













LINKERBOT Linker Hand L10 Robot Hand, 10 frihetsgrader, CAN/RS485-styrning, snäckväxeldrift, 80N grepp, DC24V+/-10%
LINKERBOT Linker Hand L10 Robot Hand, 10 frihetsgrader, CAN/RS485-styrning, snäckväxeldrift, 80N grepp, DC24V+/-10%
LINKERBOT
Det gick inte att ladda hämtningstillgänglighet
Översikt
LINKERBOT Linker Hand L10 är en robothand designad för skicklig manipulation och precis kontroll. Den har 10 frihetsgrader med en maskväxelöverföring och kommunicerar via CAN/RS485 för pålitlig integration i forsknings- och industrisystem.
Nyckelfunktioner
- 10 DoF skicklig hand med maskväxelöverföring för stabil aktivering.
- Kontrollgränssnitt: CAN och RS485.
- Upprepningsnoggrannhet < +/-0.2mm; typisk öppnings/stängningstid 1.2s.
- Kraftkapacitet: 15N max tumspetskraft, 15N max fyrfinger spetskraft, 80N max femfinger greppkraft.
- Kontrolllägen och verktyg från produktmanualen: positionskontroll, hastighetskontroll, haptisk feedback (kraftkontroll) via fingertopsensorer, och online firmwareuppgradering.
- Ecosystem (per produktmaterial): stödda robotarmar UR, Franka, XArm, RealMan, AgileX; stödda simulatorer Pybullet, Isaac, MuJoCo; användningsexempel inkluderar ROS1, ROS2, Python, C++; datainsamlingsmetoder inkluderar teleoperationshandskar, exoskelett-handskar, flytande metall-sensorhandskar, vision och VR (Meta Quest 3).
För förhandsförsäljning eller integrationssupport, kontakta [email protected] or besök https://rcdrone.top/.
Specifikationer
| Frihetsgrader (DoF) | 10 |
| Antal leder | 20 (10 Aktiva + 10 Passiva) |
| Överföringsläge | Skruvväxelöverföring |
| Kontrollgränssnitt | CAN/RS485 |
| Vikt | 800g |
| Maximal belastning | 25kg |
| Driftspänning | DC24V+/-10% |
| Statisk ström | 0.2A |
| Genomsnittlig ström (Ingen belastning) | 0.5A |
| Maximal ström | 3A |
| Upprepningsnoggrannhet för positionering | < +/-0.2mm |
| Öppnings-/stängningstid | 1.2s |
| Maximal tumme fingertopp kraft | 15N |
| Maximal fyra-finger fingertopp kraft | 15N |
| Maximal fem-finger grepp kraft | 80N |
Trycksensor
| Piezoresistiv array | 6*12 |
| Sensor kraft-bärande område | 9.6*14.4mm |
| Utlösningskraft | 5g |
| Mätningsområde | 20N |
| Livslängd | 100 000 cykler |
| Kommunikationsramfrekvens | 200FPS |
Kapacitiv sensor (valfritt)
| Provtagningfrekvens | >=50Hz |
| Mätningsområde | 0-30N |
| Överbelastningsgräns | 60N |
| Tryckkänslighet | 0.1N |
| Mätningsupplösning | 0.5%FS |
| Mätningsnoggrannhet | 2%FS |
| Tryckupplösning | 0.25N |
| Riktning Upplösning | 45° |
| Detekteringsavstånd | 1cm (Metall, Mänsklig Kropp) |
Vad som ingår
- USB-till-CAN Debugging Kabel x1
- Anslutningskabel XT30 (2+2) x1
- Strömadapter x1
- Strömkabel x1
- Linker Hand L10 x1
Tillämpningar
- Forskning och utbildning inom skicklig manipulation med hjälp av ROS1/ROS2 och simulatorer (Pybullet, Isaac, MuJoCo).
- Teleoperation via handskar, exoskelett-handskar, flytande metall-sensorhandskar, vision och VR (Meta Quest 3).
- Precisionmontering, banbaserade operationer, skruvdragning, grepp av tunna plåtar och allmän objektshantering.
Manualer
Linker_Hand_L10_Product_Manual.pdf
Detaljer

Linker Hand L10 erbjuder 10 DOF, precis rörelse via länkmekanism och anpassade motorstyrningar. Stöder UR, Franka, ROS, Python, VR, Pybullet, CAN och mer för mångsidig robotintegration och kontroll.
Linker Hand L10 levererar hög fingerfärdighet, med varje finger som erbjuder 4 frihetsgrader för precisa operationer. Dess multisensoriska system—utrustat med kameror och e-hud—ger omfattande miljömedvetenhet och adaptiv interaktion. Genom end-cloud integration kan användare snabbt distribuera handen via en kodfri färdighetsbiblioteks molntjänst, vilket möjliggör effektiv anpassning samtidigt som den operativa komplexiteten minskas. Tillsammans stöder dessa funktioner ett brett spektrum av komplexa tillämpningar, vilket förbättrar både precision och användarvänlighet utan att kräva omfattande programmering eller installation.

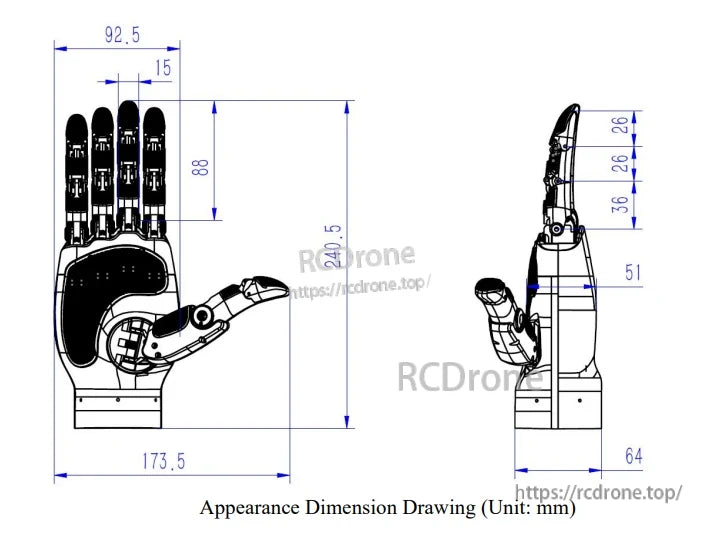
Robotens handdimensioner i millimeter, som visar fram- och sidovy med exakta mått för design och montering.
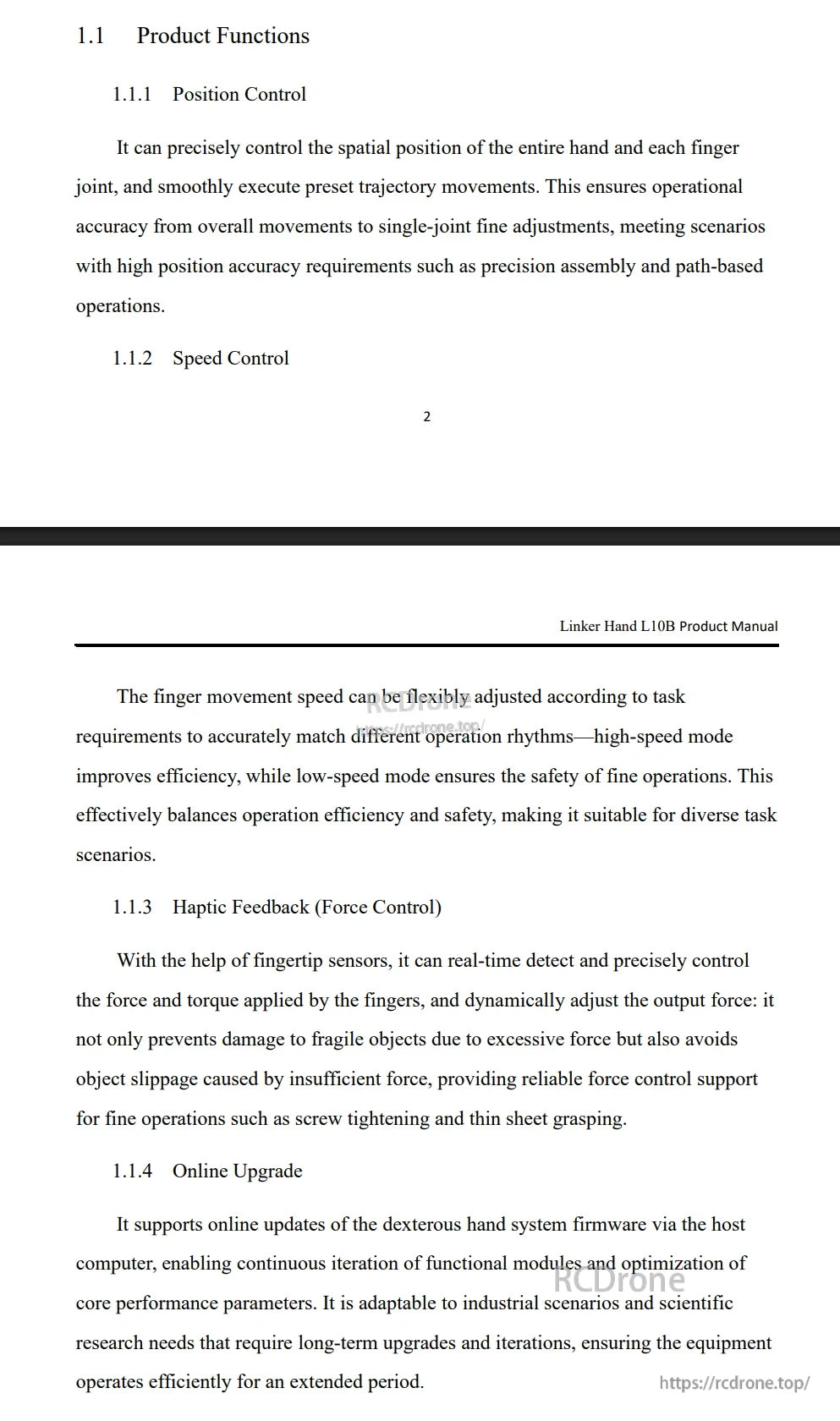
Linker Hand L10B erbjuder precis positions- och hastighetskontroll, haptisk feedback för krafthantering och online firmwareuppgraderingar. Designad för noggrannhet, säkerhet och anpassningsförmåga i industriella och forskningsapplikationer som kräver fin manipulation och långsiktig prestanda.
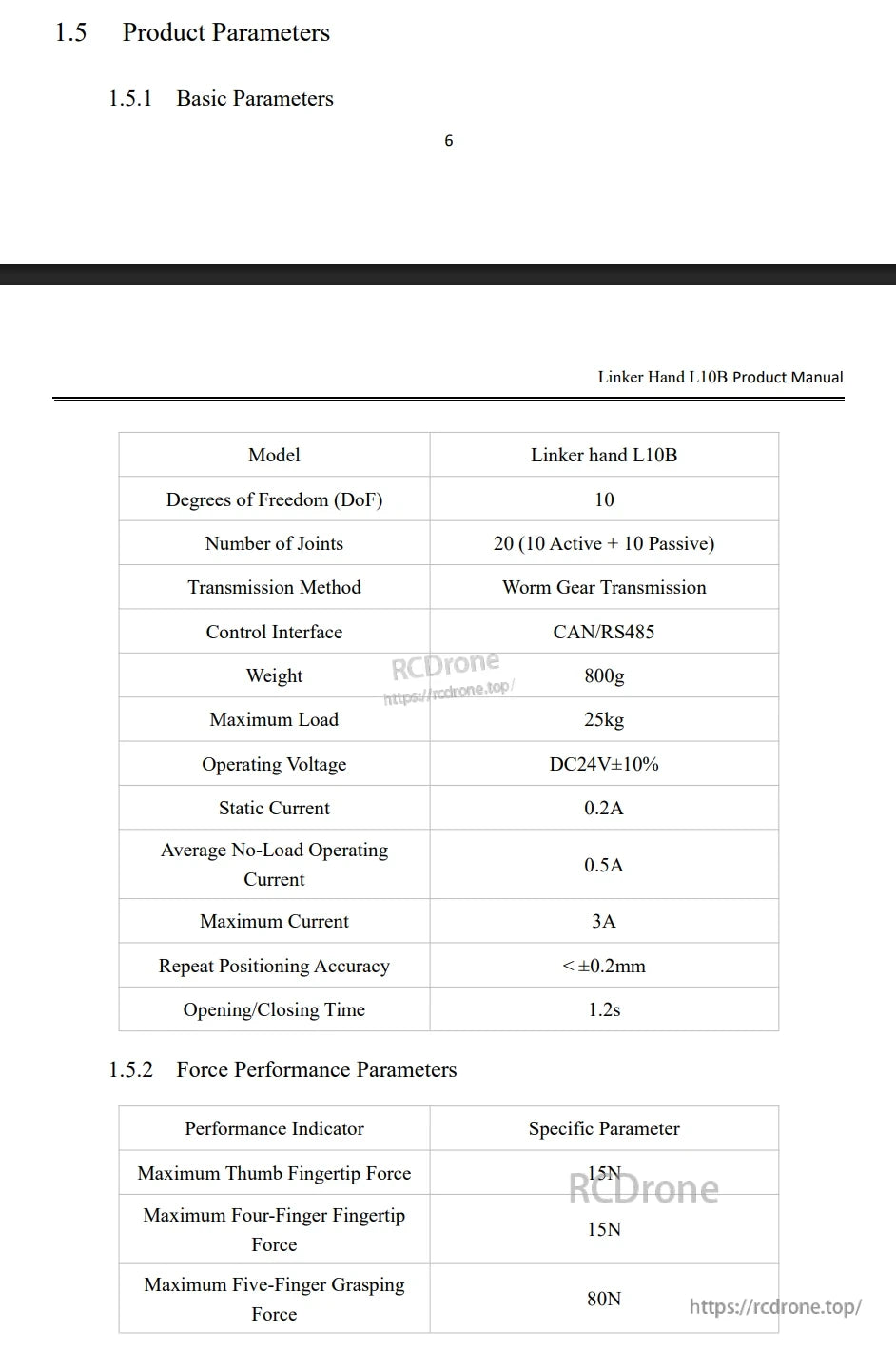
Linker Hand L10B erbjuder 10 DoF, 20 leder, snäckväxelöverföring och CAN/RS485-kontroll. Den väger 800g och klarar upp till 25kg vid DC24V, vilket ger precis positionering och greppkrafter upp till 80N.

Har en 6x12 piezoresistiv matris (20N intervall, 100k cykler). Valfri kapacitiv sensor: ≥50Hz provtagning, 0–30N intervall, 45° riktning upplösning, upptäcker metall eller människokropp på 1cm.
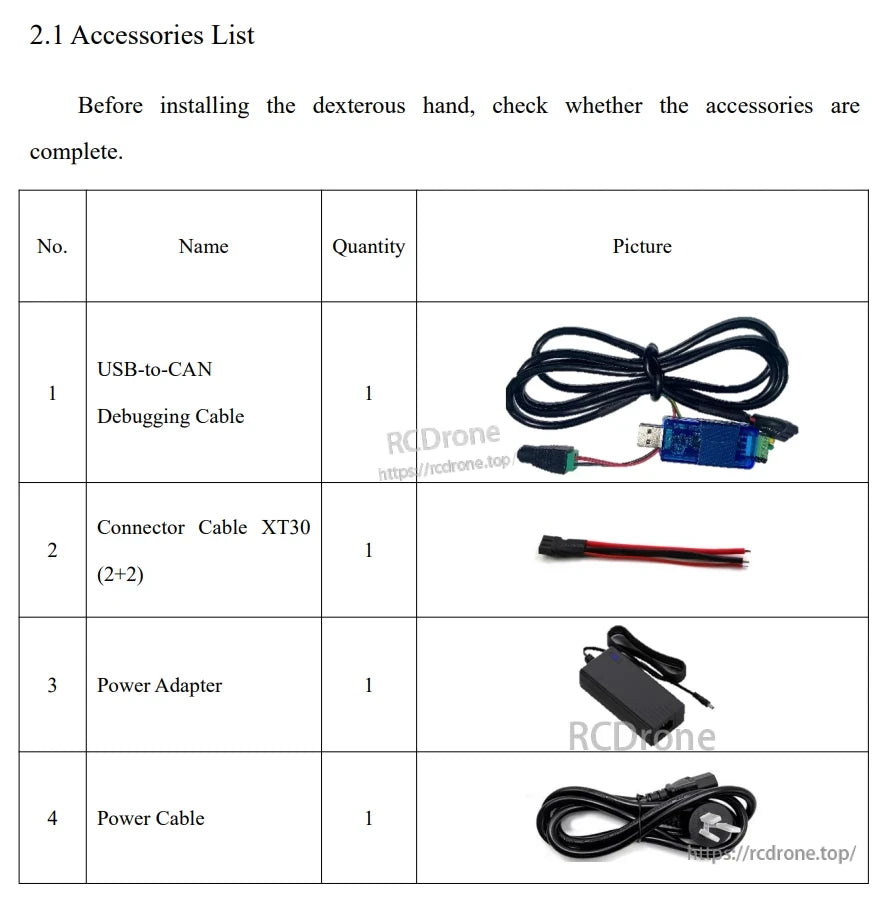
Tillbehörslista för installation av rörlig hand: USB-till-CAN-kabel, XT30-kontakt, strömadapter och strömkabel, varje kvantitet en.
Related Collections













