högprecisionsmontering och hanteringsuppgifter.
-
Bioniska Lösningar: Studier av proteshänder och humanoid robotik.
-
AI och Maskininlärning: Taktile sensorik och manipulationsprojekt som kräver exakt realtidsåterkoppling.
Höjdpunkter
RH56DFTP utmärker sig i uppgifter som kräver precis kraftkontroll och delikata operationer, såsom att plocka blåbär, körsbärstomater eller druvor utan att orsaka skador. Den hanterar också högkraftsgrepp för robusta industriella tillämpningar, vilket gör den till en mångsidig lösning för komplexa manipulationsuppgifter.
Detaljer
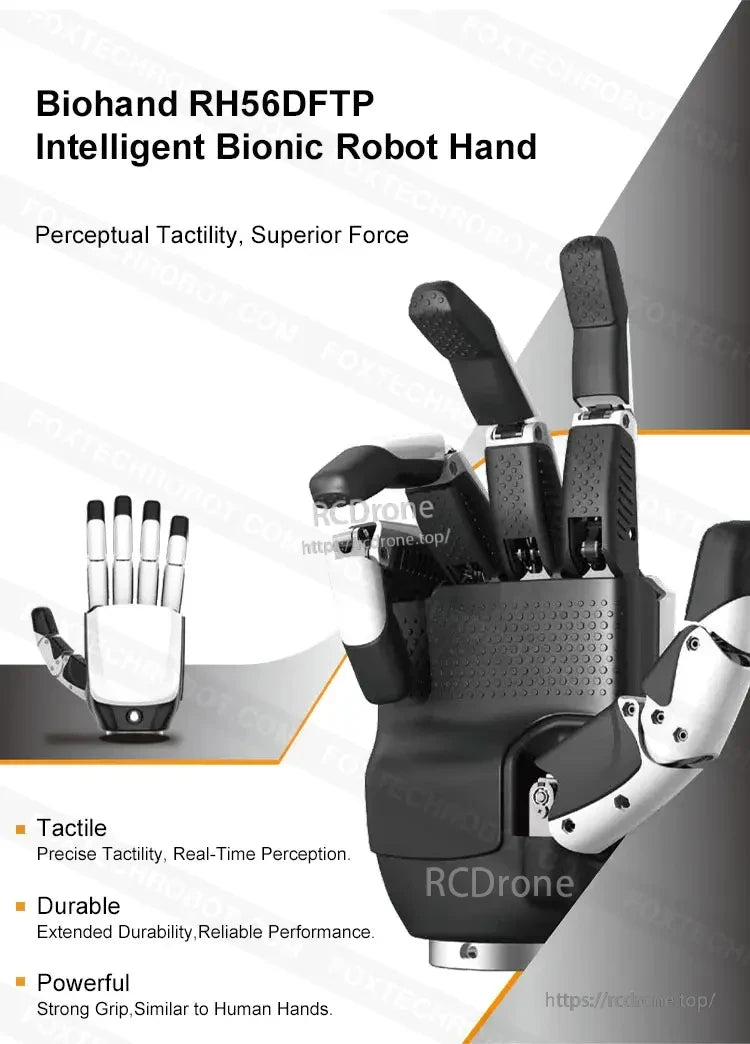
Biohand RHS6DFTP intelligent bionisk robothand erbjuder perceptuell taktilitet, överlägsen kraft och precis taktilitet i realtid, med hållbar förlängd hållbarhet för pålitlig prestanda och kraftigt grepp liknande mänskliga händer.

Robothand med sex frihetsgrader, designad för precision och fingerfärdighet, perfekt för olika tillämpningar såsom kirurgi, montering eller laboratoriearbete.

Kraftigt grepp, mänsklig-liknande prestanda. 3 kg aktiveringskraft per finger.Dexterös robothand med avancerad design och precisionsingenjörskonst.


Strömförlustens självlåsningsmekanism håller positionen stabil och pålitlig utan att nollställning krävs vid uppstart eller avstängning.


Multifunktionellt handverktyg med kraftsensor, lämpligt för att plocka och nypa små frukter som blåbär, körsbärstomater och druvor.

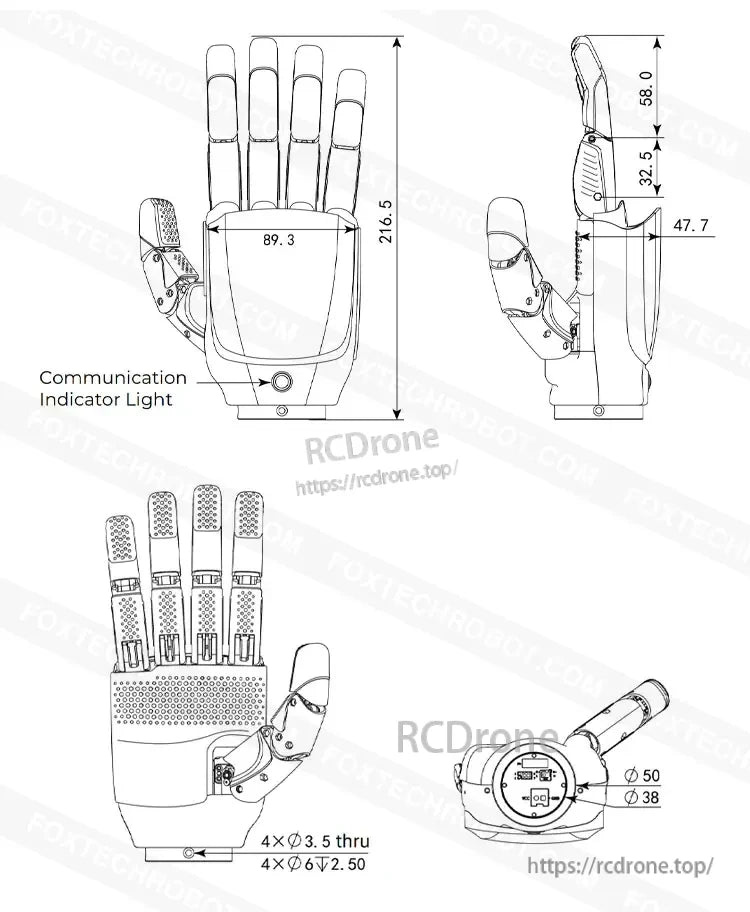
Kommunikationsindikatorlampa, 8 x 47,7 mm, 89 mm lång, ingen LED, 5x5: 38-4x03,5 till 4xp6v2, 50 ohm, 2 lager
RHS6DFTP-OR och RHS6DFTP-OL specifikationsmodellen har 3 frihetsgrader, 12 leder och 17 kraftsensorer och taktila sensorer. Den använder Modbus TCP+CAN (RS485) kontrollgränssnitt med en DC24V +10% driftspänning.



Related Collections


