



LKMTECH MF4005-V2 Motor 12V RS485/CAN 18-bit Magnetisk Encoder DF40V2 Drivalternativ för robotik
LKMTECH MF4005-V2 Motor 12V RS485/CAN 18-bit Magnetisk Encoder DF40V2 Drivalternativ för robotik
LKMTECH
Det gick inte att ladda hämtningstillgänglighet
Översikt
LKMTECH MF4005-V2 är en motor designad för integrerade mekatroniska tillämpningar som kräver lättviktsdesign, hög kontrollnoggrannhet och hög vridmomentutgång. MF4005 V2-uppdateringen framhäver: upplösning av encoder uppgraderad från 14-bit till 18-bit, optimering av cogging vridmoment, PWM-ingångsstöd och CAN/RS485 kommunikation med flera baud-rate alternativ.
Nyckelfunktioner
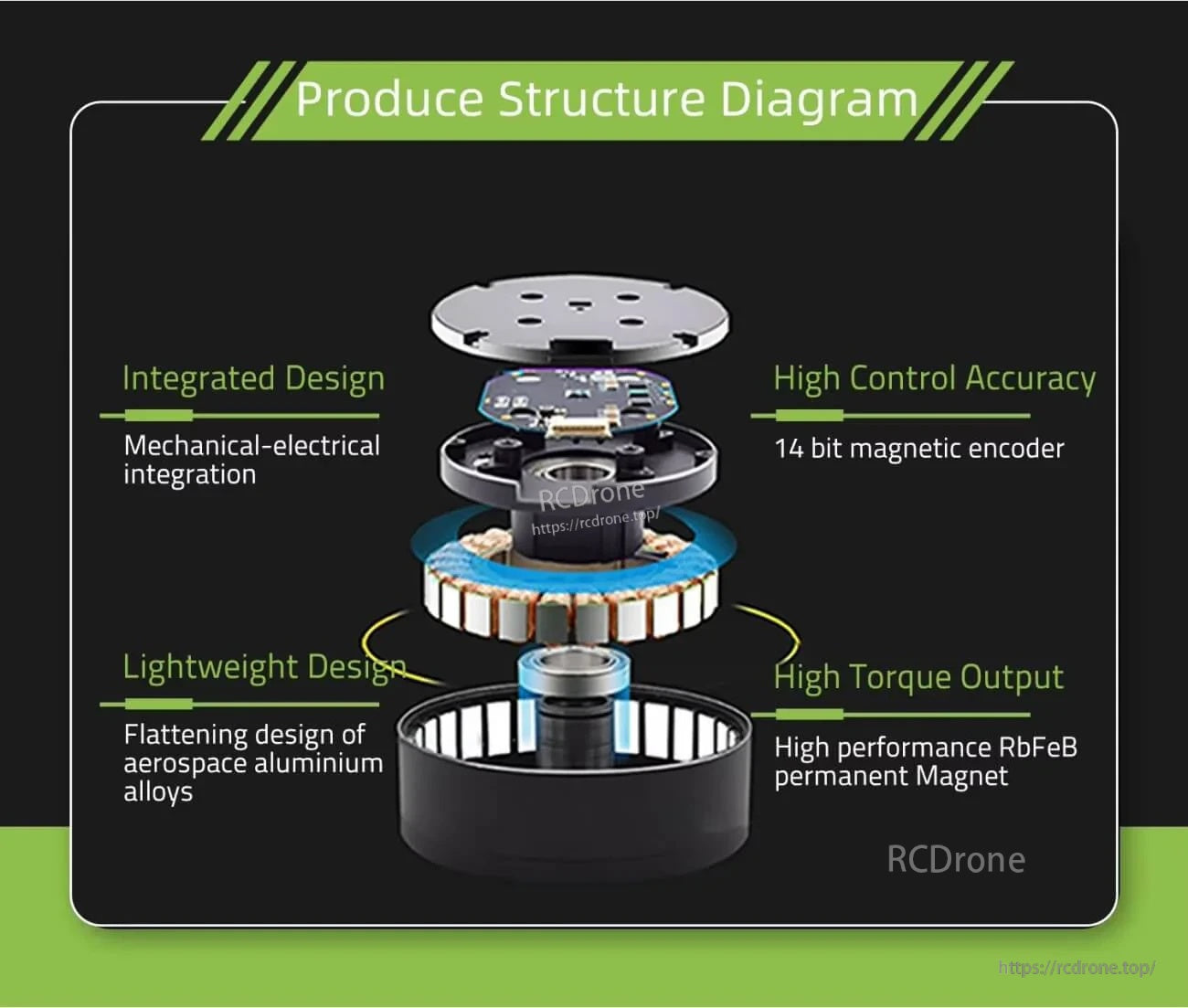
- Integrerad design: mekanisk-elektrisk integration
- Lättviktsdesign: platt design av flygplansaluminiumlegeringar
- Hög kontrollnoggrannhet: magnetisk encoder (MF4005 V2-uppdatering indikerar 14-bit uppgraderad till 18-bit)
- Hög vridmomentutgång: högpresterande RbFeB permanentmagnet
- Stöder PWM-ingång
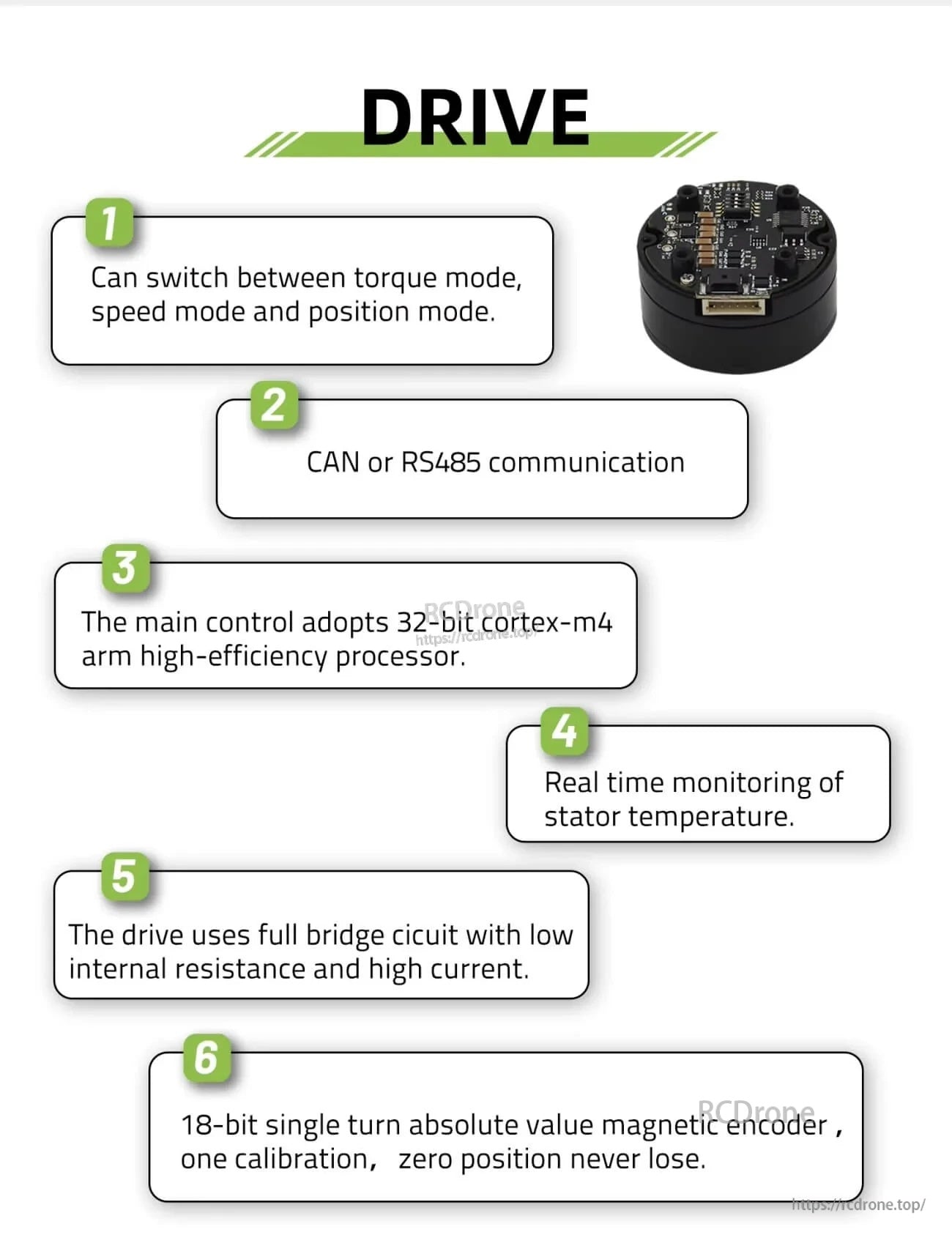
- Kommunikation: CAN eller RS485
- Drivfunktioner: kan växla mellan vridmomentläge, hastighetsläge och positionsläge
- Huvudkontroll: 32-bit Cortex-M4 ARM högeffektprocessor (drivning)
- Realtidsövervakning av statortemperatur (drivning)
- Drivkraftsteg: fullbryggkrets med låg intern resistans och hög ström
- 18-bit enkelvarv absolutvärde magnetisk encoder (drivfunktionstext); en kalibrering, nollposition förloras aldrig
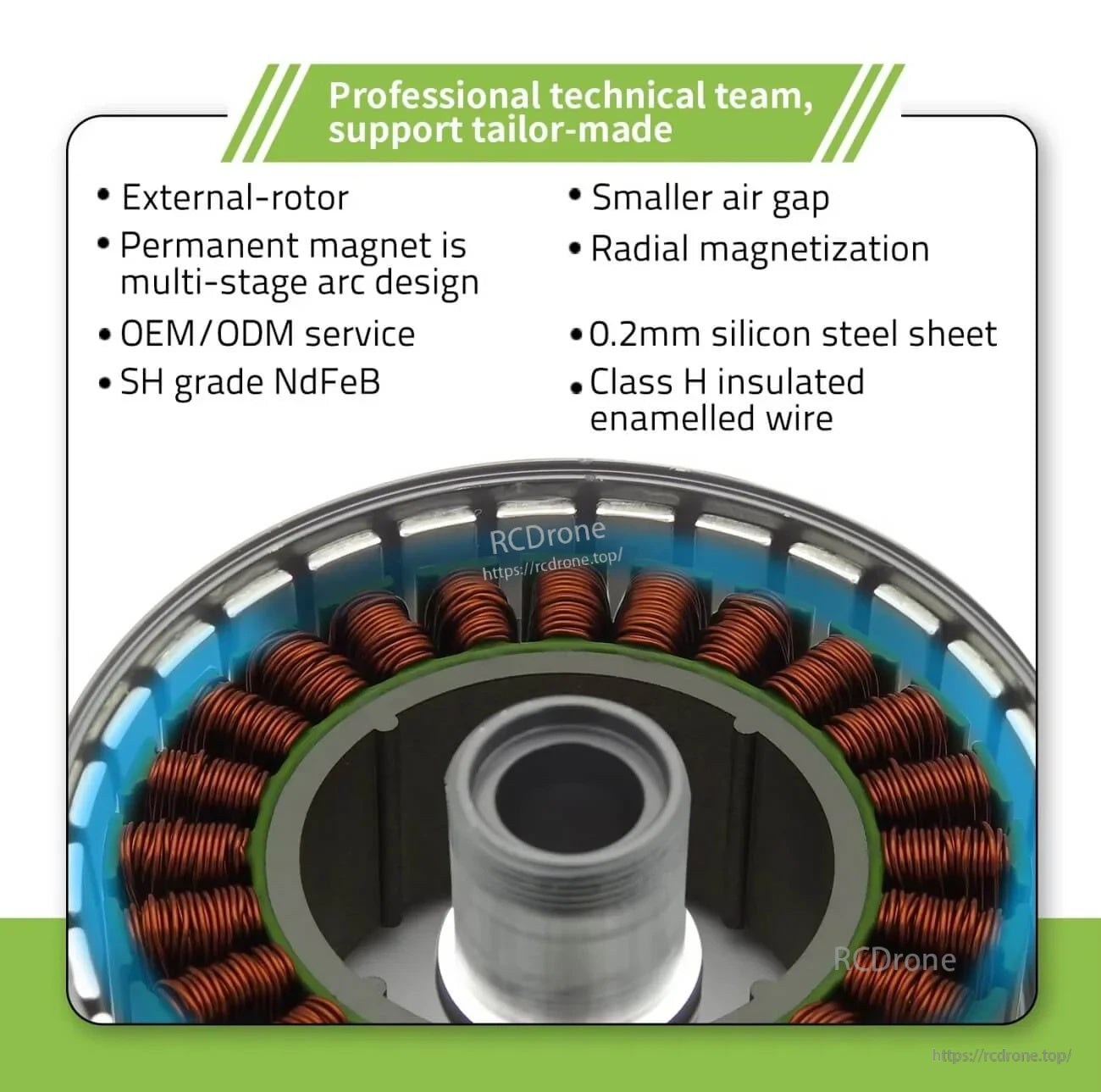
- Motorbyggnadsanteckningar: extern rotor; permanent magnet flertrins bågdesign; mindre luftspalt; radial magnetisering; 0.2 mm silikonstålplåt; klass H isolerad emaljerad tråd; SH klass NdFeB
- OEM/ODM-tjänst (inte en produktspecifikation)
- Parametrar mjukvara: programvara som tillhandahålls för att justera parametrar, testa och uppgradera; stöder öppen källkod utveckling såsom PC, MCU, PLC, ICP och RPi
Tillämpningsscenarier
- Humanoida robotar
- Robotarmar
- Exoskelett
- Fyra-benta robotar
- AGV-fordon
- ARU-robotar
- Kamera PTZ
- Laser Lidar
- Inspektionsrobot för kraftstationer
- Industriell inspektion
Specifikationer
Motormodell: MF4005-V2
| Parameter | Värde (25 varv) | Värde (40 varv) |
|---|---|---|
| Artikelnamn | MF4005-V2 | MF4005-V2 |
| Varv | 25 | 40 |
| Nominal spänning | 12V | 12V |
| Max hastighet | 2390RPM | 1300RPM |
| Nominal vridmoment | 0.07 N.m | 0.06 N.m |
| Bedömd hastighet | 1600RPM | 700RPM |
| Bedömd ström | 1.44A | 0.81A |
| Max effekt | 14W | 4.6W |
| Max vridmoment | 0.25 N.m | 0.12 N.m |
| Hastighetskonstant | 133 rpm/V | 58 rpm/V |
| Vridmoment konstant | 0.05 N.m/A | 0.07 N.m/A |
| Vindningstyp | Y | Y |
| Fasmotstånd | 1.9Ω | 4.3Ω |
| Fasinduktans | 0.5mH | 1.2mH |
| Motorpoler | 26 | 26 |
| Rotorinerti | 56 gcm² | 56 gcm² |
| Motortemperatur | JA | JA |
| Lagrets nominella belastning | 140N | 140N |
| Motorvikt | 65g | 65g |
| Rekommenderad drivning | DF40V2 | DF40V2 |
| Drivningens ingångsspänning | 7.4-32V | 7.4-32V |
| Kommunikation | RS485 ELLER CAN | RS485 ELLER CAN |
| Kommunikationsfrekvens | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| Encoder | 18bit Magnetisk Encoder | 18bit Magnetisk Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Kontrollläge | Momentloop (24KHz) / Hastloop (8KHz) / Positionsloop (8KHz) | Momentloop (24KHz) / Hastloop (8KHz) / Positionsloop (8KHz) |
| Accelerationskurva | Trapezoidal acceleration | Trapezoidal acceleration |
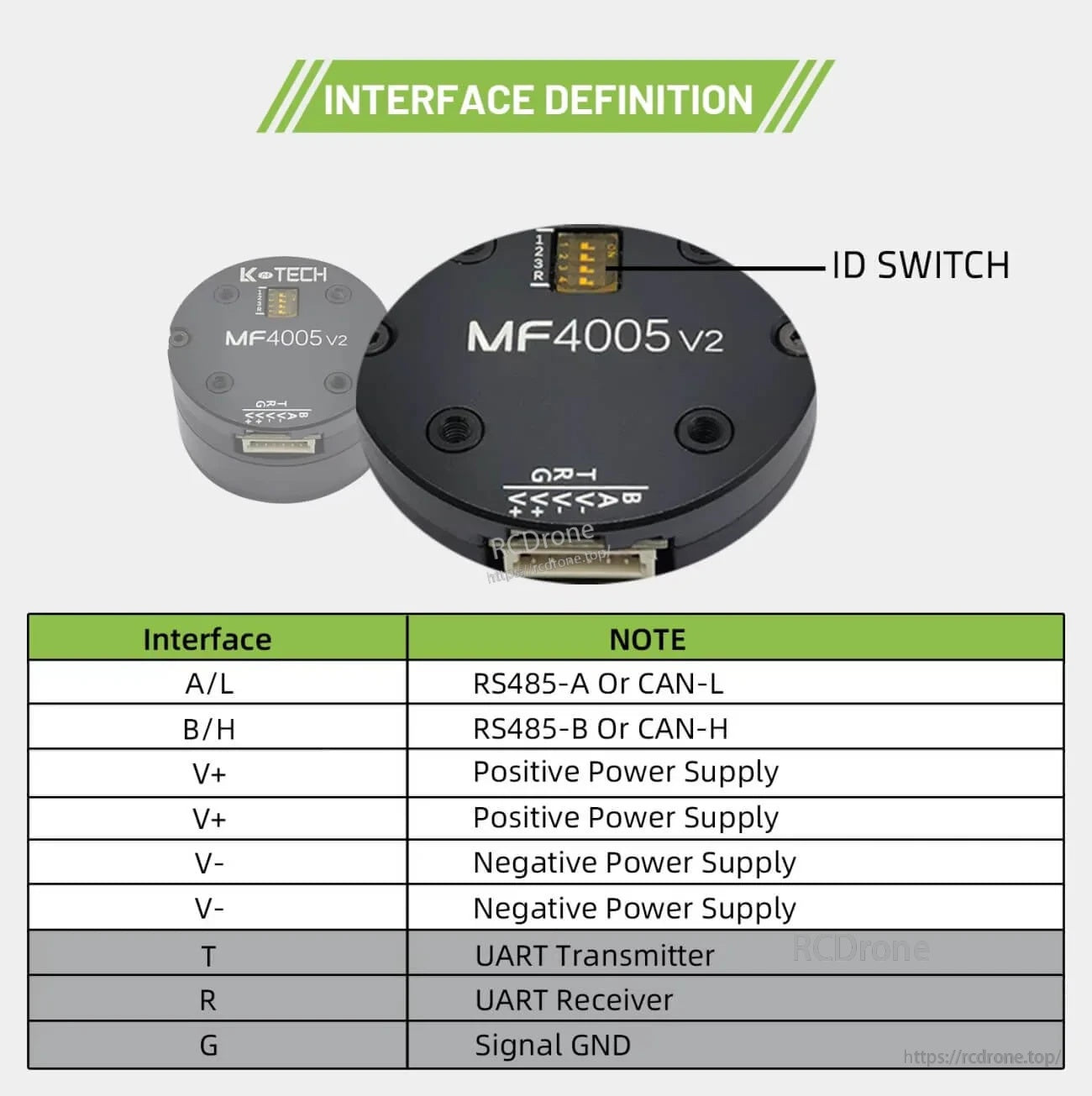
Gränssnittsdefinition
ID-brytare: ID-BRYTARE
| Gränssnitt | Notera |
|---|---|
| A/L | RS485-A eller CAN-L |
| B/H | RS485-B eller CAN-H |
| V+ | Positiv strömförsörjning |
| V+ | Positiv strömförsörjning |
| V- | Negativ strömförsörjning |
| V- | Negativ strömförsörjning |
| T | UART-sändare |
| R | UART-mottagare |
| G | Signal GND |
För förhandsförsäljning eller integrationssupport (RS485/CAN-inställning, baudrateval och CAD-filer), kontakta [email protected] or besök https://rcdrone.top/.
Manualer / Filer
Detaljer

MF4005‑V2 integrerar motor, encoder och drivfunktioner för kompakta robotbyggnader, med en uppgraderad 18‑bitars magnetisk encoder och CAN/RS485 kommunikationsalternativ.
En integrerad, lätt konstruktion kombinerar driv elektroniken med motorenheten för att stödja noggrann kontroll och hög vridmomentutgång.
Extern rotor design och tät lindningslayout hjälper till att balansera storlek, responsivitet och vridmoment för robotleder och aktuatorer.
Kablarna är förenklade med en tydligt märkt kontakt och ID-brytare för bussuppsättningar som använder RS485 eller CAN.
Drivfunktioner inkluderar valbart vridmoment, hastighet och lägen för position, plus realtidsövervakning av statortemperatur över CAN eller RS485.
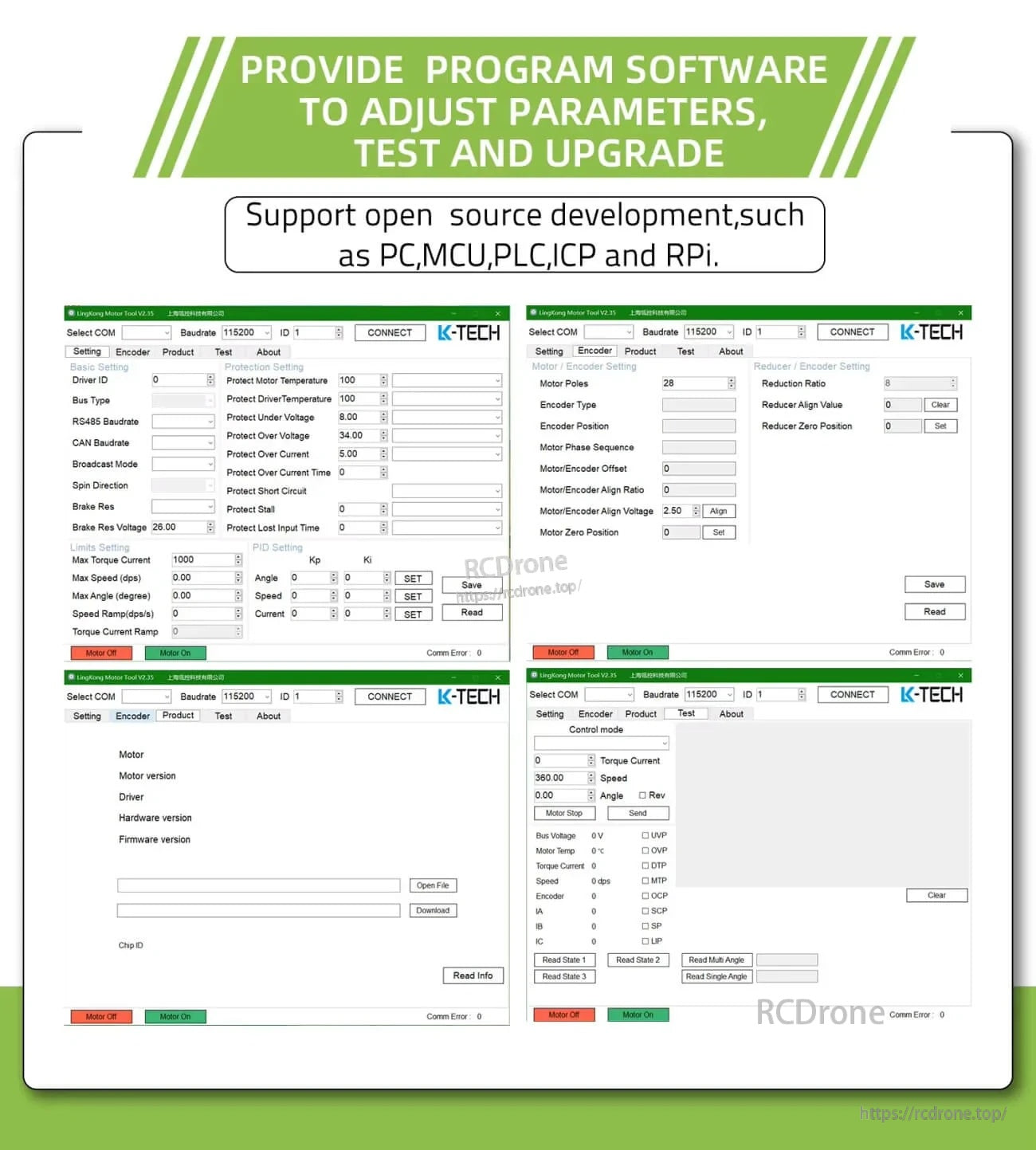
PC-programvarustöd hjälper till med parameterjustering, testning och uppgraderingar, med alternativ som passar utvecklingsarbetsflöden.
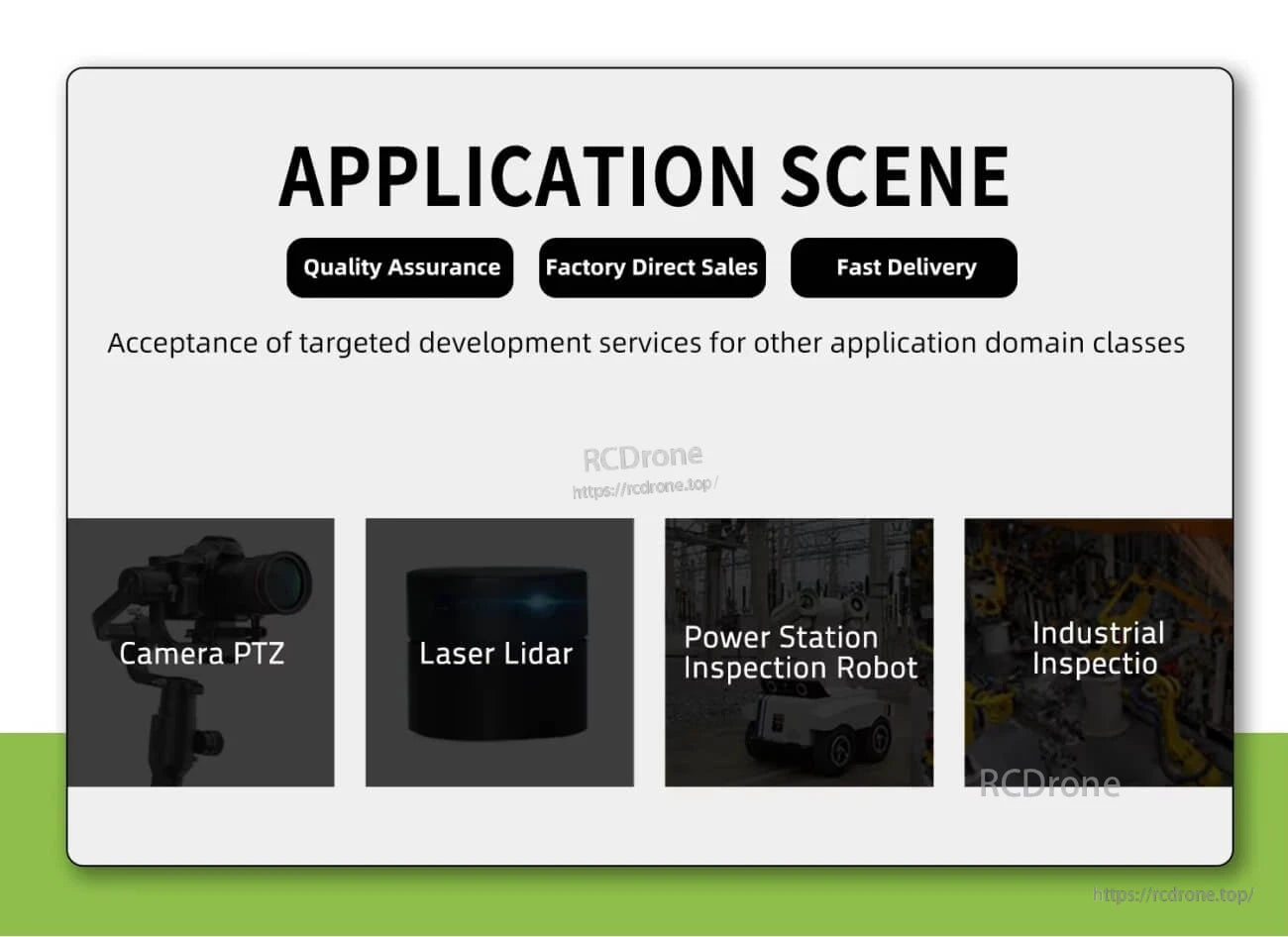
Vanliga tillämpningsområden inkluderar PTZ-kamerahuvuden, lidar-system och inspektionsrobotar som används i industriella miljöer.
Related Collections



