




LKMTECH MG4005E-i10-V3 Planetväxelmotor, 24V 1:10 PG4210, RS485/CAN Dubbel Encoder
LKMTECH MG4005E-i10-V3 Planetväxelmotor, 24V 1:10 PG4210, RS485/CAN Dubbel Encoder
LKMTECH
Det gick inte att ladda hämtningstillgänglighet
Översikt
LKMTECH MG4005E-i10-V3-motorn är en planetväxelmotor designad för robotrörelse och automatiseringsleder som kräver kompakt växling, sluten slinga feedback och busskommunikation. Den integrerar en planetväxelreducerare (PG4210, 1:10) och dubbla absoluta magnetiska encoders (motorsidan + reducerarsidan) för precis kontroll.
Nyckelfunktioner
- Planetväxelmotor: hög effekt, stort vridmoment och hög precision
- Borstlös motor + hög precision planetväxel reducerare
- FOC-kontroll (drift/drivrutin krävs)
- Dubbla encoders: 18-bitars enkelvarvs absolut magnetisk encoder (motorsidan) + 14-bitars enkelvarvs absolut magnetisk encoder (reducerarsidan)
- Reducerarsidans encoder stöder utgång av absolut värde för enkelvarv och kommer ihåg nollpunkten efter strömavbrott
- RS485 eller CAN-buss kommunikation
- Stöder parameterjustering via PC-programvara, test och firmwareuppgradering
- Stöder öppna utvecklingsplattformar: PC, MCU, PLC, industriell dator och Raspberry Pi
- Flera kontrolllägen stöds: Momentläge, Hastighetsläge, Multi-turn kontrolläge, Single-turn position + riktningläge, Incremental positionläge, Multi-turn kontrolläge (med hastighetsbegränsning), Single-turn position + riktningläge (med hastighetsbegränsning), Increment positionläge (med hastighetsbegränsning)
- Dubbla temperatursensorgränssnitt övervakar temperaturerna på motor och drivning i realtid
- Reserverad bromsfunktion (Broms / Bromsfrisättning)
- Flera skyddsfunktioner listade: UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP
För integrationssupport och förhandsbekräftelse, kontakta https://rcdrone.top/ eller e-posta [email protected].
Specifikationer
| Artikelnamn | MG4005E-i10-V3 |
| Nominell spänning | 24V |
| Max hastighet | 320RPM |
| Nominellt vridmoment | 1 N.m |
| Nominell hastighet | 255RPM |
| Nominell ström | 1.8A |
| Max effekt | 65W |
| Max vridmoment | 2.5 N.m |
| Hastighetskonstant | 106.3rpm/V |
| Vridmomentkonstant | 0.06 N.m/A |
| Varv | 28 |
| Vindningstyp | Y |
| Fasresistans | 1.4Ω |
| Fasinduktans | 0.5mH |
| Motorpoler | 28 |
| Rotormoment | 140gcm² |
| Motortemperatur | JA |
| Reducerart | PG4210 |
| Reduceringsförhållande | 1:10 |
| Backlash | ≤10 arcmin |
| Lagrets nominella belastning | 1000N |
| Motovikt | 183g |
| Rekommenderad drivning | DG40E |
| Drivspänning | 7.4-32V |
| Kommunikation | RS485 eller CAN |
| Kommunikationsfrekvens | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| Encoder | 18-bit (motor) + 14-bit (reducer) magnetisk encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M |
| Kontrollläge | Momentloop (24KHz) / Hastloop (8KHz) / Positionsloop (4KHz) |
| Accelerationskurva | Trapezoidal acceleration |
Gränssnittsdefinition
| Gränssnitt | Notera |
|---|---|
| A/H | RS485-A eller CAN-H |
| B/L | RS485-B eller CAN-L |
| V- | Negativ strömförsörjning |
| V+ | Positiv strömförsörjning |
| A/H | RS485-A eller CAN-H |
| B/L | RS485-B eller CAN-L |
| T | UART-sändare |
| R | UART-mottagare |
| G | Signal GND |
Tillämpningar
- Humanoida robotar
- Robotarmar
- Exoskelett / bärbara robotar
- Kvadruped robotar / robot hund
- AGV-fordon / AGV-bil
- ARU-robotar
Manualer / Filer
Detaljer

MG4005E-i10-V3 kombinerar en borstlös motor med en planetväxel i en kompakt form för robotleder och automatiseringsaxlar.

Dubbla enkelturspunkts absoluta magnetiska encoders ger feedback från motor- och utgångssidan, med en dedikerad ID-brytare för bussinställningar.
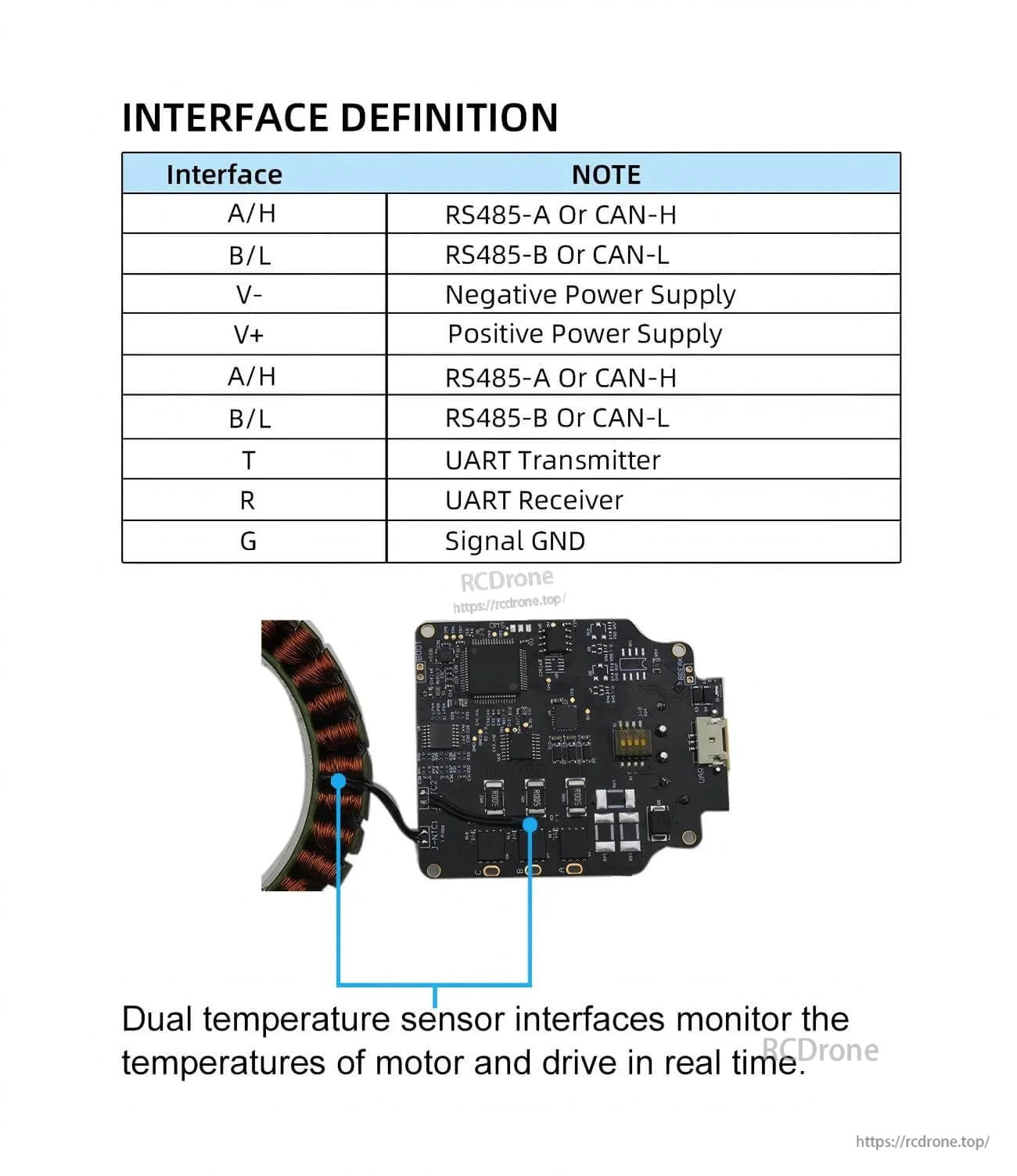
Kablaget är förenklat med tydligt definierade terminaler för ström, RS485/CAN-kommunikation och UART-signalkopplingar.
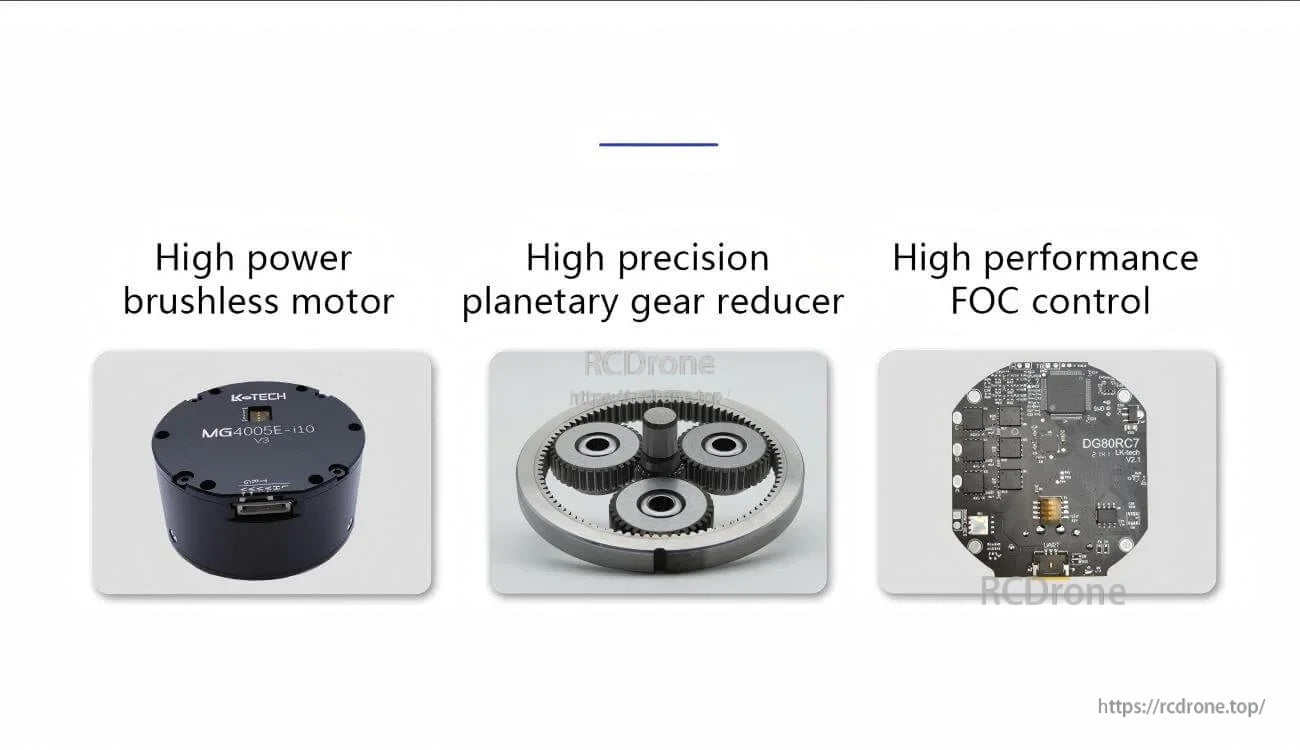
En borstlös motor, precisionsplanetväxel och FOC-kontroll stödjer smidig vridmomentleverans och noggrann rörelsekontroll.

Driften stöder RS485 eller CAN-kommunikation och ett brett ingångsspänningsområde (7,4–32V) för flexibel integration.
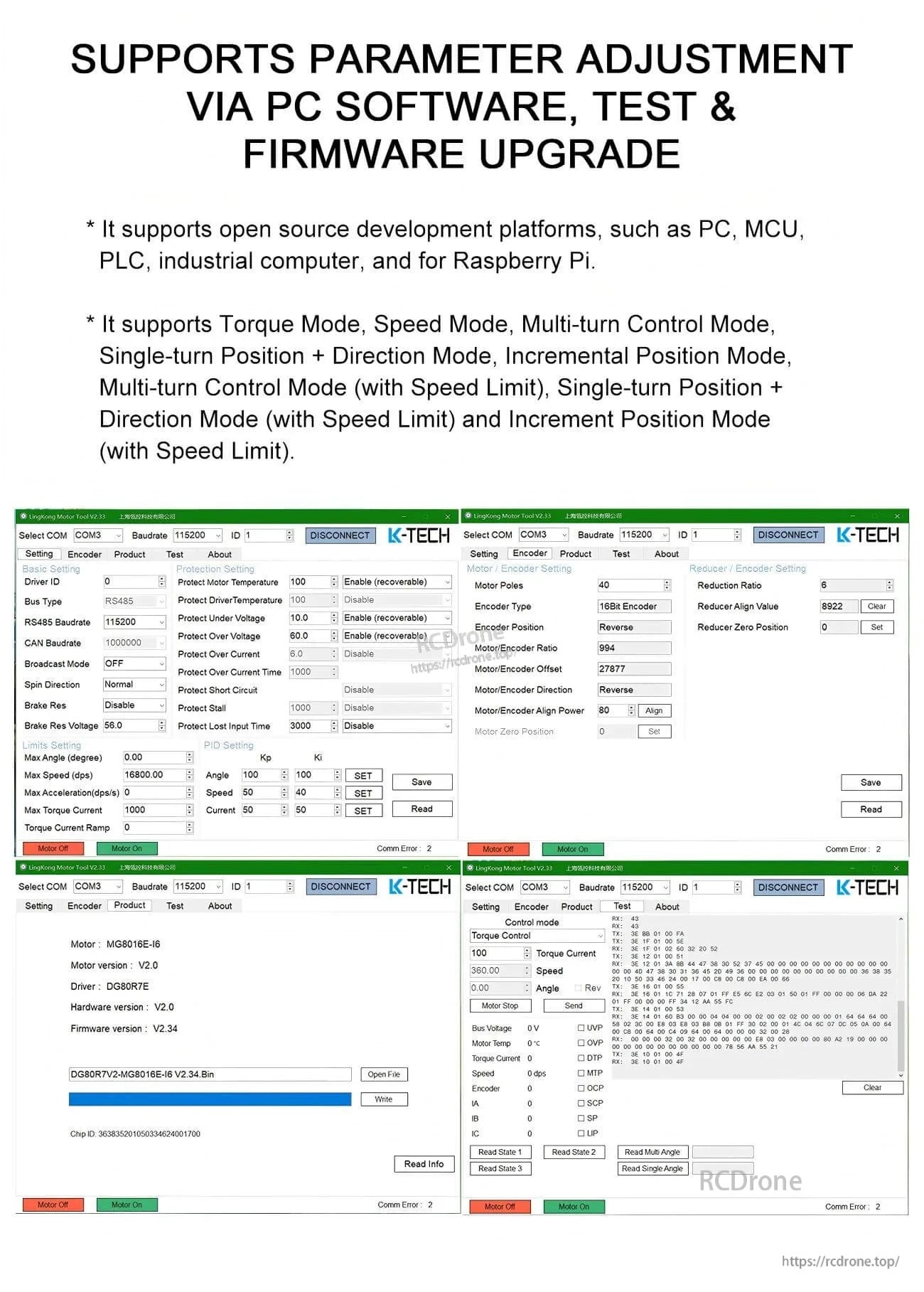
PC-programvara möjliggör parameterjustering, funktionstestning och firmwareuppgraderingar under idrifttagning och underhåll.
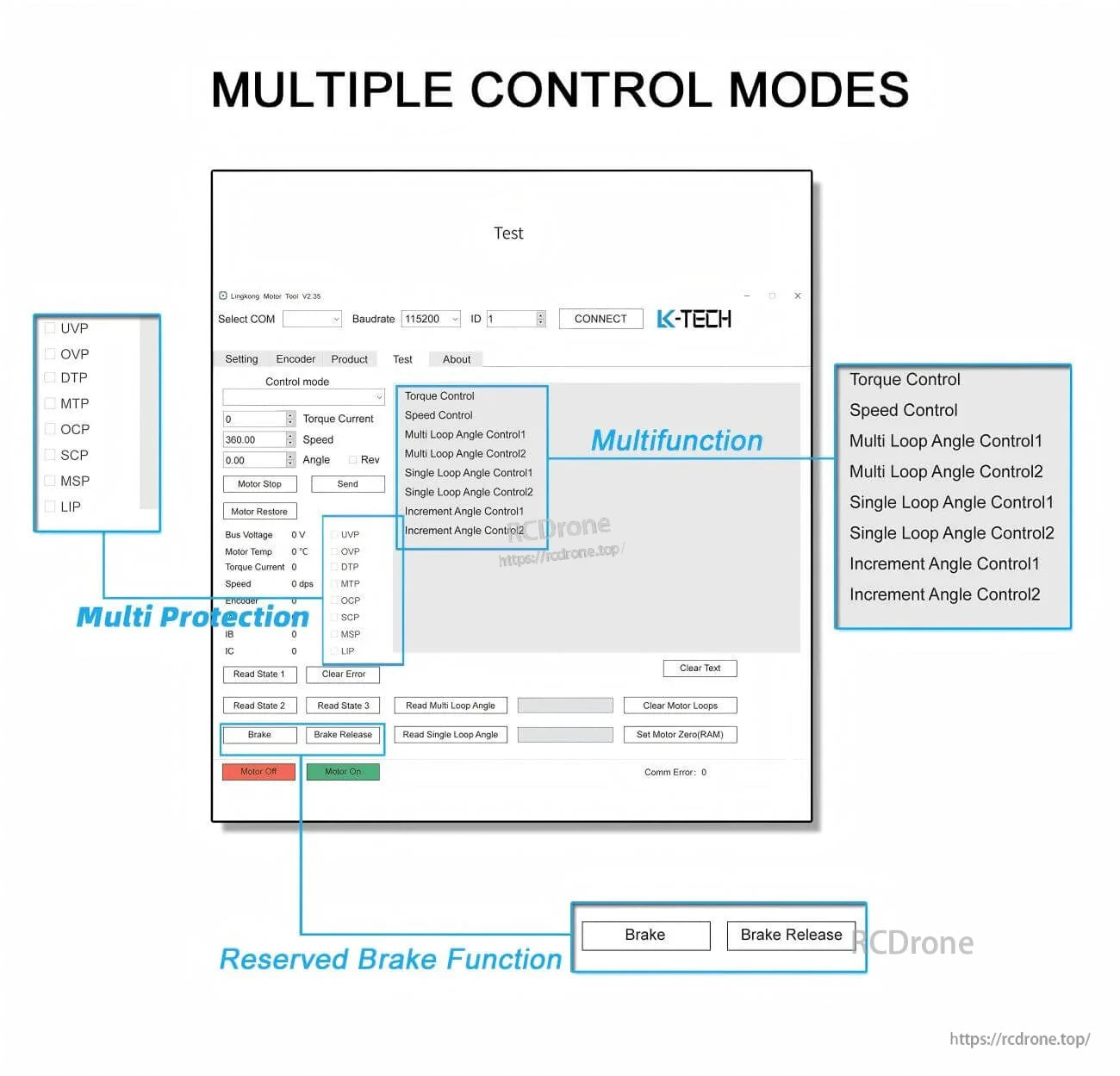
Välj mellan flera kontrolllägen såsom vridmoment, hastighet och positionskontroll, med inbyggd skyddsstatusövervakning.
Designad för kompakt aktivering i mobila robotar, ledade armar, fyrbenta robotar och bärbar robotik.
Related Collections




