




LKMTECH MG4010E-i10-V3 Motor 24V 320RPM 2.5N.m Planetväxel 1:10 RS485/CAN Encoder
LKMTECH MG4010E-i10-V3 Motor 24V 320RPM 2.5N.m Planetväxel 1:10 RS485/CAN Encoder
LKMTECH
Det gick inte att ladda hämtningstillgänglighet
Översikt
LKMTECH MG4010E-i10-V3-motorn är en borstlös motor med en planetväxel och absoluta magnetiska encoders, designad för robot- och automationsaktuatorer som kräver hög precision, stort vridmoment och stabil sluten loop-kontroll. Den stöder RS485 eller CAN-busskommunikation och fungerar med den rekommenderade DG40E-drivningen (ingångsspänning 7,4-32V).
Nyckelfunktioner
- Hög standarddesign; hög effekt, stort vridmoment, hög precision
- Hög effekt borstlös motor + hög precision planetväxel reducerare
- Högpresterande FOC-kontroll (drivrelaterad funktion)
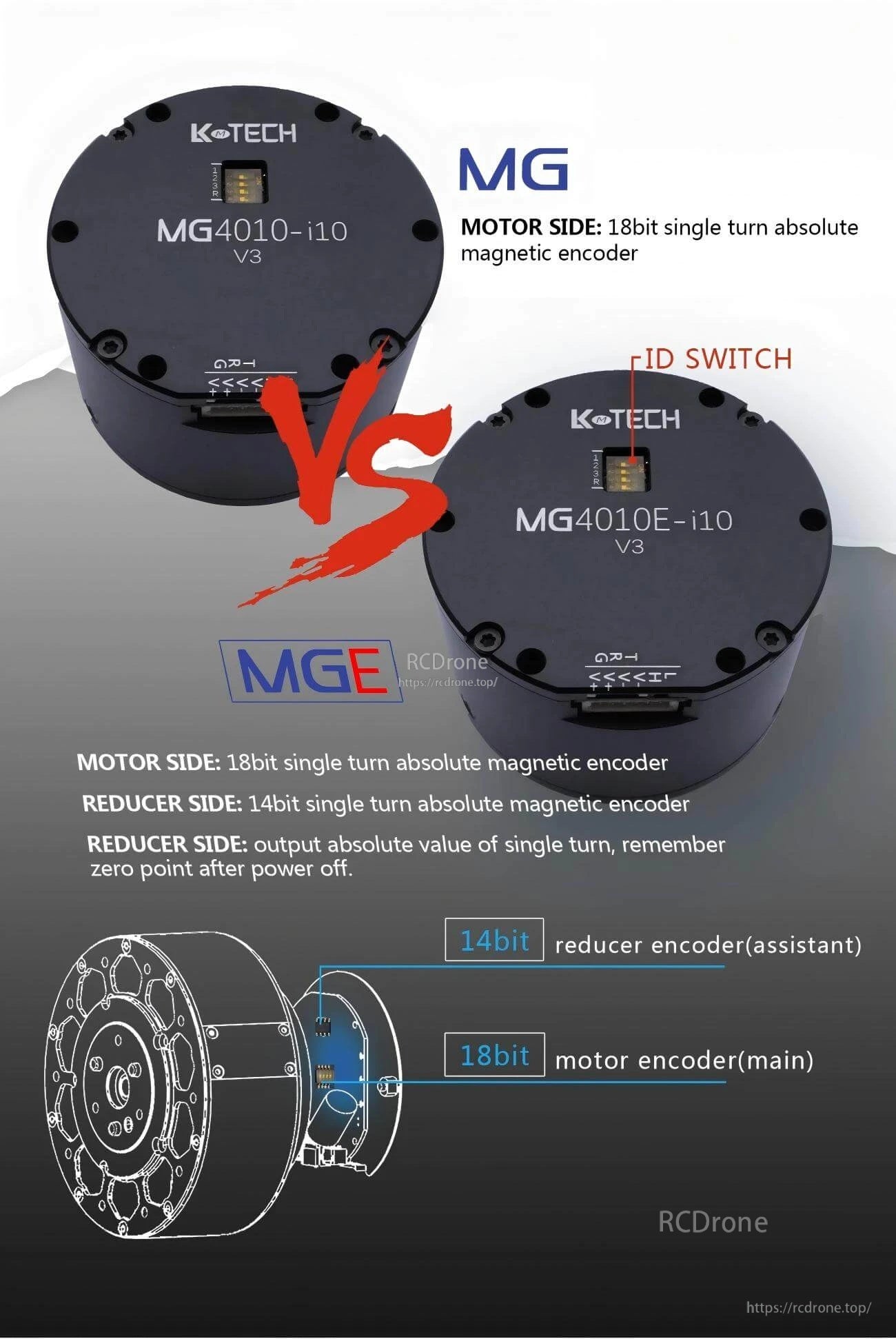
- Dubbla encoders; kommer ihåg nollpunkt efter strömavbrott (absolut värdeutgång för en varv)
- Motor-sidan encoder: 18-bitars envarvs absolut magnetisk encoder
- Reducerare-sidan encoder: 14-bitars envarvs absolut magnetisk encoder
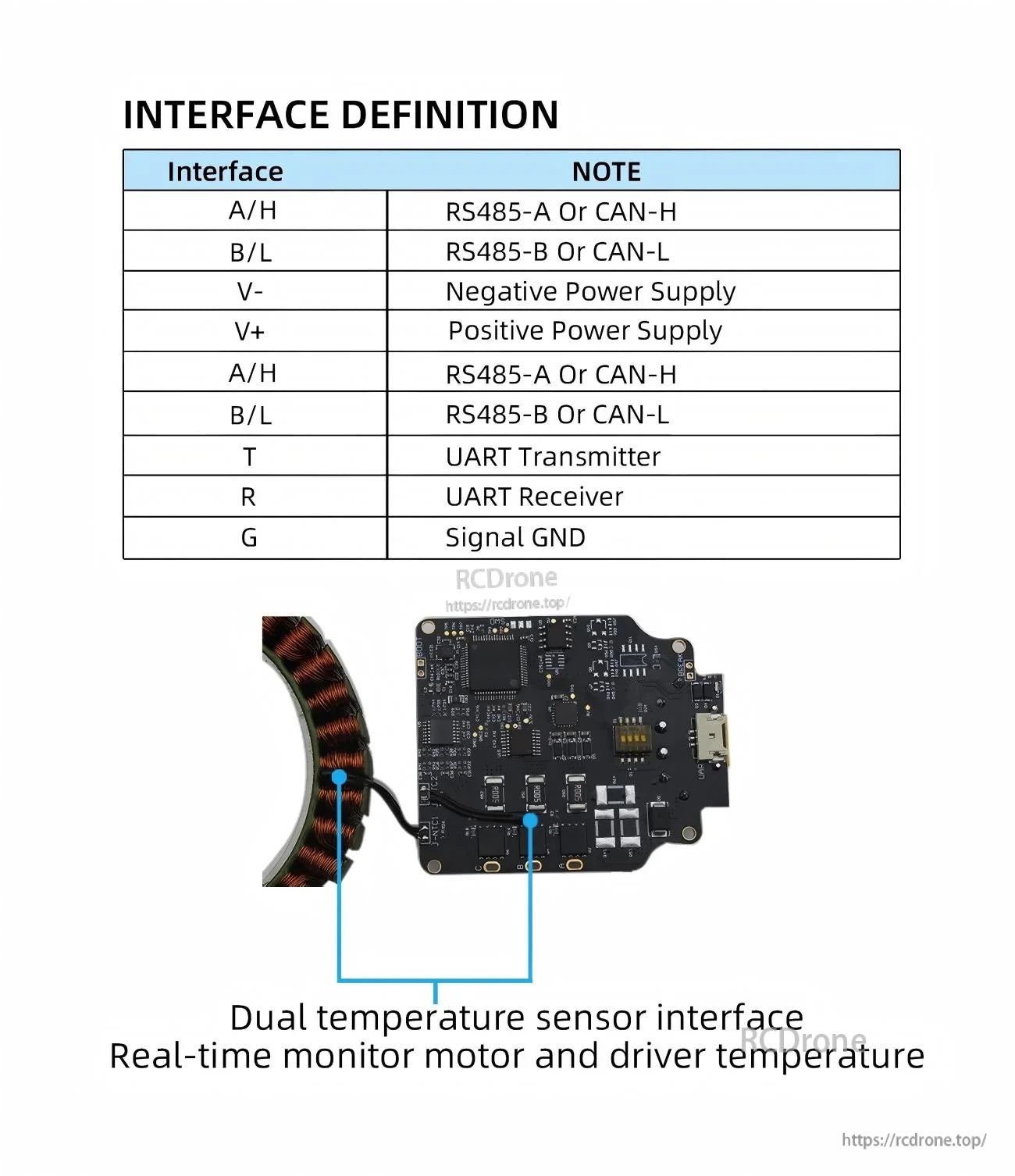
- Dubbla temperatursensorgränssnitt för realtidsövervakning av motor- och drifttemperatur (motortemperatur: JA)
- ID-brytare (visas på motorhöljet)
Specifikationer
| Artikelnamn | MG4010E-i10-V3 |
| Nominell spänning | 24V |
| Max hastighet | 320RPM |
| Nominell hastighet | 260RPM |
| Betygsatt vridmoment | 2.5N.m |
| Max vridmoment | 4.5N.m |
| Nominell ström | 3.5A |
| Max effekt | 140W |
| Hastighetskonstant | 108.3rpm/V |
| Vridmomentkonstant | 0.07N.m/A |
| Varv | 14 |
| Vindningstyp | Y |
| Fasmotstånd | 0.604Ω |
| Fasinduktans | 0.28mH |
| Motorpoler | 28 |
| Rotormoment | 202gcm² |
| Motortemperatur | JA |
| Reducerart | PG4210 |
| Reduceringsförhållande | 1:10 |
| Backlash | ≤8 arcmin (bildtexten anger också: växelbacklash 6 arcmin) |
| Lagrets nominella belastning | 1000N |
| Motorvikt | 250g |
| Storlek | Φ53*41 |
| Rekommenderad drivning | DG40E |
| Drivningens ingångsspänning | 7.4-32V |
| Kommunikation | RS485 ELLER CAN |
| Kommunikationsfrekvens | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18bit(motor)+14bit(reducer)Magnetisk Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M |
| Kontrollläge | Momentloop (24KHz)/Hastighetsloop (8KHz)/Positionsloop (4KHz) |
| Accelerationskurva | Trapezoidal acceleration |
Gränssnittsdefinition
| A/H | RS485-A Eller CAN-H |
| B/L | RS485-B Eller CAN-L |
| V- | Negativ strömförsörjning |
| V+ | Positiv strömförsörjning |
| A/H | RS485-A eller CAN-H |
| B/L | RS485-B eller CAN-L |
| T | UART-sändare |
| R | UART-mottagare |
| G | Signal GND |
Tillämpningsscenarier
- Humanoida robotar
- Robotarmar
- Exoskelett
- Kvadrupedrobotar
- AGV-fordon / AGV-bil
- ARU-robotar
- Robot hund
- Bärbar robot
För integrationsfrågor (RS485/CAN-inställningar, val av encoder baud rate eller drivmatchning), kontakta [email protected] or besök https://rcdrone.top/.
Manualer
Detaljer

Byggd för robotikaktuatorer som behöver hög vridmoment, hög precision och stabil sluten loopkontroll.

RS485 eller CAN-busskommunikation stöder flexibel integration med vanliga robotkontroller och drifter.
Dubbla absoluta encoders (motor + reducer) hjälper till att behålla nollpunkten efter strömavbrott för upprepbar positionering.
Pin-definitioner gör det enklare att koppla ström och välja RS485/CAN-kommunikation under integration.

Den 1:10 planetära reduceraren är optimerad för kompakt vridmomentutgång i trånga aktuator utrymmen.
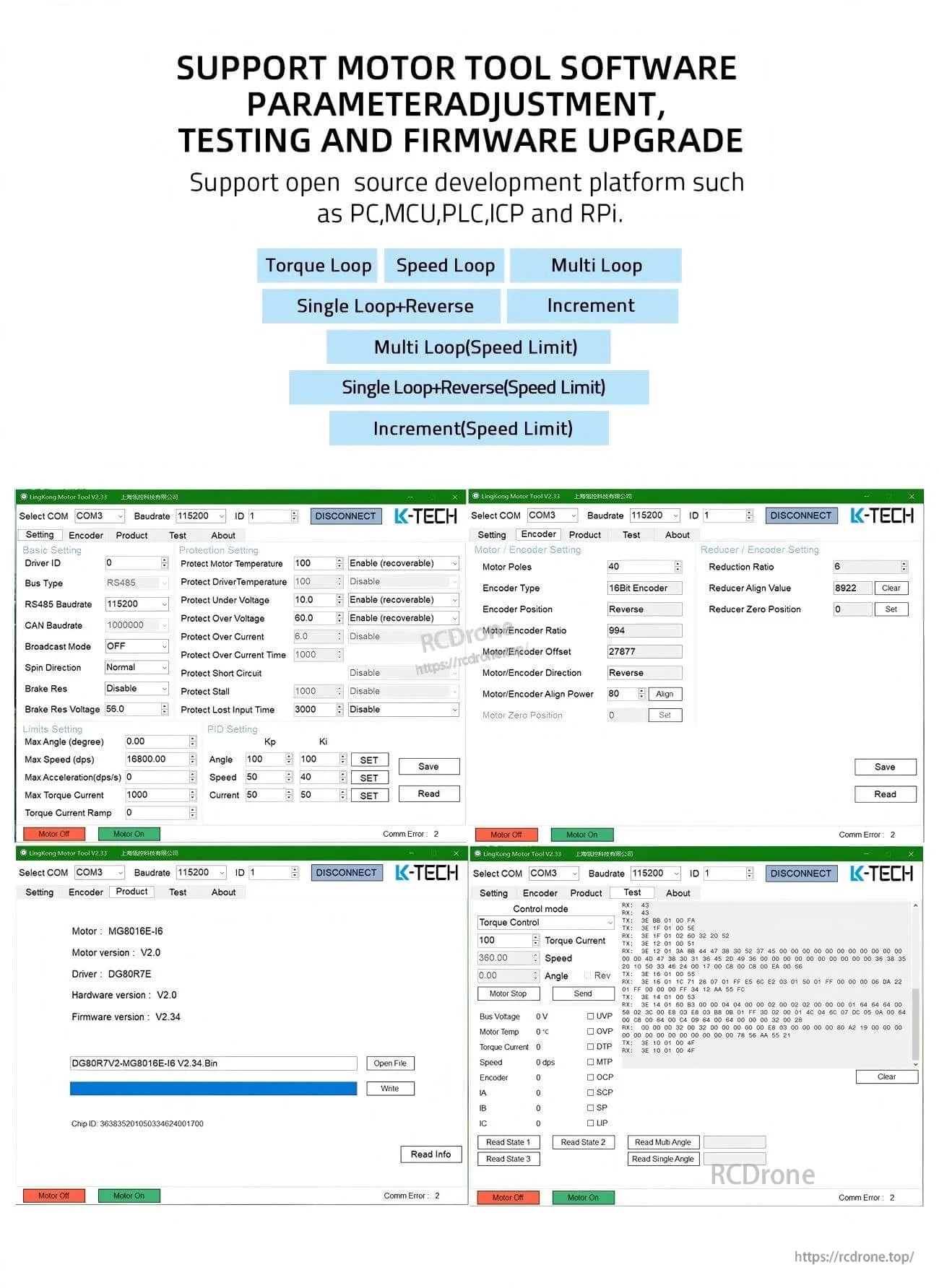
PC-verktygsprogramvara stöder parameterjustering, funktionstestning och firmwareuppgraderingar under idrifttagning.
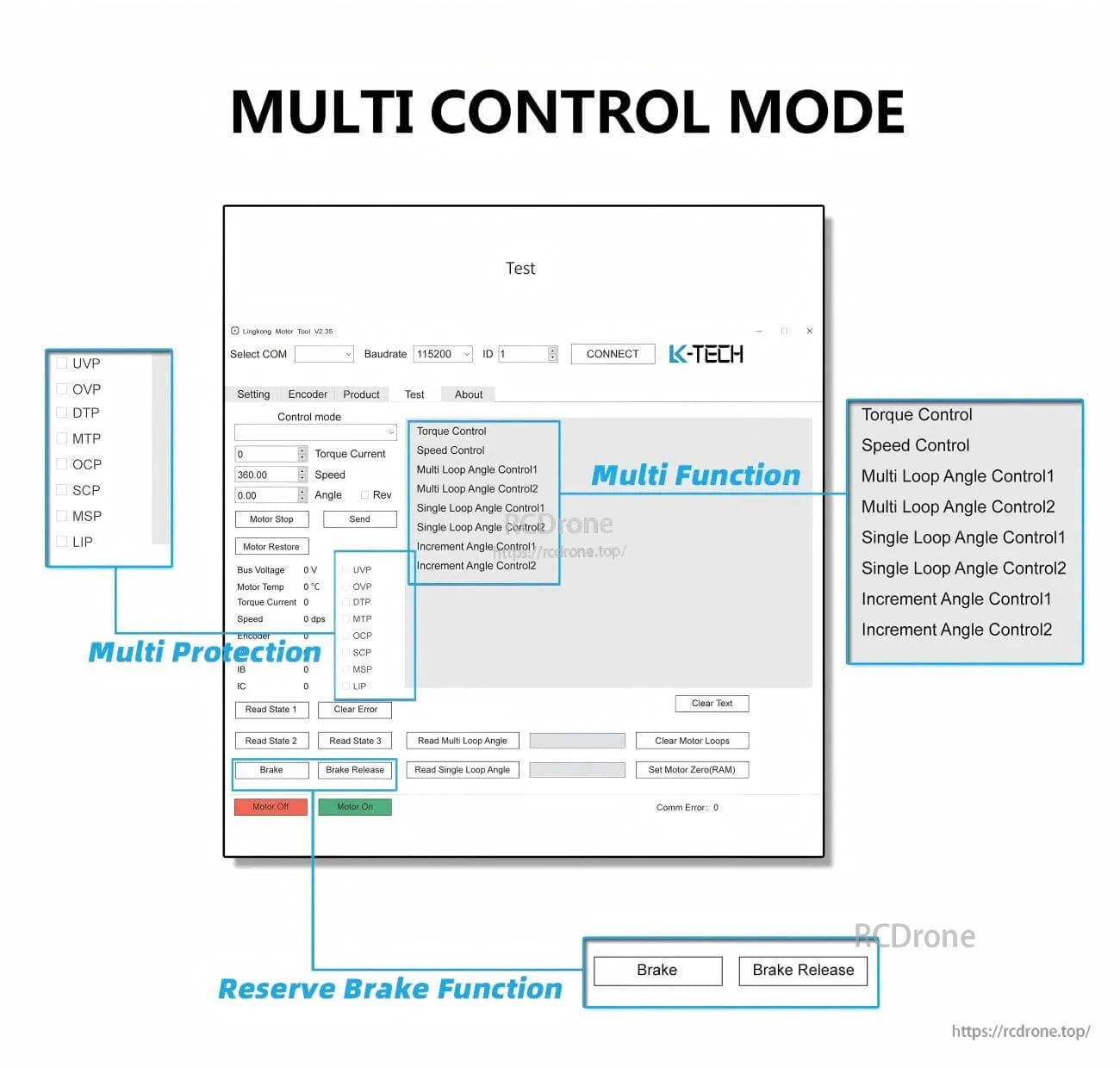
Flera kontrolllägen och skyddsalternativ stöder vridmoment, hastighet och positionsslingsarbetsflöden.
Passar för AGV:er, robotarmar, fyrbenta robotar och bärbara robotleder där exakt växling och feedback krävs.
Related Collections




