




LKMTECH MG4010E-i36-V3 Planetväxelmotor 24V 1:36 RS485/CAN Magnetisk Encoder för Robotik
LKMTECH MG4010E-i36-V3 Planetväxelmotor 24V 1:36 RS485/CAN Magnetisk Encoder för Robotik
LKMTECH
Det gick inte att ladda hämtningstillgänglighet
Översikt
Den LKMTECH MG4010E-i36-V3 Motorn är en planetväxelmotor designad för robotik och rörelsekontrollaktuatorer. Den kombinerar en borstlös motor, planetväxel och magnetisk encoder, med kommunikationsalternativ listade som RS485 eller CAN.
Nyckelfunktioner
- Planetväxelmotor (MG4010E-i36, V3).
- Utväxlingsförhållande: 1:36 (även angivet som “Utväxlingsförhållande 1:36”).
- Växelspel: 7 arcmin (bildetikett) / 12 arcmin (specifikationstabell).
- Encoder: 18bit enkelvarv absolut magnetisk encoder (bildtext); även angivet som 18bit (motor) + 14bit (växel) magnetisk encoder (specifikationstabell).
- Kommunikation: RS485 eller CAN.
- Driv/FOC-drivrutin refererad (bildtext: “Högpresterande FOC-drivrutin”).
- Inbyggd broms (bildtext/UI-etikett).
- Värdparametrar/tester/firmwareuppgraderingar stöds (bildtext).
Specifikationer
| Artikelnamn | MG4010E-i36-V3 |
| Nominell spänning | 24V |
| Max hastighet | 90RPM |
| Nominell hastighet | 77RPM |
| Nominell ström | 2.4A |
| Max effekt | 132W |
| Nominellt vridmoment | 6 N.m (spec tabell) / 9 N.m (bildetikett) |
| Max vridmoment | 13 N.m (spec tabell) / 18 N.m (bildetikett) |
| Hastighetskonstant | 3 rpm/V |
| Vridmoment konstant | 2.58 N.m/A |
| Varv | 14 |
| Vindningstyp | Y |
| Fasmotstånd | 0.68 Ω |
| Fasinduktans | 0.25 mH |
| Motorpoler | 28 |
| Rotormoment | 158 gcm² |
| Motortemperatur | JA |
| Reducerart | PG5336 |
| Reduceringsförhållande | 1:36 |
| Backlash | ≤12 arcmin (spec tabell) / 6 arcmin (bildetikett) |
| Lagrets nominella belastning | 1120 N |
| Motors vikt | 378 g |
| Rekommenderad drivning | DG40E |
| Drivningens ingångsspänning | 12-24V (spec tabell) / 12-60V (bildetikett) |
| Kommunikation | RS485 ELLER CAN |
| Kommunikationsfrekvens | RS485: 500 Hz (115200 bps) / CAN: 2 KHz (1 Mbps) |
| Encoder | 18bit (motor) + 14bit (reducer) Magnetisk Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2 Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M |
| Kontrollläge | Momentloop (24 KHz) / Hastloop (8 KHz) / Positionsloop (4 KHz) |
| Accelerationskurva | Trapezoidal acceleration |
| Motorstorlek | Φ 53*54.5 (bildetikett) |
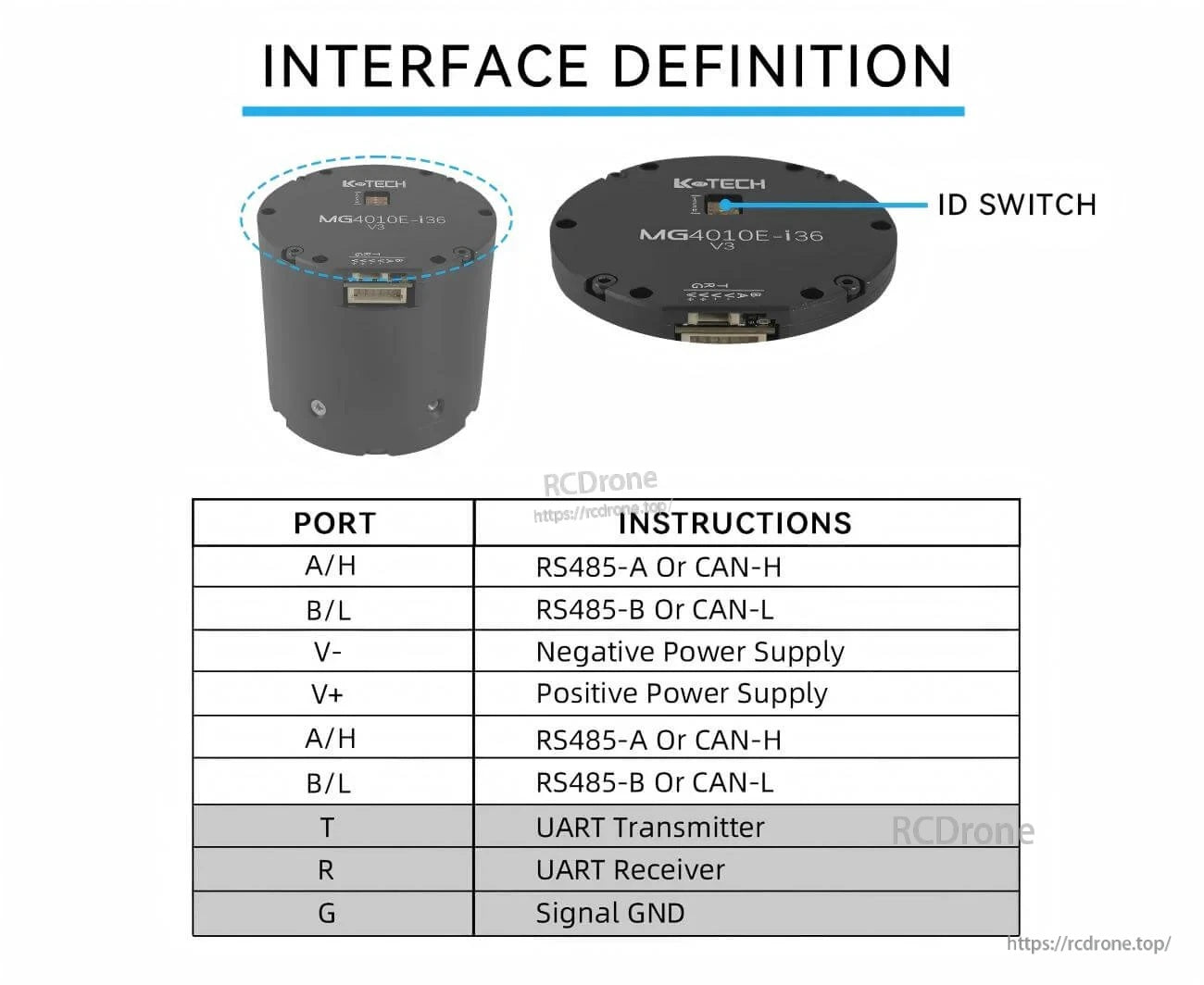
Gränssnittsdefinition
- ID-brytare (bildetikett: “ID-BRYTARE”).
| Port | Instruktioner |
|---|---|
| A/H | RS485-A eller CAN-H |
| B/L | RS485-B eller CAN-L |
| V- | Negativ strömförsörjning |
| V+ | Positiv strömförsörjning |
| T | UART Sändare |
| R | UART Mottagare |
| G | Signal GND |
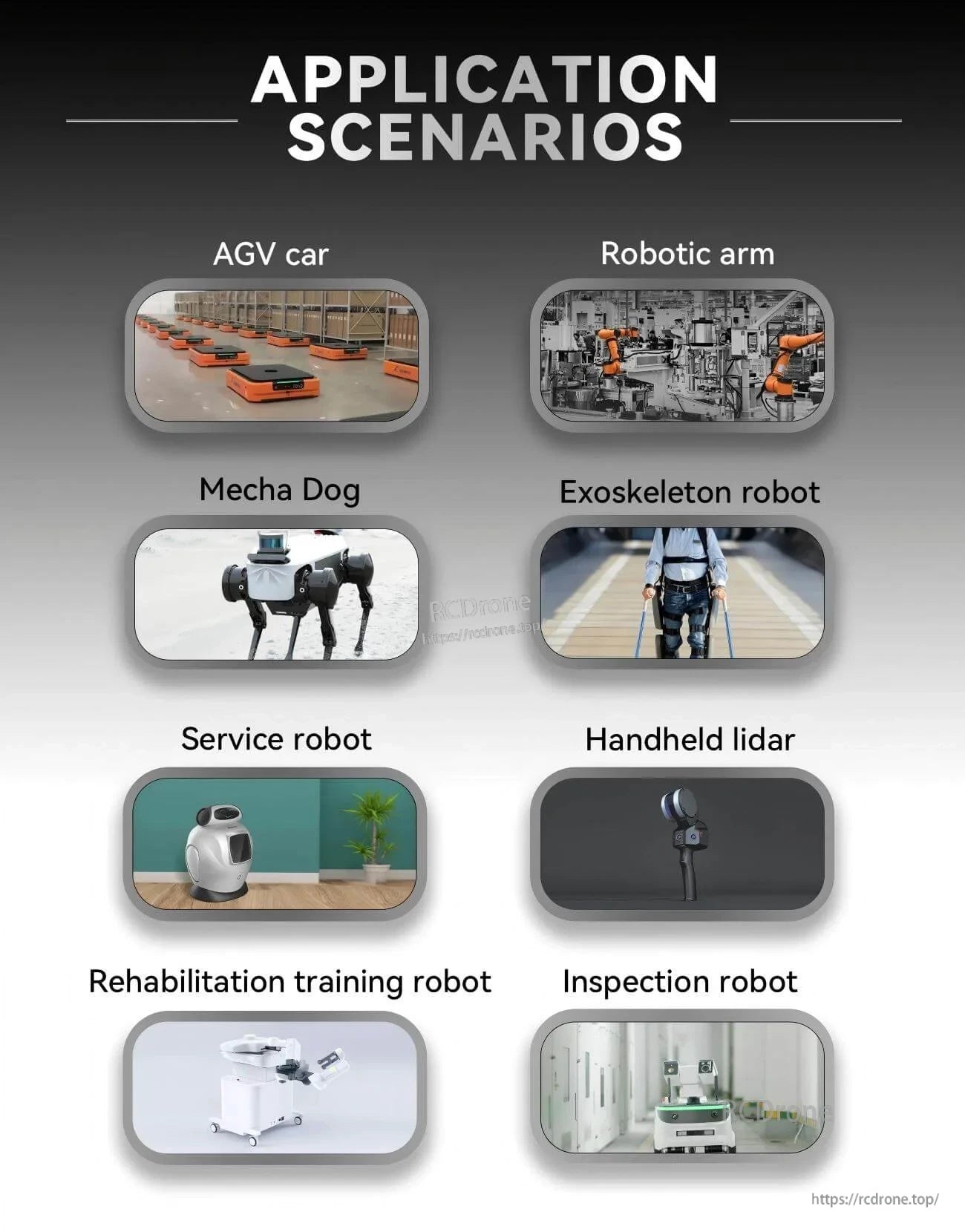
Tillämpningsscenarier
- Humanoida robotar
- Robotarmar
- Exoskelett
- Kvadruped robotar
- AGV-fordon / AGV-bil
- ARU-robotar
- Mecha Hund
- Tjänsterobot
- Handhållen lidar
- Rehabiliteringsträningsrobot
- Inspektionsrobot
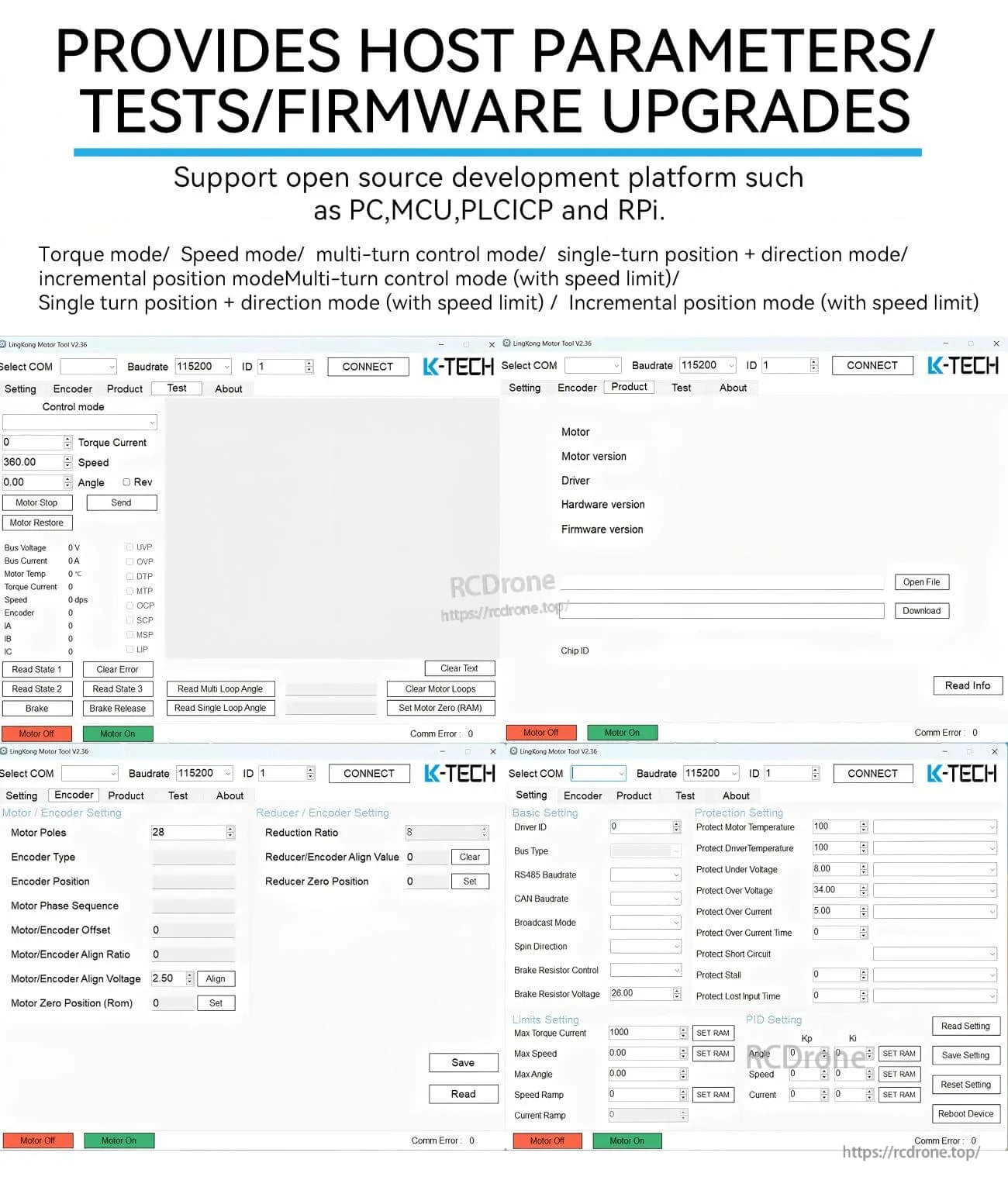
Kontroll & Programvarunoteringar
- Stöder öppna utvecklingsplattformar som PC, MCU, PLC, ICP och RPi.
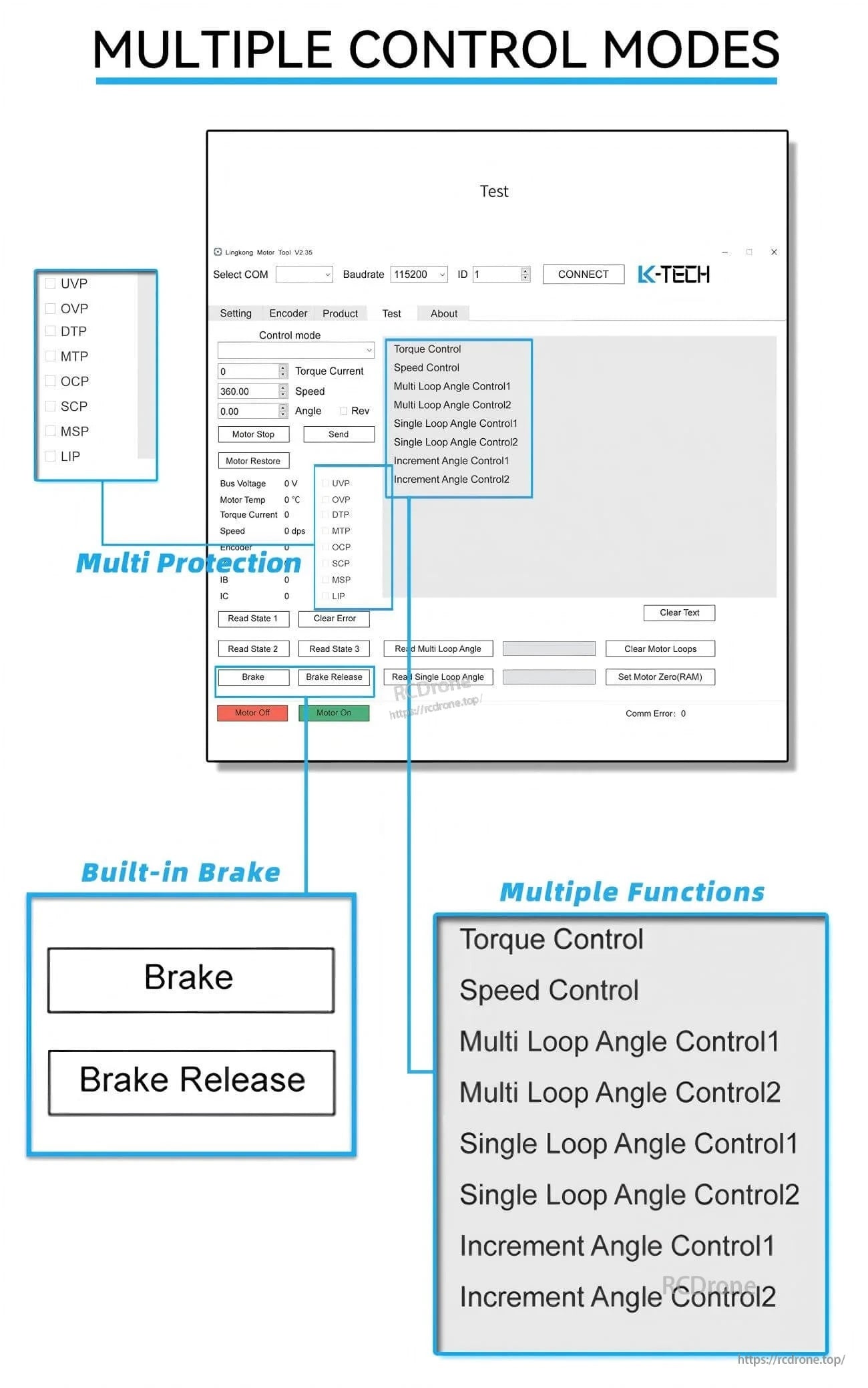
- Listade lägen (bildtext): Momentläge, hastighetsläge, flervarvskontrolläge, envarvsläge + riktning, inkrementellt positionsläge; versioner med hastighetsbegränsning visas också.
- Flera kontrolllägen visas i användargränssnittet: Momentkontroll, Hastighetskontroll, Flerloopvinkelkontroll1, Flerloopvinkelkontroll2, Enloopvinkelkontroll1, Enloopvinkelkontroll2, Inkrementvinkelkontroll1, Inkrementvinkelkontroll2.
- Flera skyddsetiketter visas: UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP.
- Inbyggda bromskontroller visas: Broms, Bromsfrikoppling.
För förhandsförsäljningskompatibilitetskontroller (RS485/CAN-integration, val av baudrate) eller hjälp med filåtkomst, kontakta [email protected] or besök https://rcdrone.top/.
Manualer / Dokument
Detaljer

MG4010E-i36-V3 kombinerar en borstlös motor, planetväxel och magnetisk encoder för kompakta robotaktuatorer.
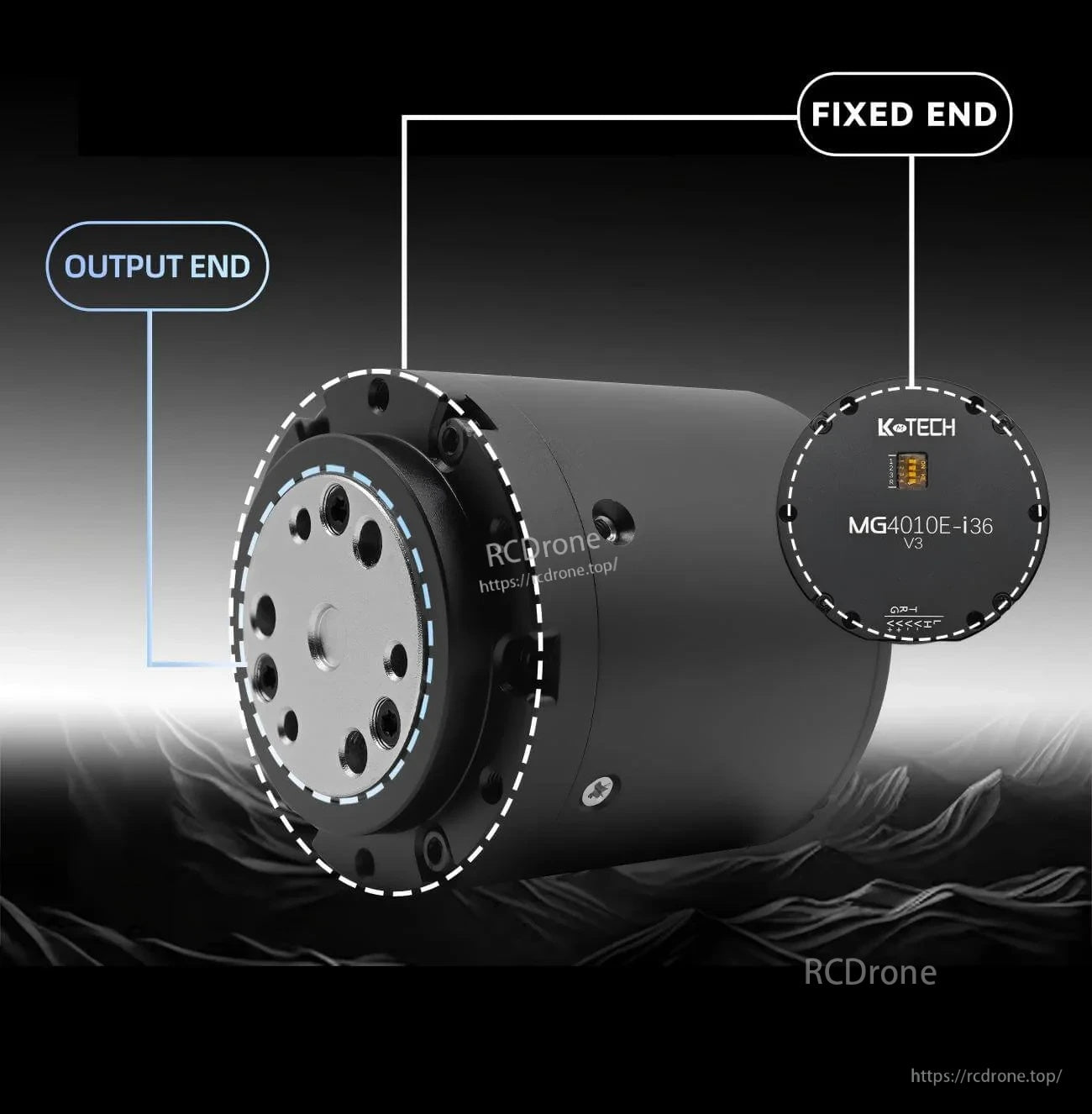
En fläns-stil utgångsände och fast ände layout gör integrationen enklare i armar, ben och andra ledmoduler.

RS485 eller CAN kommunikation paras med en FOC-drivrutin och absolut magnetisk encoder återkoppling för stabilt vridmoment, hastighet och positionskontroll.
Vanliga användningsområden inkluderar AGVs, robotarmar, fyrbenta plattformar, exoskelett och inspektions- eller servicero botar.
Kablarna är förenklade med märkta RS485/CAN-bussstift, strömanslutningar, UART Tx/Rx, signaljord och en inbyggd ID-brytare.
Inbyggd bromskontroll och flera driftslägen hjälper till att anpassa beteendet för olika rörelsekontrolluppgifter och säkerhetskrav.
Related Collections




