




LKMTECH MG6012-i36-V3 Motor 24V/48V 25N.m 1:36 Planetväxel, RS485/CAN, 18-bitars Encoder
LKMTECH MG6012-i36-V3 Motor 24V/48V 25N.m 1:36 Planetväxel, RS485/CAN, 18-bitars Encoder
LKMTECH
Det gick inte att ladda hämtningstillgänglighet
Översikt
LKMTECH MG6012-i36-V3 Motor är en högpresterande borstlös motormodul med en planetväxel och stöd för encoder/drivkommunikation för robotikrörelsesystem. Produktpositioneringstexten inkluderar: “Högsta standard för produktdesign”, “Hög utgångseffekt”, “Stort utgångsmoment” och “Hög precision”.
Applikationsscenarier
- Humanoida robotar
- Robotarmar
- Exoskelett
- Kvadrupedrobotar
- AGV-fordon / AGV-bil
- ARU-robotar
- Robothund
- Bärbar robot
Nyckelfunktioner
- Högpresterande borstlös motor
- Högprecisions planetväxel
- Högpresterande FOC-drivrutin (textreferens)
- Drivspänning: 12-60V
- Kommunikation: CAN eller RS485
- Huvudkontroll: 170M huvudfrekvens med 32-bit ARM (textreferens)
- Encoder: 18bit enkelring absolut encoder / 18bit magnetisk encoder (båda angivna)
- “En kalibrering, nollposition förloras aldrig, behöver inte hitta nollpunkt vid strömavbrott.” (angivet)
- ID-brytare (angivet)
- Dubbla temperatursensorgränssnitt; realtidsövervakning av motor- och drifttemperatur (angivet)
Specifikationer
| Parameter | 24V-version | 48V-version |
|---|---|---|
| Artikelnamn | MG6012-i36-V3 | MG6012-i36-V3 |
| Nominell spänning | 24V | 48V |
| Max hastighet | 45RPM | 88RPM |
| Nominellt vridmoment | 25N.m | 25N.m |
| Nominell hastighet | 45RPM | 74RPM |
| Nominell ström | 4A | 4.8A |
| Max effekt | 140W | 500W |
| Max vridmoment | 40N.m | 40N.m |
| Hastighetskonstant | 67rpm/V | 67rpm/V |
| Momentkonstant | 0.175N.m/A | 0.146N.m/A |
| Varv | 15 | 15 |
| Vindningstyp | Y | Y |
| Fasmotstånd | 0.63Ω | 0.63Ω |
| Fasinduktans | 0.28mH | 0.28mH |
| Motorpoler | 28 | 28 |
| Rotormoment | 930 | 908 |
| Motortemperatur | JA | JA |
| Reducer Typ | PG4136 | PG4136 |
| Reduceringsförhållande | 1:36 | 1:36 |
| Backlash | ≤12 arcmin | ≤12 arcmin |
| Lagerbelastning | 1770N | 1770N |
| Motorvikt | 503g | 503g |
| Rekommenderad drivning | DG60 | DG60 |
| Drivningens ingångsspänning | 12-60V | 12-60V |
| Kommunikation | RS485 ELLER CAN | RS485 ELLER CAN | Kommunikationsfrekvens | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18-bit magnetisk encoder | 18-bit magnetisk encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M | 100K, 125K, 250K, 500K, 1M |
| Kontrollläge | Momentloop (32KHz)/Hastighetsloop (8KHz)/Positionsloop (4KHz) | Momentloop (32KHz)/Hastighetsloop (8KHz)/Positionsloop (4KHz) |
| Accelerationskurva | Trapezoidal acceleration | Trapezoidal acceleration |
Gränssnittsdefinition
CAN/RS485 och ID-brytare tillhandahålls (anges). Interface anteckningar:
| Gränssnitt | Notera |
|---|---|
| A/H | RS485-A eller CAN-H |
| B/L | RS485-B eller CAN-L |
| V- | Negativ strömförsörjning |
| V+ | Positiv strömförsörjning |
| T | UART-sändare |
| R | UART-mottagare |
| G | Signal GND |
Manualer / Dokument
För integrationsfrågor (CAN/RS485-installation, baudrateval eller kontrollerparning), kontakta [email protected] or besök https://rcdrone.top/.
Detaljer

MG6012-i36-V3 integrerar en borstlös motor, planetväxel och enkodarkommunikation för robotled.
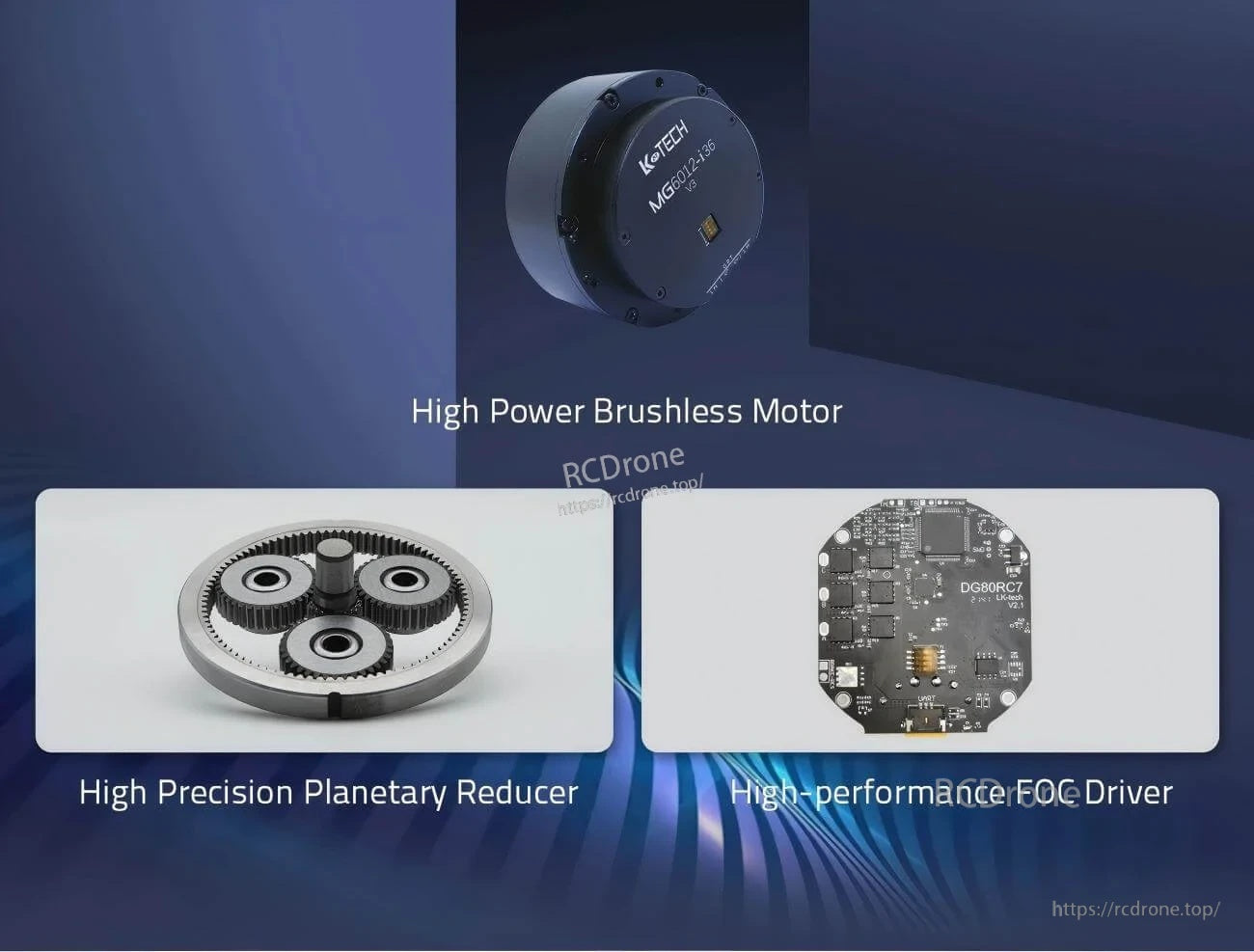
En kompakt drivsystem byggt runt en högpresterande motor, precisionsplanetväxling och en FOC-drivrutin.
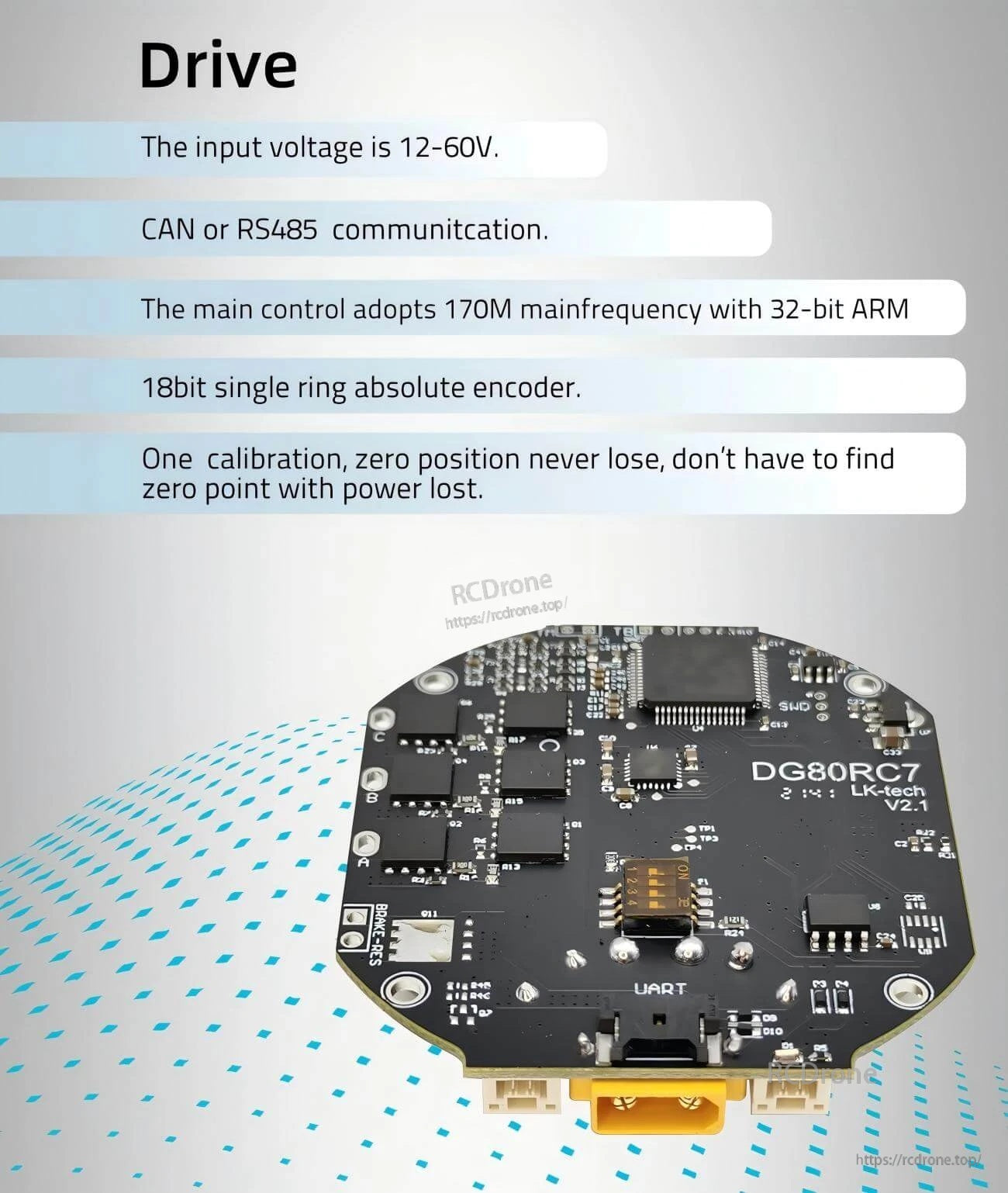
Kontroller elektroniken stödjer 12–60V ingång med CAN eller RS485 kommunikation plus ett 18-bitars absolut enkoderval.
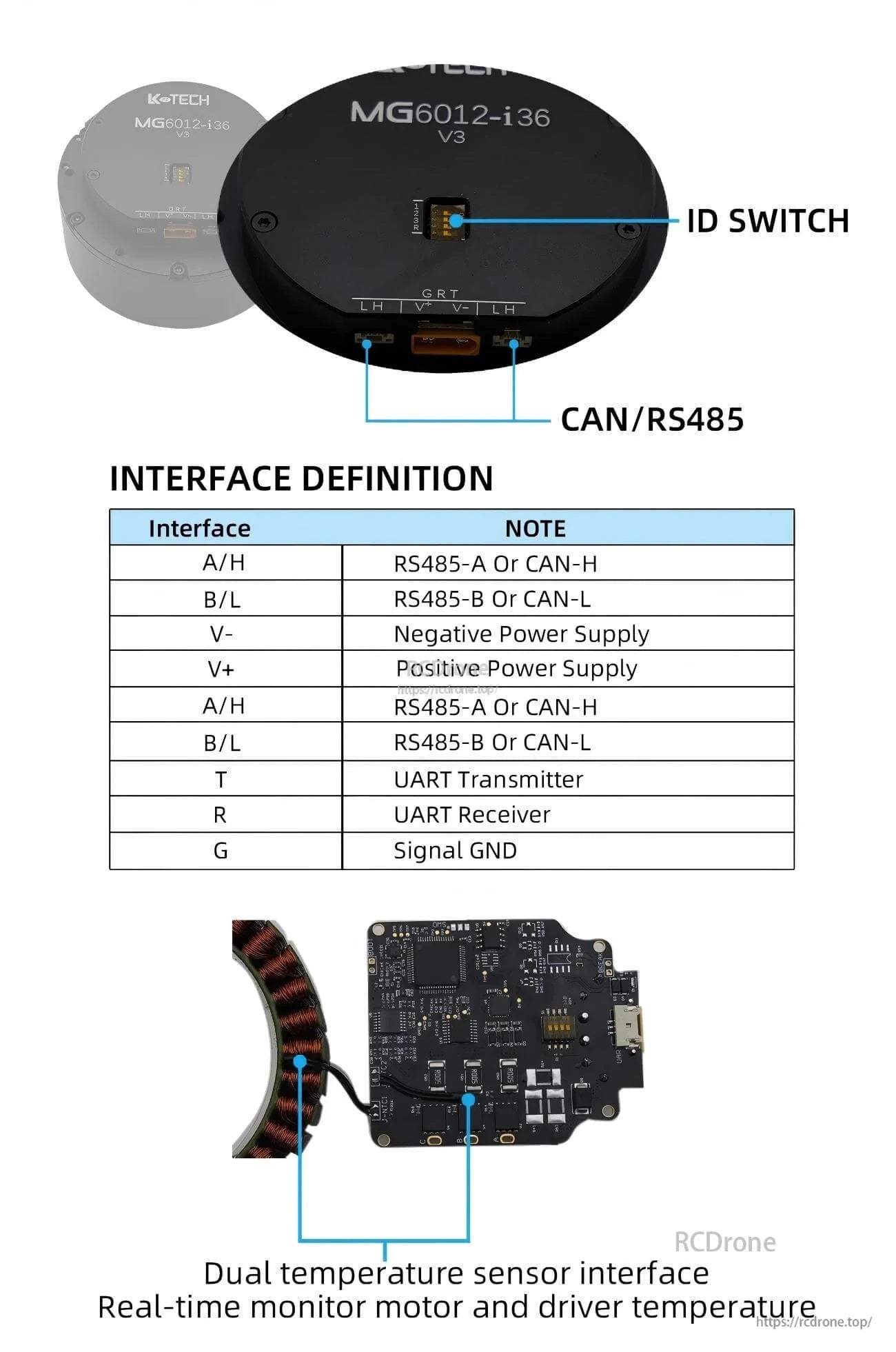
Tydliga pin-definitioner och en inbyggd ID-brytare hjälper till att förenkla kablage och multi-nod CAN/RS485-installationer.

1:36 planetväxeln är designad för låg backlash och hög vridmomentutgång i precisionsrörelsemonteringar.
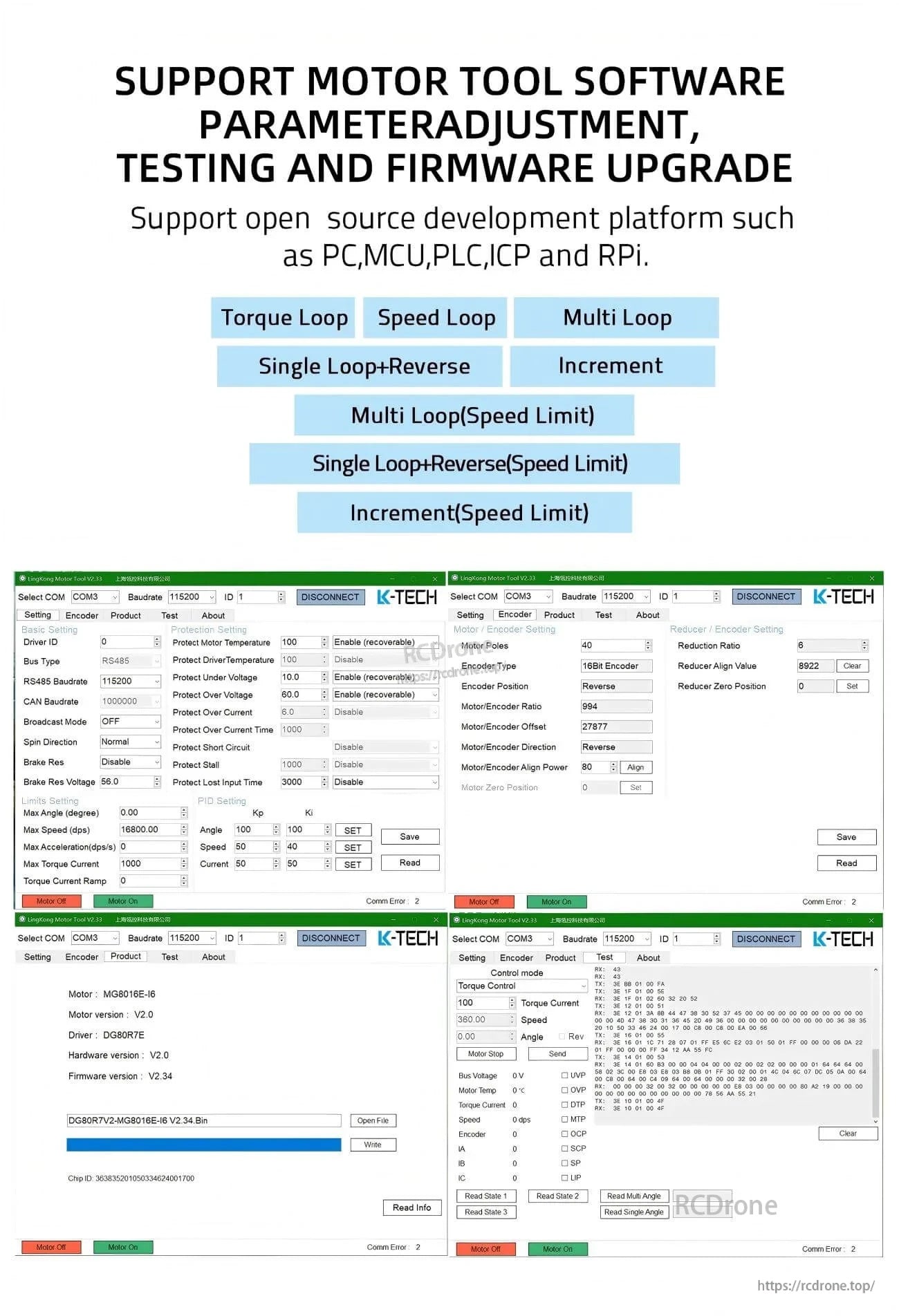
Konfigurationsprogramvara stödjer parameterjustering, loop-lägetestning och firmwareuppgraderingar över vanliga utvecklingsplattformar.
Lämplig för robotikapplikationer såsom AGVs, robotarmar, fyrbenta och bärbara/exoskelettmekanismer.
Related Collections




