




LKMTECH MG4010E-i10B-V3 planetväxelmotor med broms, 24V 320RPM, RS485/CAN, 18-bitars encoder
LKMTECH MG4010E-i10B-V3 planetväxelmotor med broms, 24V 320RPM, RS485/CAN, 18-bitars encoder
LKMTECH
Det gick inte att ladda hämtningstillgänglighet
Översikt
LKMTECH MG4010E-i10B-V3 motor är en planetväxelmotor med broms, designad för robotik och automatiseringsaktuatorer som kräver kompakt storlek, växlad vridmomentutgång och fältbusskommunikation (RS485 eller CAN). Den använder en 18-bitars magnetisk encoder och stöder vridmoment-, hastighets- och positionskontrollslingor.
Nyckelfunktioner
- Två steg med bromsar planetväxelmotor (MG4010E-i10B serie)
- Utväxlingsförhållande: 1:10; Vridmomentspel: 8 arcmin (även specificerat som ≤8 arcmin)
- 18-bitars enkelvarv absolut magnetisk encoder (18-bitars magnetisk encoder)
- Kommunikation: RS485 eller CAN
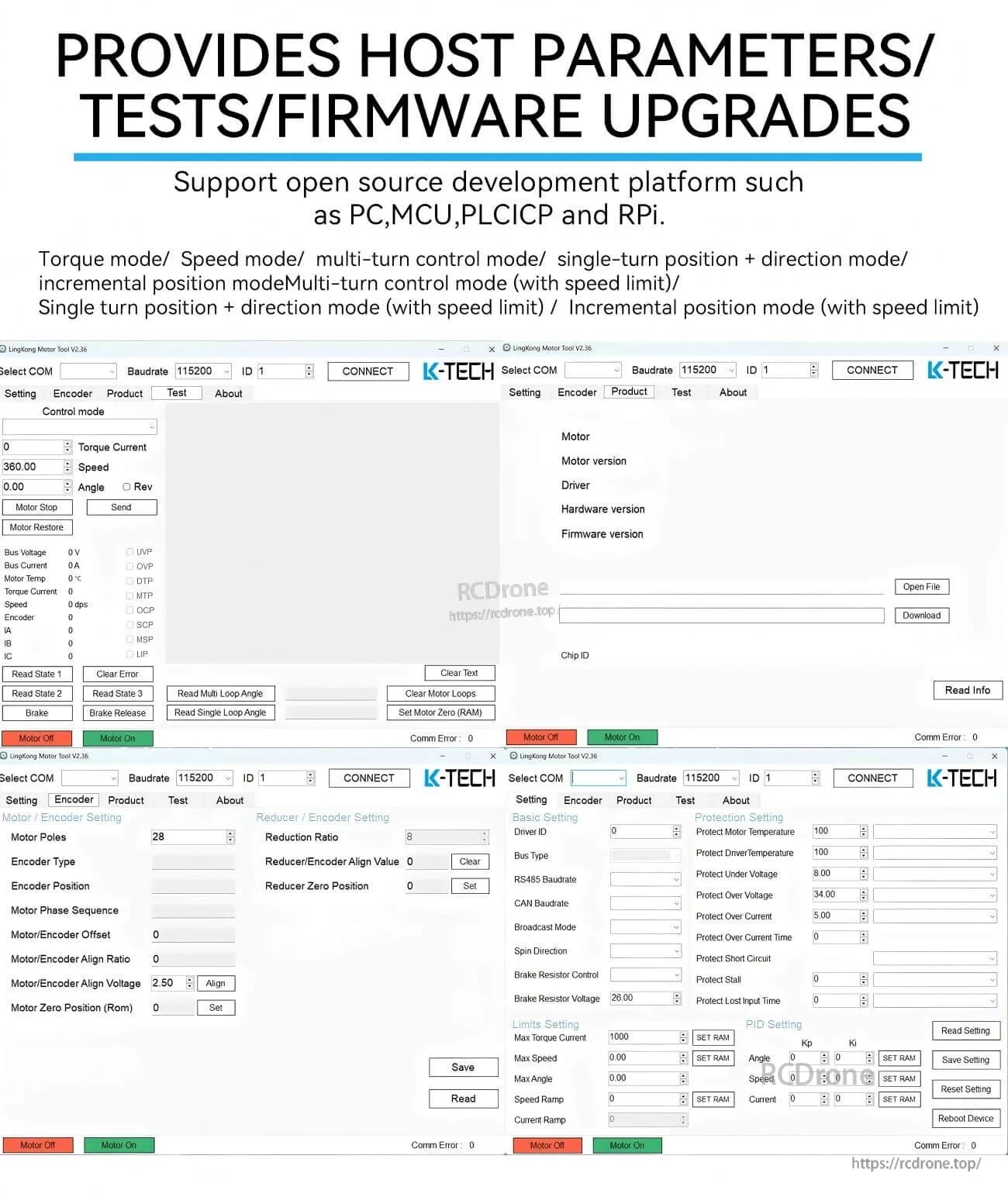
- Kontrolllägen/slingor: Vridmomentloop (32KHz) / Hastighetsloop (8KHz) / Positionsloop (4KHz)
- Accelerationskurva: Trapezoidal acceleration
- Inbyggd broms; Bromstyp BG4906; Bromsvridmoment 3.2 N.m
- Gränssnittsfunktioner: ID-brytare
- Drivrelaterad text som visas: Inbyggd broms; RS485 eller CAN-busskommunikation; Dubbelencoder, kom ihåg nollpunkt efter strömavbrott; Ingångsspänning 12-60V
Specifikationer
| Artikelnamn | MG4010E-i10B-V3 |
| Nominell spänning | 24V |
| Max hastighet | 320RPM |
| Nominell hastighet | 260RPM |
| Nominellt vridmoment | 2.5N.m |
| Max vridmoment | 4.5N.m |
| Nominell ström | 3.5A |
| Max effekt | 140W |
| Hastighetskonstant | 108.3rpm/V |
| Vridmomentkonstant | 0.07N.m/A |
| Vänder | 14 |
| Vindningstyp | Y |
| Fasmotstånd | 0.604Ω |
| Fasinduktans | 0.28mH |
| Motorpoler | 28 |
| Rotorinerti | 202gcm² |
| Motortemperatur | JA |
| Reducerart | PG4210 |
| Reduceringsförhållande | 1:10 |
| Backlash | ≤8 arcmin |
| Lagerbelastning | 1000N |
| Motorvikt | 392g |
| Bromstyp | BG4906 |
| Bromsmoment (N.m) | 3.2N.m |
| Startspänning (V) | 24V |
| Upprätthållande spänning (V) | 7V |
| Upprätthållande effekt (W) | 1.4W |
| Rekommenderad drivrutin | DG40 |
| Drivspänning | 7.4-32V |
| Kommunikation | RS485 ELLER CAN |
| Kommunikationsfrekvens | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18-bit magnetisk encoder |
| Encoder baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M |
| Kontrollläge | Momentloop (32KHz)/Hastighetsloop (8KHz)/Positionsloop (4KHz) |
| Accelerationskurva | Trapezoidal acceleration |
| Motordimension | Φ 59*37 |
| Växelspel | 8 arcmin |
Gränssnittsdefinition
- ID-brytare
| Port | Instruktioner |
|---|---|
| A/H | RS485-A eller CAN-H |
| B/L | RS485-B eller CAN-L |
| V- | Negativ strömförsörjning |
| V+ | Positiv strömförsörjning |
| A/H | RS485-A eller CAN-H |
| B/L | RS485-B eller CAN-L |
| T | UART-sändare |
| R | UART-mottagare |
| G | Signal GND |
Tillämpningar
- Humanoida robotar
- Robotarmar
- Exoskelett / Exoskelettrobot
- Fyra-benta robotar / Mecha Dog
- AGV-fordon / AGV-bil
- ARU-robotar
- Tjänsterobot
- Handhållen lidar
- Rehabiliteringsträningsrobot
- Inspektionsrobot
Manualer
För integrationssupport och frågor före försäljning, kontakta [email protected] or besök https://rcdrone.top/.
Detaljer

En kompakt MG4010E-i10B-V3 planetväxelmotor med integrerad broms, 1:10 reduktion och ≤8 bågminuters backlash för precisa robotleder.
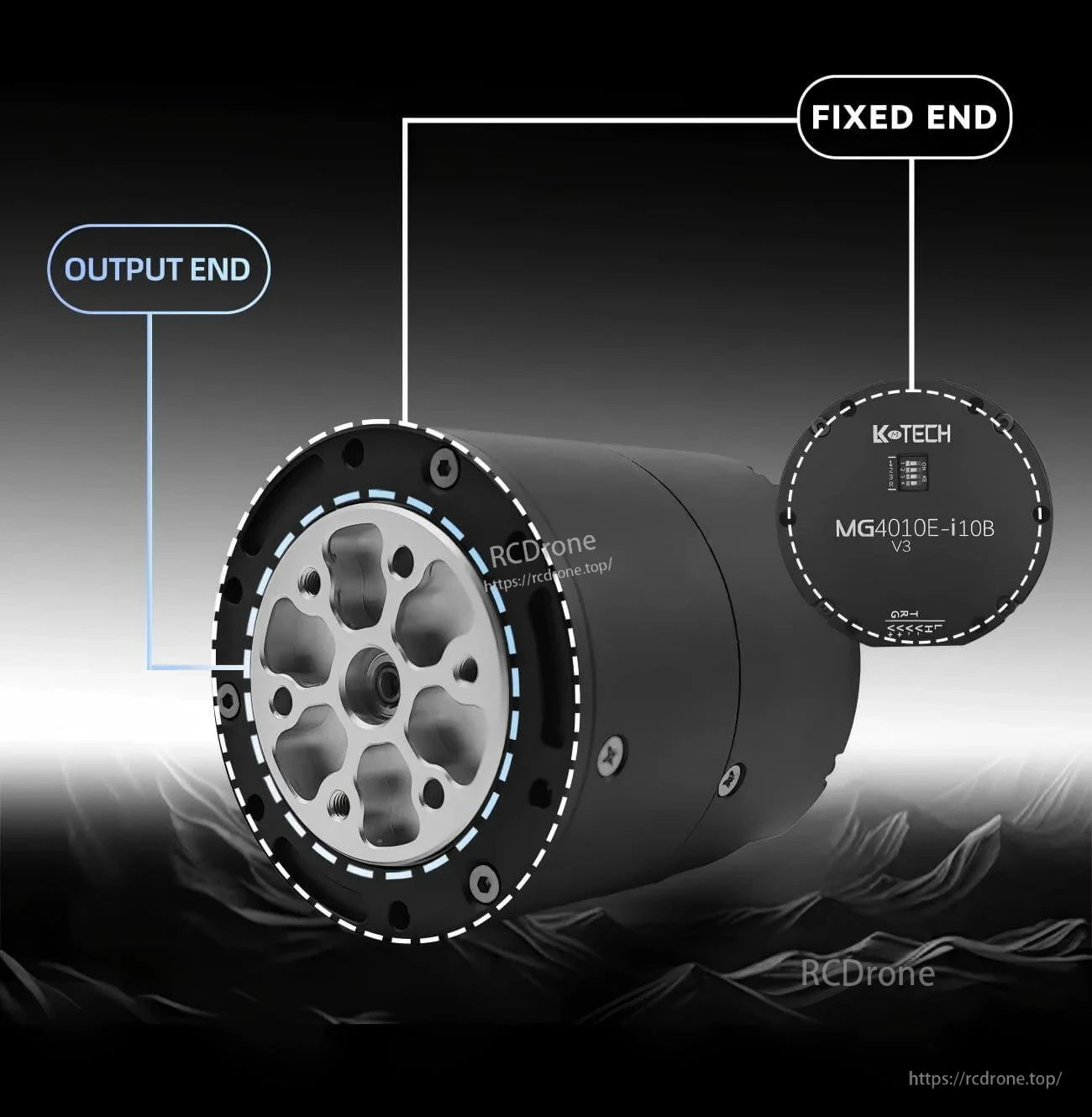
Tydlig identifiering av utgångsänden jämfört med den fasta änden hjälper till att förenkla den mekaniska layouten och ledningsorienteringen under integration.

En 18-bitars enkelvarvs absolut magnetisk encoder och RS485/CAN-buss stödjer vridmoment, hastighet och positionskontroll för automatiseringsaktuatorer.
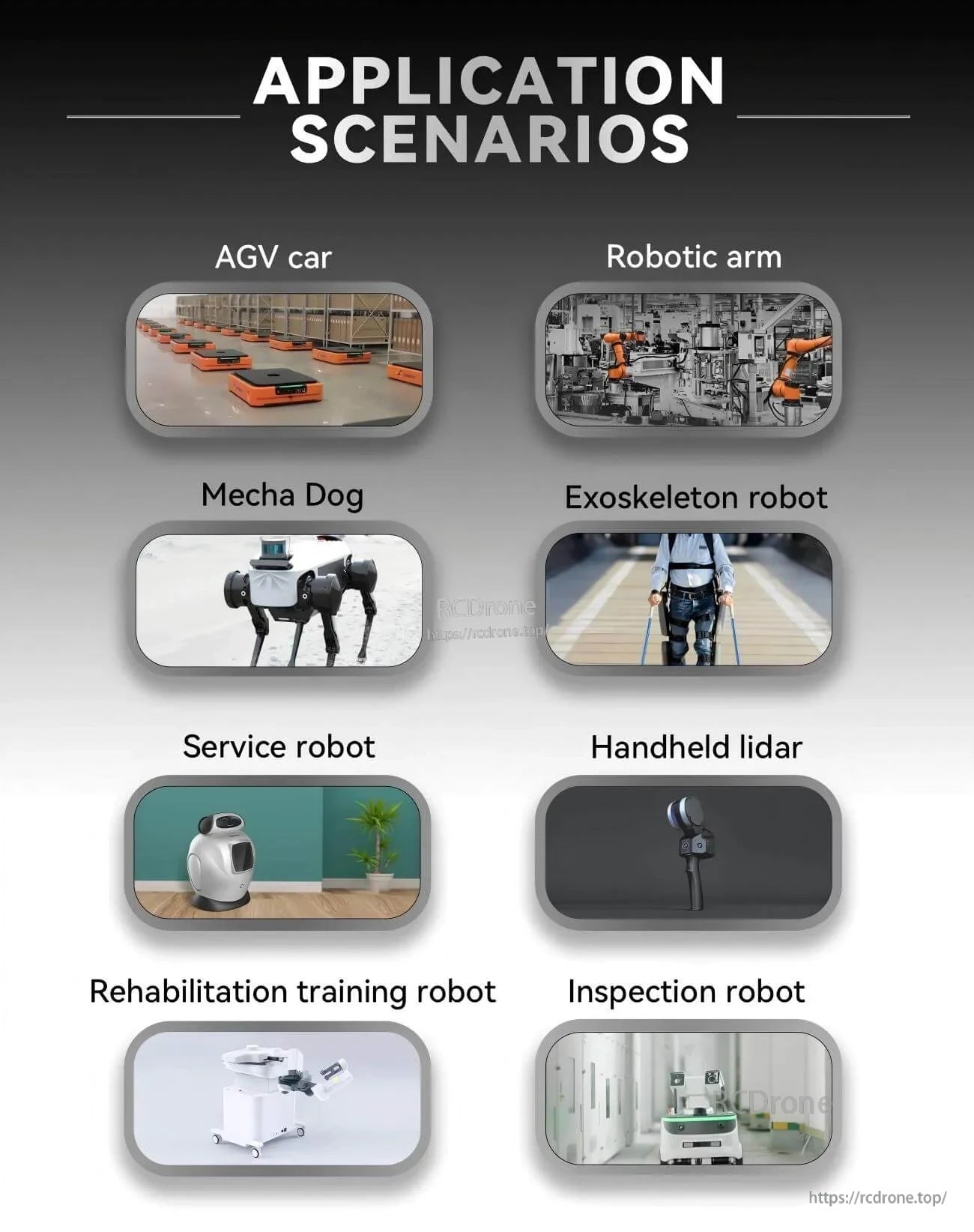
Designad för robotik och automatiseringsanvändningar inklusive AGVs, robotarmar, fyrbenta robotar, exoskelett och inspektionsplattformar.
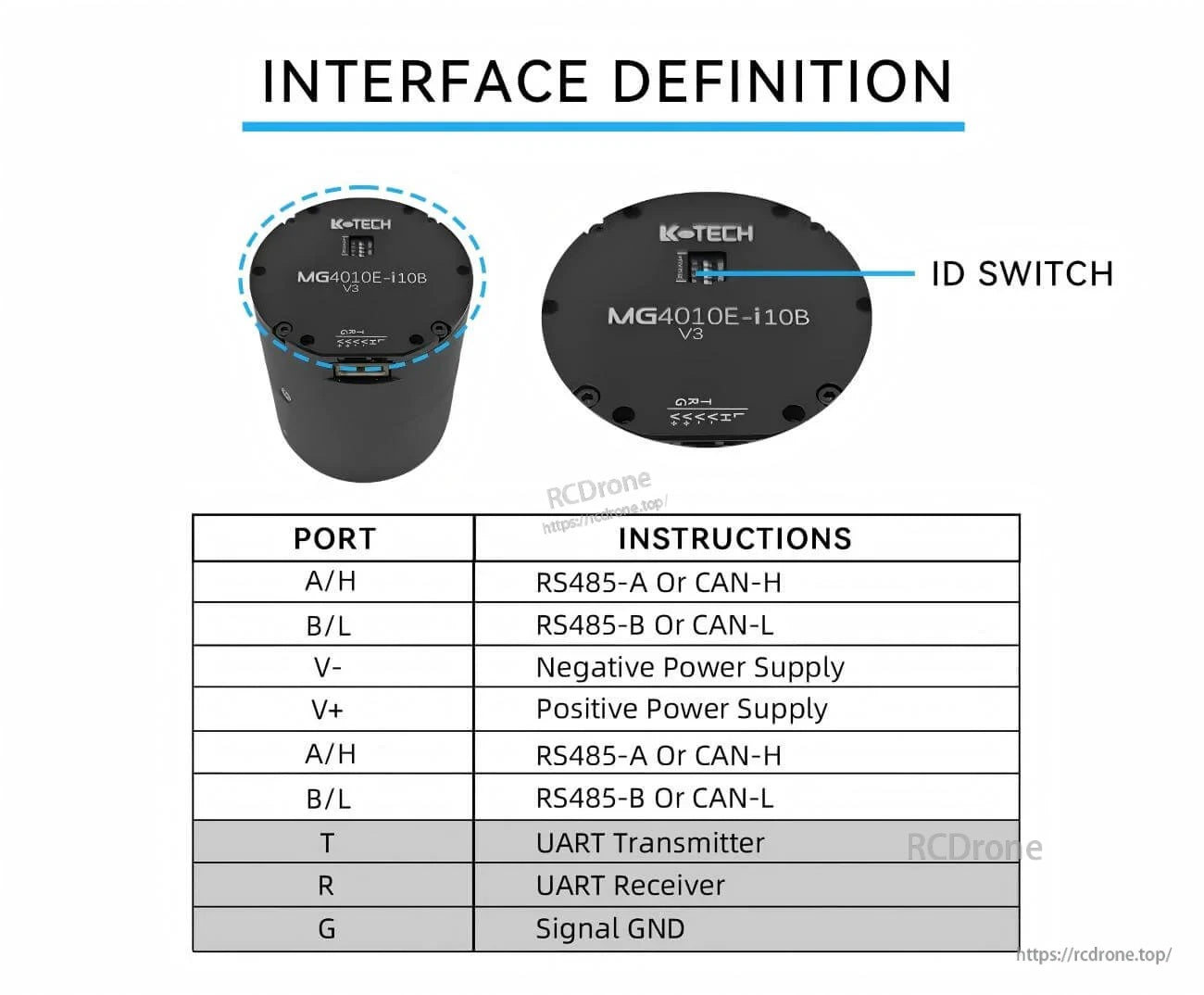
Portkartläggning inkluderar RS485-A/CAN-H och RS485-B/CAN-L, plus ström, UART TX/RX, signaljord och en inbyggd ID-brytare.

Related Collections




