




LKMTECH MG4010E-i36B-V3 Motor 24V 1:36 Planetväxelmotor med broms, RS485/CAN, Magnetisk Encoder
LKMTECH MG4010E-i36B-V3 Motor 24V 1:36 Planetväxelmotor med broms, RS485/CAN, Magnetisk Encoder
LKMTECH
Det gick inte att ladda hämtningstillgänglighet
Översikt
LKMTECH MG4010E-i36B-V3 Motor är en planetväxelmotor med integrerad broms och encoderåterkoppling, designad för robotikaktivering där precis vridmoment/hastighet/positionskontroll och kompakt integration krävs. Den stöder RS485 eller CAN-kommunikation och specificeras med en PG4210 reducer (1:36) och dubbel magnetisk encoder (18-bit motor + 14-bit reducer).
Nyckelfunktioner
- Planetväxel: PG4210, utväxlingsförhållande 1:36, backlash ≤12 arcmin
- Encoder: 18-bit (motor) + 14-bit (reducer) magnetisk encoder
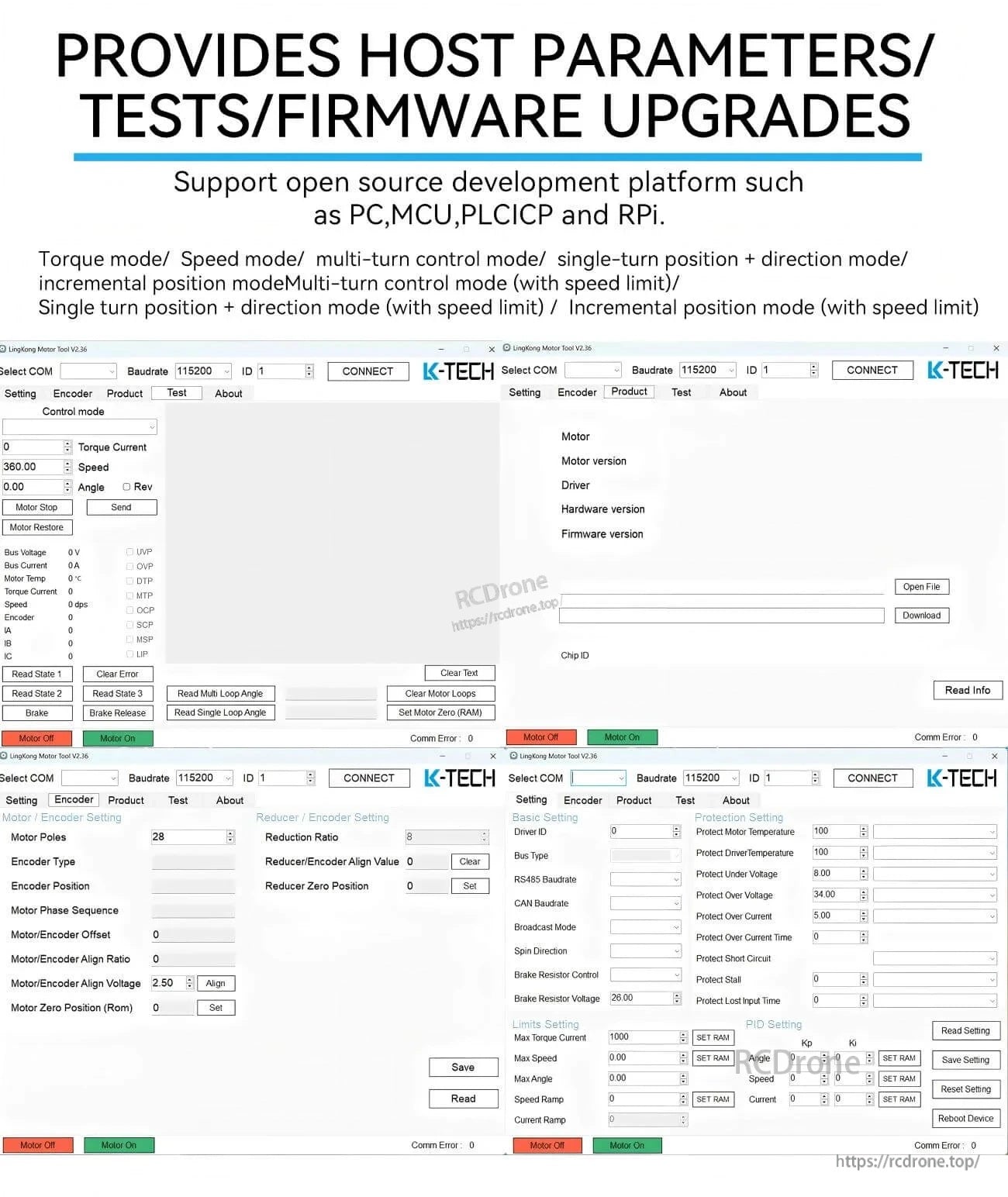
- Kommunikation: RS485 eller CAN
- Kontrollslussar: Vridmomentloop (32KHz) / Hastighetsloop (8KHz) / Positionsloop (4KHz)
- Accelerationskurva: Trapezoidal acceleration
- Broms: BG4906, broms vridmoment 0.6N.m
- Motortemperatur: JA
Tekniska specifikationer
| Artikelnamn | MG4010E-i36B-V3 |
| Nominell spänning | 24V |
| Max hastighet | 90RPM |
| Nominell hastighet | 77RPM |
| Nominellt vridmoment | 6N.m |
| Max vridmoment | 13N.m |
| Nominell ström | 2.4A |
| Max effekt | 132W |
| Hastighetskonstant | 3rpm/V |
| Vridmomentkonstant | 2.58N.m/A |
| Varv | 14 |
| Vindningstyp | Y |
| Fasmotstånd | 0.68Ω |
| Fasinduktans | 0.25mH |
| Motorpoler | 28 |
| Rotormoment | 158gcm² |
| Motortemperatur | JA |
| Reducerart | PG4210 |
| Reduceringsförhållande | 1:36 |
| Backlash | ≤12 arcmin |
| Lagerbelastning | 1120N |
| Motorvikt | 542.5g |
| Bromstyp | BG4906 |
| Brommoment (N.m) | 0.6N.m |
| Startspänning (V) | 24V |
| Upprätthållande spänning (V) | 7V |
| Upprätthållande effekt (W) | 1.4W |
| Rekommenderad drivning | DG40E |
| Drivningens ingångsspänning | 7.4-32V |
| Kommunikation | RS485 ELLER CAN |
| Kommunikationsfrekvens | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18bit(motor)+14bit(reducer) Magnetisk Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M |
| Kontrollläge | Momentloop (32KHz)/Hastighetsloop (8KHz)/Positionsloop (4KHz) |
| Accelerationskurva | Trapezoidal acceleration |
Gränssnittdefinition (Portar)
Portbeteckningar som visas för denna motorserie:
- A/H: RS485-A eller CAN-H
- B/L: RS485-B eller CAN-L
- V-: Negativ strömförsörjning
- V+: Positiv strömförsörjning
- T: UART Sändare
- R: UART Mottagare
- G: Signalgnd
- ID-brytare
Tillämpningar
- Humanoida robotar
- Robotarmar
- Exoskelett
- Fyra-benta robotar
- AGV-fordon
- ARU-robotar
Manualer / Dokument
För integrationssupport och förhandskompatibilitetskontroller, kontakta [email protected] or besök https://rcdrone.top/.
Detaljer

Kompakt planetväxelmotorkropp integrerar bromsen och den inbyggda gränssnittet i ett enda aktuator paket.
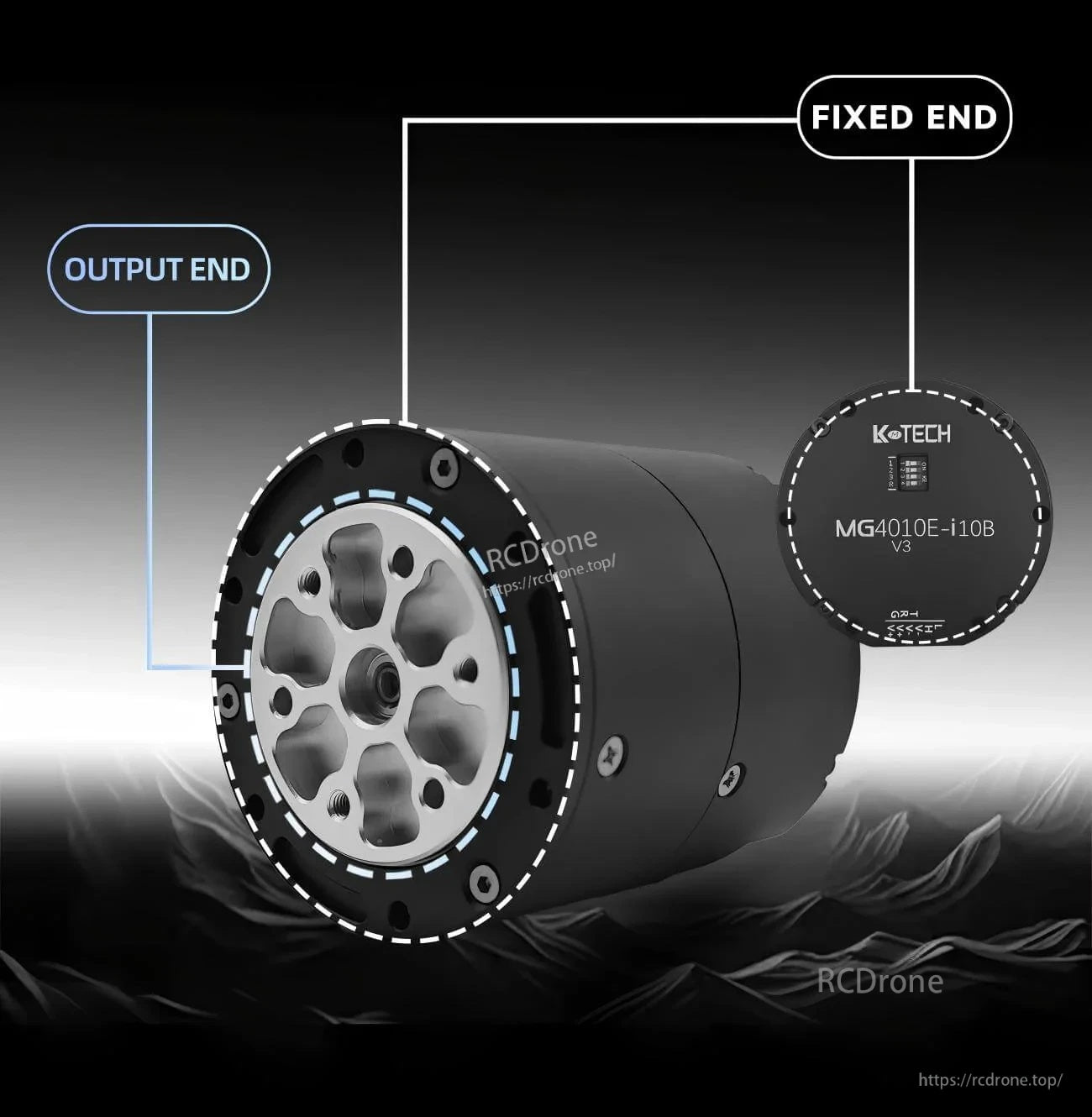
En tydligt definierad utgångsände och fast ände hjälper till att förenkla mekanisk integration och justering i monteringar.

Encoderåterkoppling och busskommunikation stödjer stabilt vridmoment, hastighet och positionskontroll för robotled.
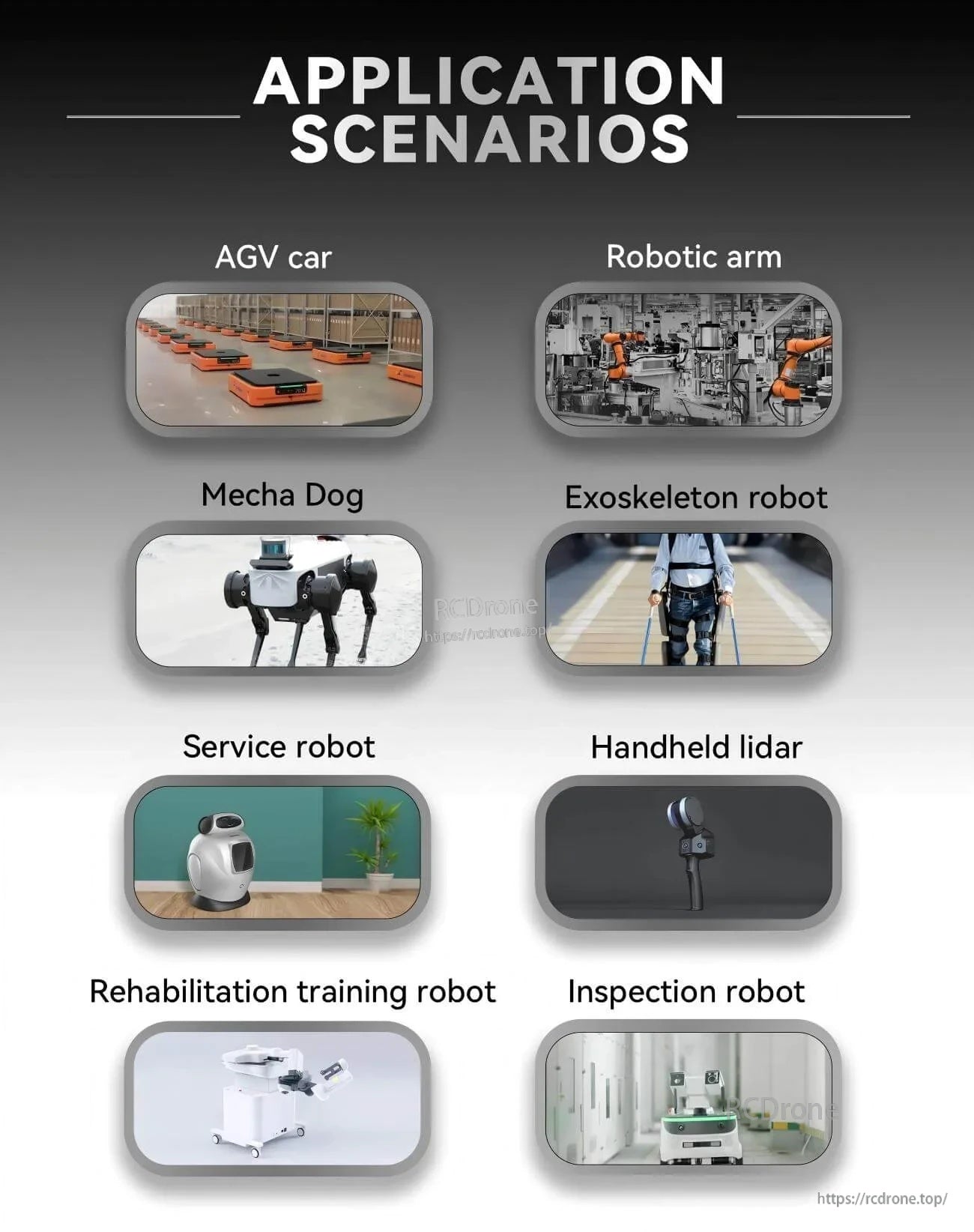
Designad för robotaktiveringsuppgifter från AGVs och robotarmar till benrobotar och exoskelettsystem.
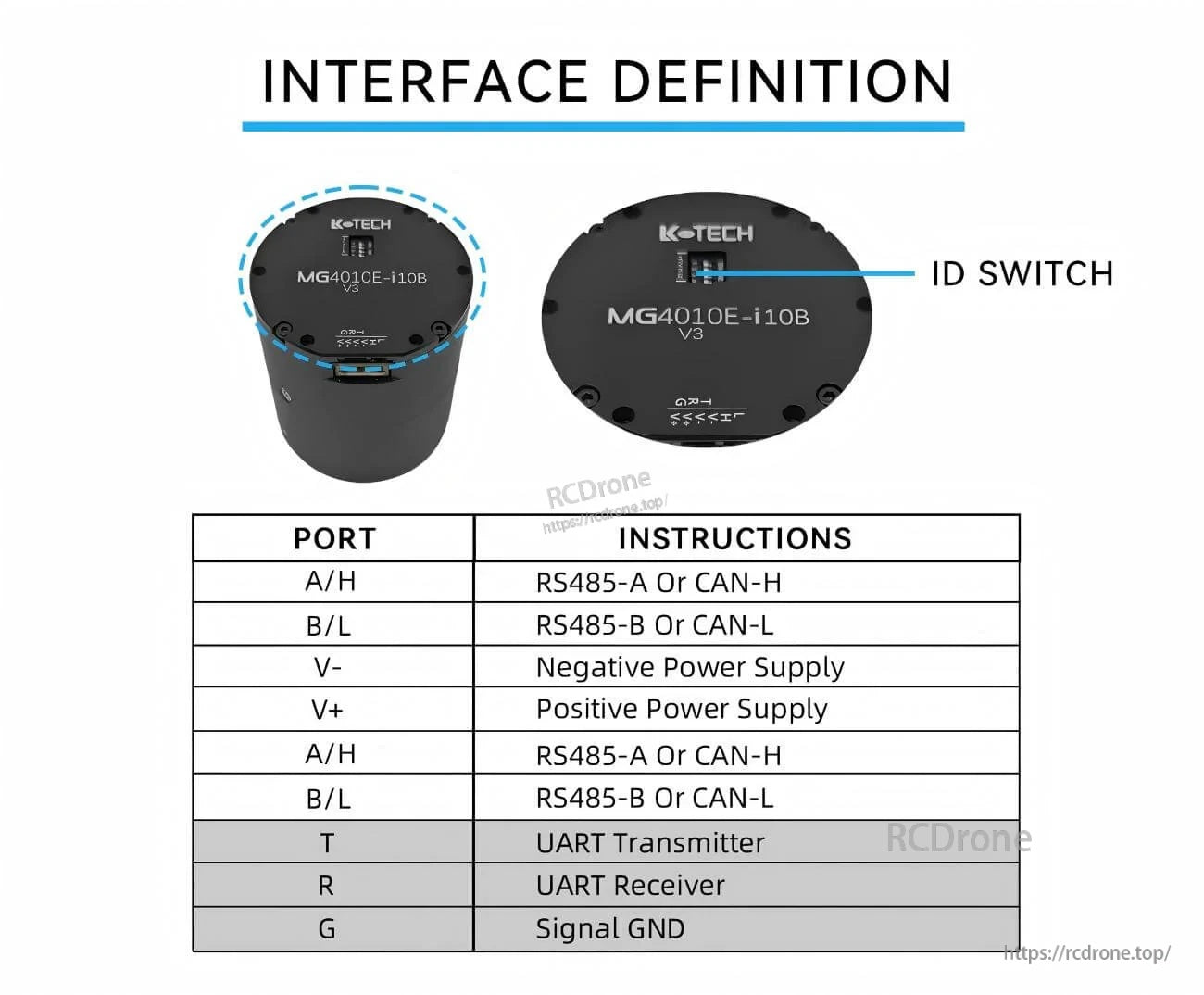
Portdefinitioner täcker ström, RS485/CAN-kablar och UART-stift, med en inbyggd ID-brytare för adressering.

Related Collections




