







LINKERBOT Linker Hand O6 Robot Hand, 6 frihetsgrader, 11 leder, CAN/RS485, 130N grepp, ±0,2mm noggrannhet, DC24V±10%
LINKERBOT Linker Hand O6 Robot Hand, 6 frihetsgrader, 11 leder, CAN/RS485, 130N grepp, ±0,2mm noggrannhet, DC24V±10%
LINKERBOT
Det gick inte att ladda hämtningstillgänglighet
Översikt
LINKERBOT Linker Hand O6 är en robothand designad för kompakt integration och precis manipulation. Den erbjuder 6 DoF med 11 leder (6 aktiva + 5 passiva), snäckväxeldrift för stabil aktivering, CAN/RS485-kontroll och valfri taktil sensorik. Den fingerfärdiga strukturen levererar upp till 130N greppkraft med fem fingrar med ±0,2 mm upprepningsnoggrannhet vid DC24V±10% driftspänning. Den lätta konstruktionen på 370g och det lilla fotavtrycket stödjer logistikhantering, industriell montering och oregelbundna greppscenarier.
Nyckelfunktioner
Kompakt &och Smidig
Kompakt strukturell design minskar utrustningens belastning samtidigt som den ökar flexibiliteten för precis grepp i trånga utrymmen.
Hög hållbarhet
Tillverkad av aluminiumlegering för lätt vikt och slitstyrka, vilket stödjer långsiktig stabil prestanda.
Enhet-Molnintegration
Enhet-molnintegration möjliggör snabb implementering via ett molnbaserat färdighetsbibliotek med förenklad drift och anpassning.
Specifikationer
| Modell | LINKERBOT Linker Hand O6 |
| Frihetsgrader (DoF) | 6 |
| Antal leder | 11 (6 Aktiva + 5 Passiva) |
| Överföringsläge | Skruvväxelöverföring |
| Kontrollgränssnitt | CAN/RS485 |
| Vikt | 370g |
| Maximal belastning | 30kg |
| Driftspänning | DC24V±10% |
| Upprepningsnoggrannhet för positionering | ±0.2mm |
| Taktile sensor | Valfritt |
| Maximal kraft från tumspetsen | 28N |
| Maximal kraft från fyra fingrars spetsar | 33N |
| Maximal greppkraft från fem fingrar | 130N |
| Mått (Utseende) | Höjd 177mm; Bredd 76.5mm; Tjocklek 40mm |
Rörelseomfång
| LF2, RF2, MF2, FF2 (Böjning) | 90° |
| LF1, RF1, MF1, FF1 (Böjning) | 80° |
| TUMME1 (Böjning) | 55° |
| TUMME2 (Böjning) | 30° |
| TUMME3 (Sida - sväng) | 88° |
Vad som ingår
- USB-till-CAN Debugging Kabel ×1
- Connector Kabel XT30 (2+2) ×1
- Strömadapter ×1
- Strömkabel ×1
- Linker Hand O6 x1
För försäljning eller teknisk support, kontakta [email protected] or besök https://rcdrone.top/.
Applikationer
- Logistikhantering och materialöverföring
- Industriell montering och verktygshantering
- Stabilt grepp om oregelbundna former och konsumentartiklar
Manualer
Linker_Hand_O6_Product_Manual.pdf
Detaljer

Linker Hand O6 erbjuder 6 aktiva och 5 passiva leder för ett precist, starkt grepp. Kompakt, hållbar aluminiumdesign passar för logistik, montering och oregelbundet grepp. Har molnintegration för enkel AI-träning utan kodning.


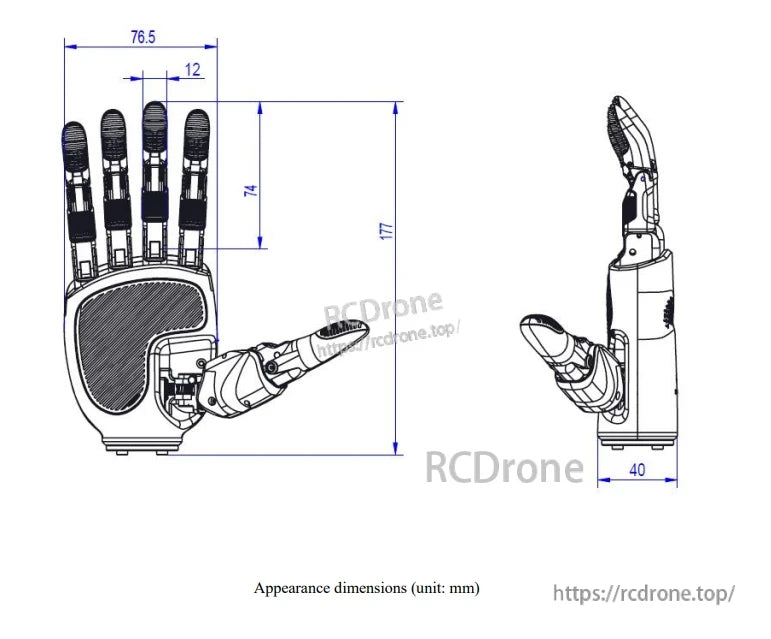
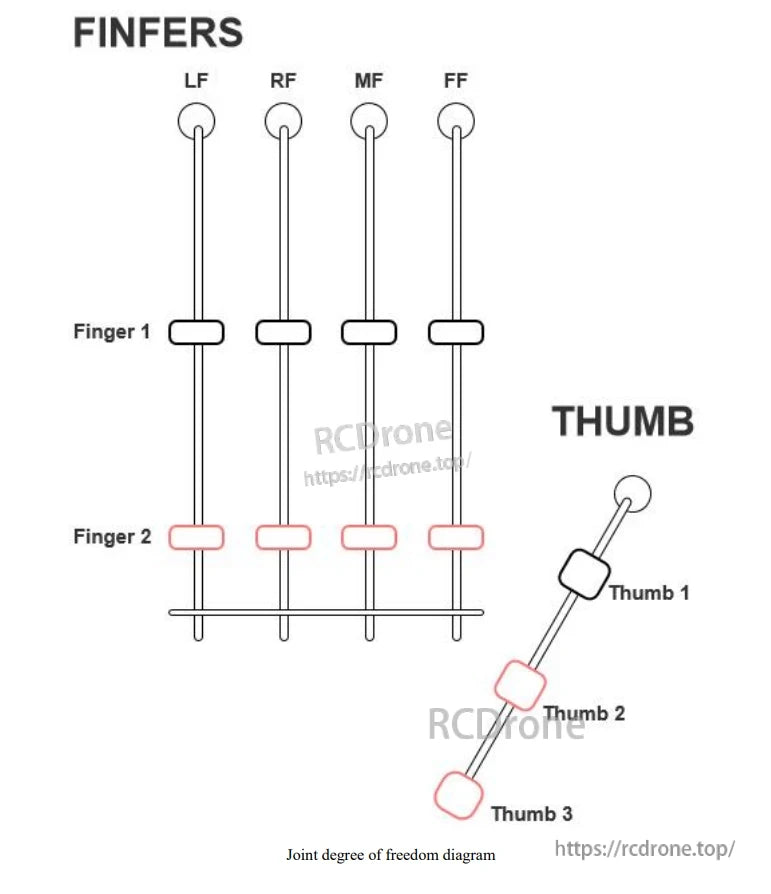
Diagram över fingrars och tumleders frihetsgrader
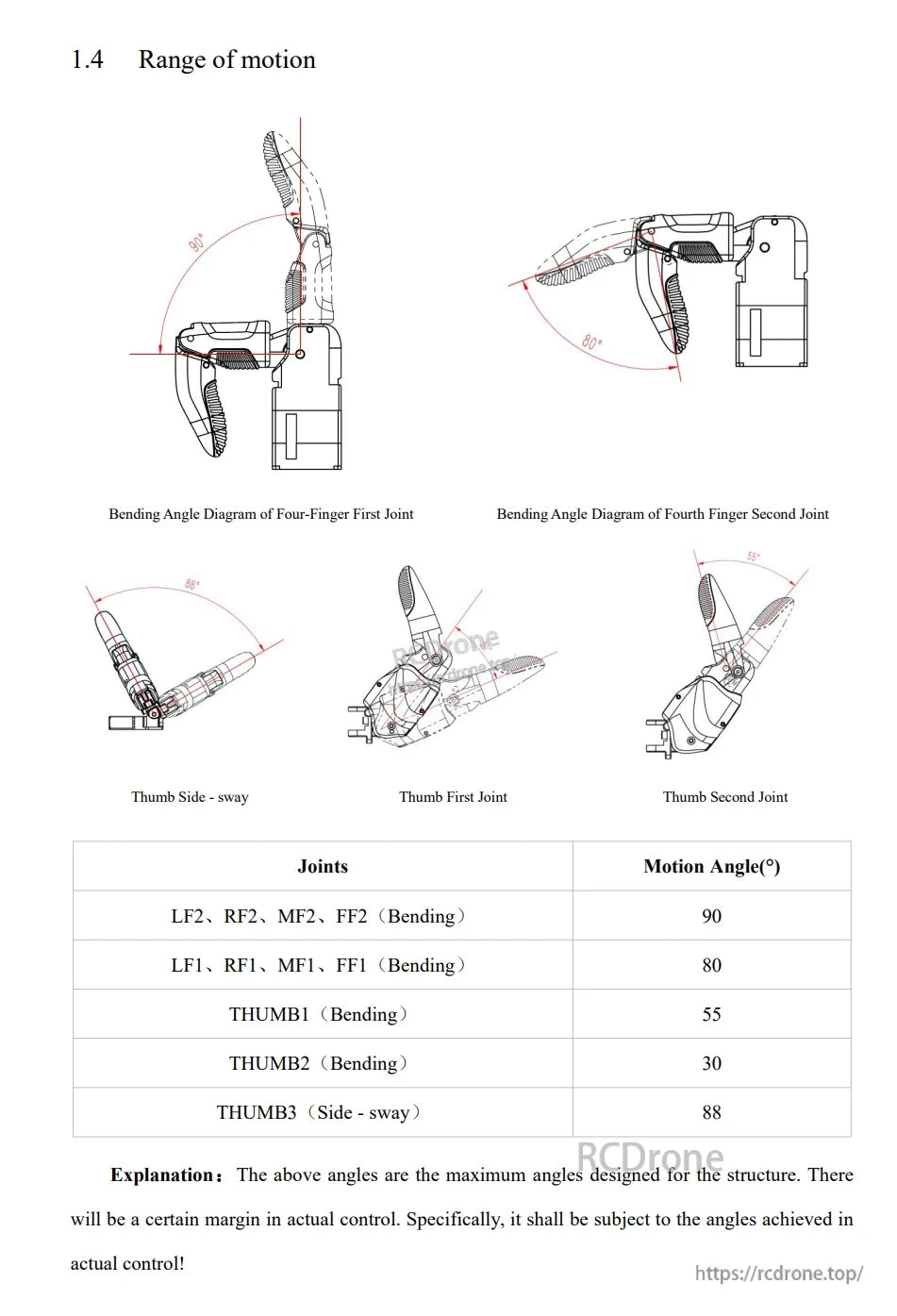
Fingrar böjer sig 80–90°, tummen böjer sig 30–55°, och sidogrepp når 88°. Dessa är designade maximala vinklar; faktisk kontroll kan variera något.
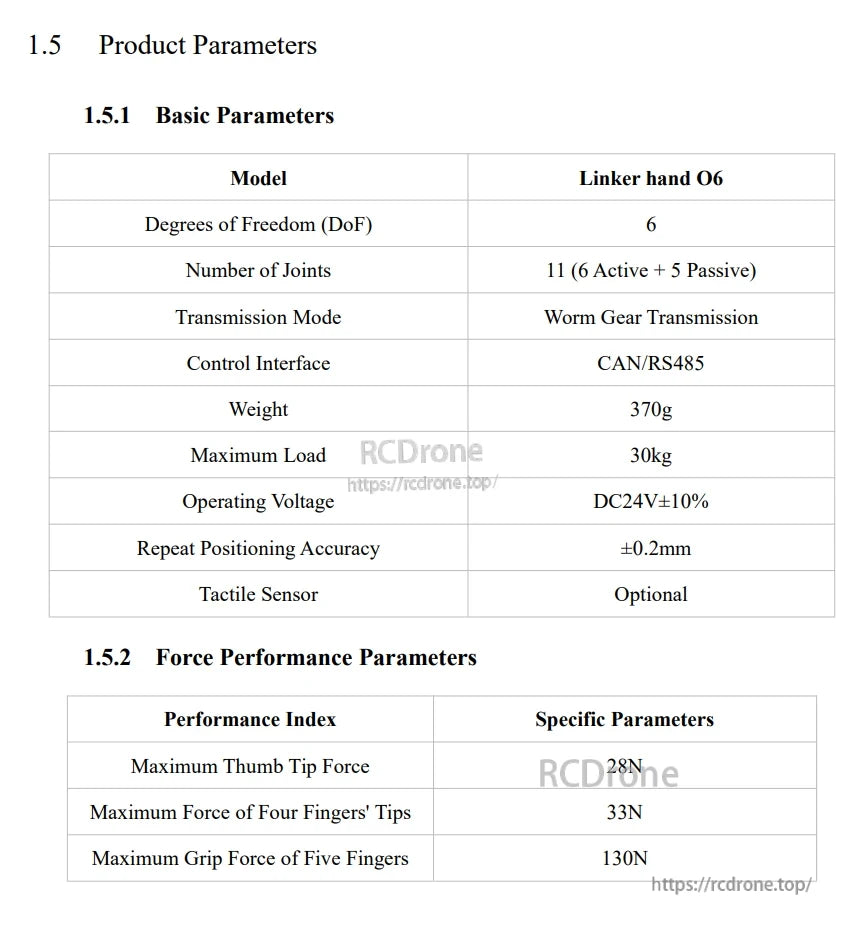
Linker Hand O6 robothand har 6 DoF, 11 leder, maskväxelöverföring, CAN/RS485-kontroll, väger 370g, klarar av 30kg maxlast, fungerar vid DC24V±10%, ±0.2mm noggrannhet, och erbjuder valfria taktila sensorer med specificerad kraftprestanda.

Tillbehörslista för installation av rörlig hand: USB-till-CAN-kabel, XT30-kontakt, strömförsörjning och strömkabel—alla kvantiteter en.
Related Collections







