




LKMTECH MG6012E-i8-V2 Motor 48V 6N.m Märkt 16N.m Max, 1:8 Planetväxel, RS485/CAN Encoder
LKMTECH MG6012E-i8-V2 Motor 48V 6N.m Märkt 16N.m Max, 1:8 Planetväxel, RS485/CAN Encoder
LKMTECH
Ordinarie pris
$411.00 USD
Ordinarie pris
Försäljningspris
$411.00 USD
Enhetspris
per
Skatter ingår.
Frakt beräknas i kassan.
Det gick inte att ladda hämtningstillgänglighet
Översikt
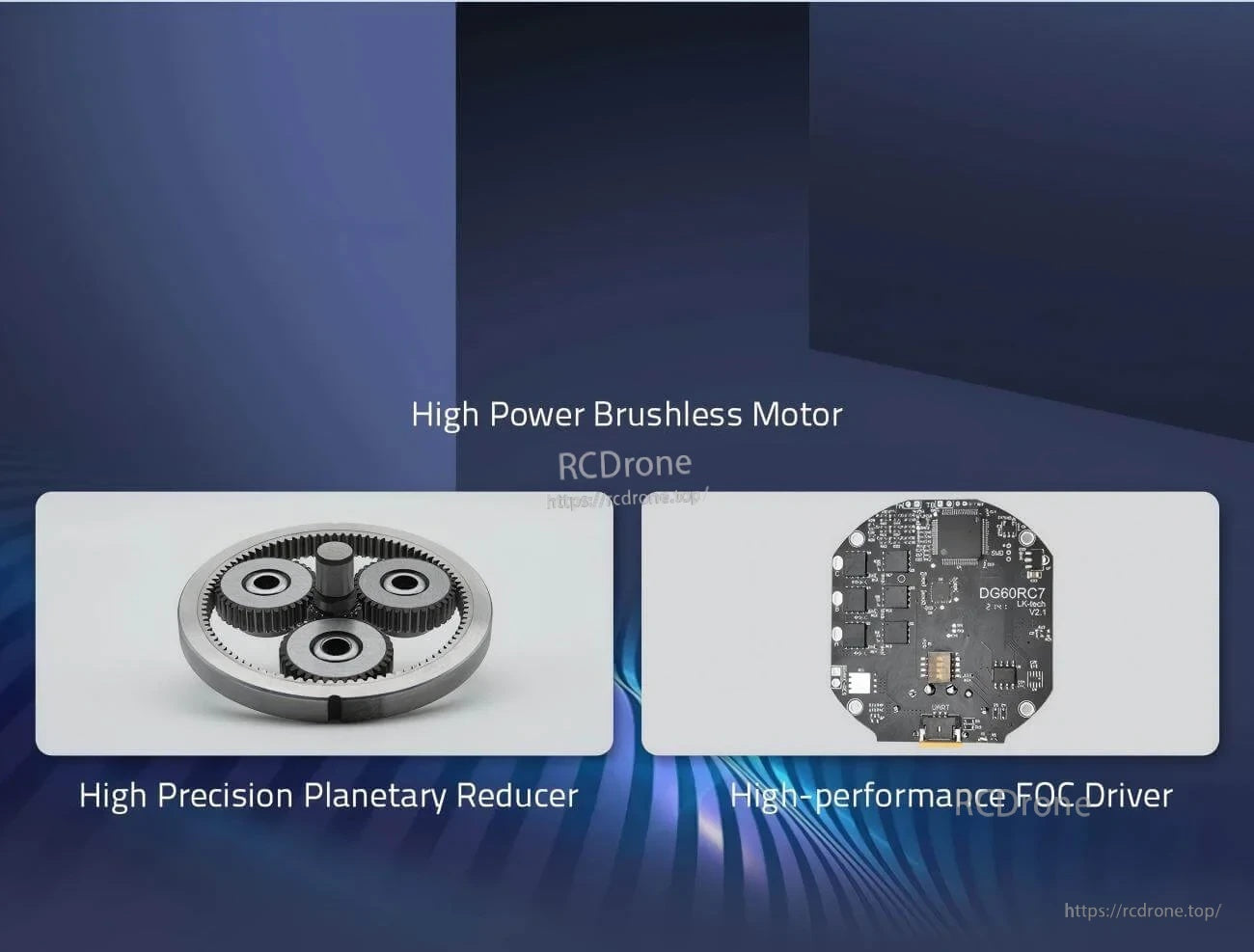
LKMTECH MG6012E-i8-V2 Motor är en högpresterande borstlös motor med en högprecisions planetväxel (förhållande 1:8) och integrerade magnetiska encoders för rörelsekontrollapplikationer. Den är designad för hög effekt, stort utgångsmoment och hög precision.
Nyckelfunktioner
- Hög uteffekt / stort utgående vridmoment / hög precision
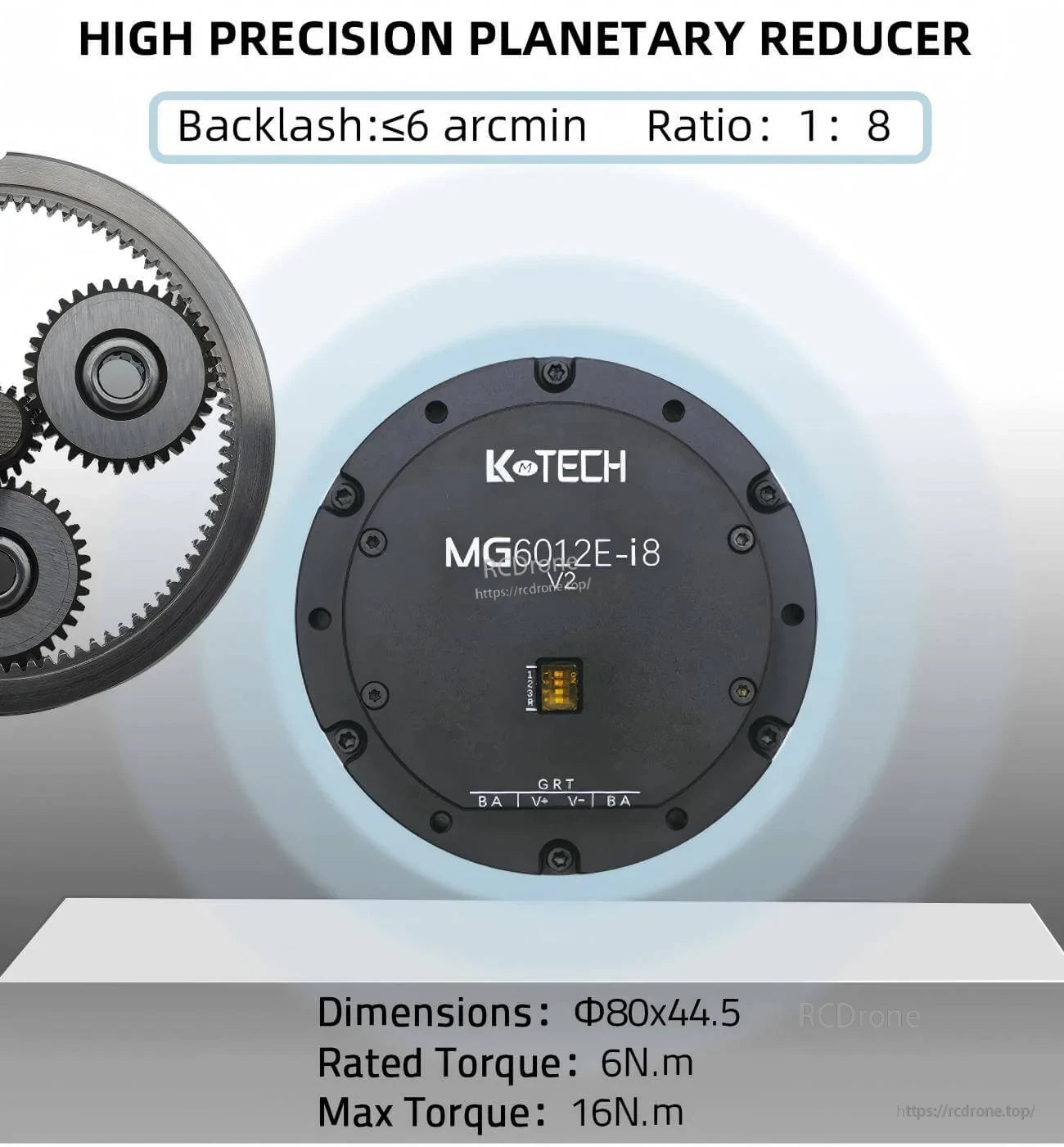
- Högprecisions planetväxel: backlash ≤6 arcmin, förhållande 1:8
- Encoder: 18-bit (motor) + 14-bit (växel) magnetisk encoder
- Kommunikationsalternativ: RS485 eller CAN
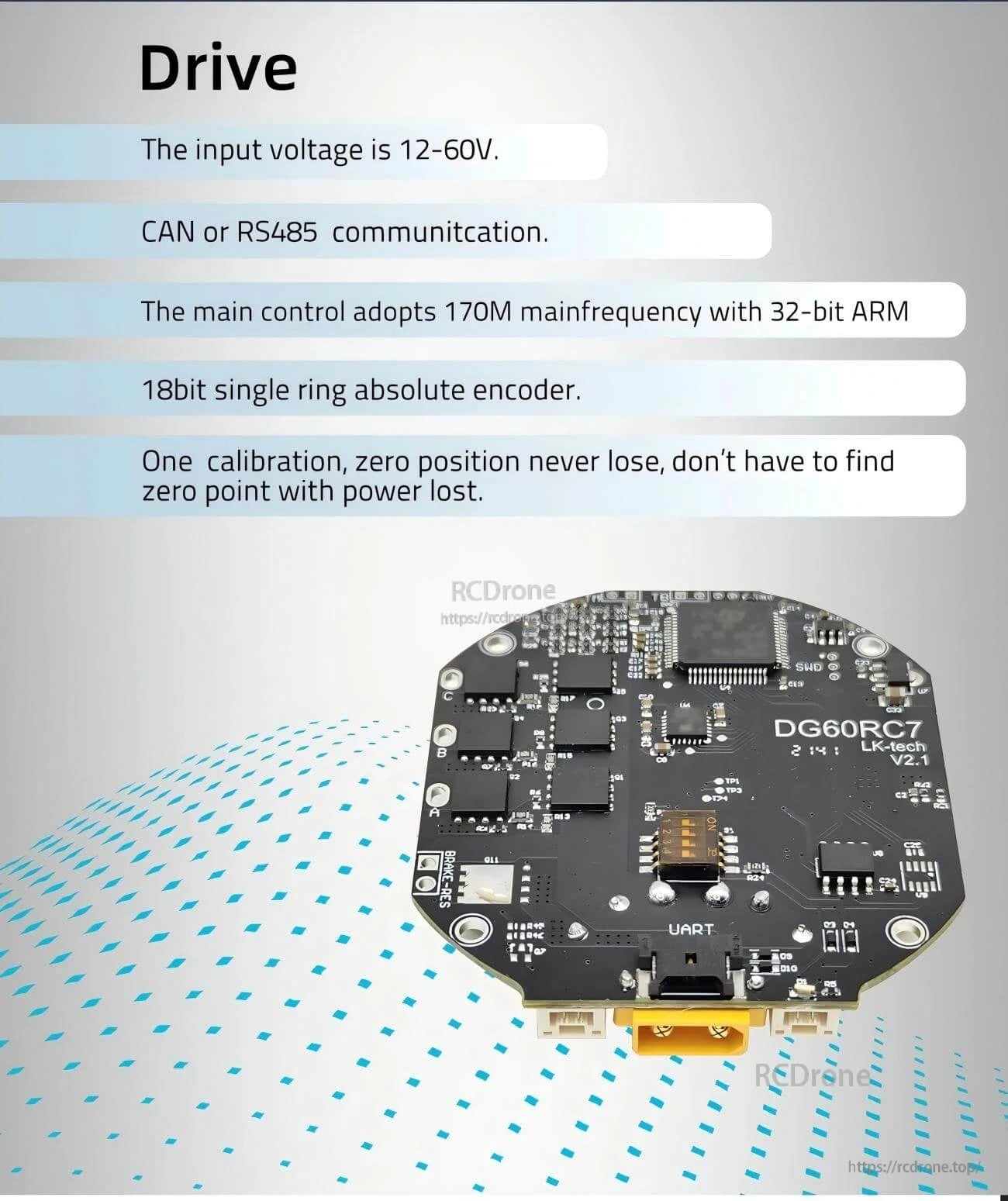
- Drivspänning: 12-60V (rekommenderad drivning: DG60Ev2)
- 18-bit enkelring absolut encoder; en kalibrering, nollposition försvinner aldrig; ingen behov av att hitta noll efter strömavbrott
- Huvudkontrollen använder 170M huvudfrekvens med 32-bit ARM (drivfunktionstext)
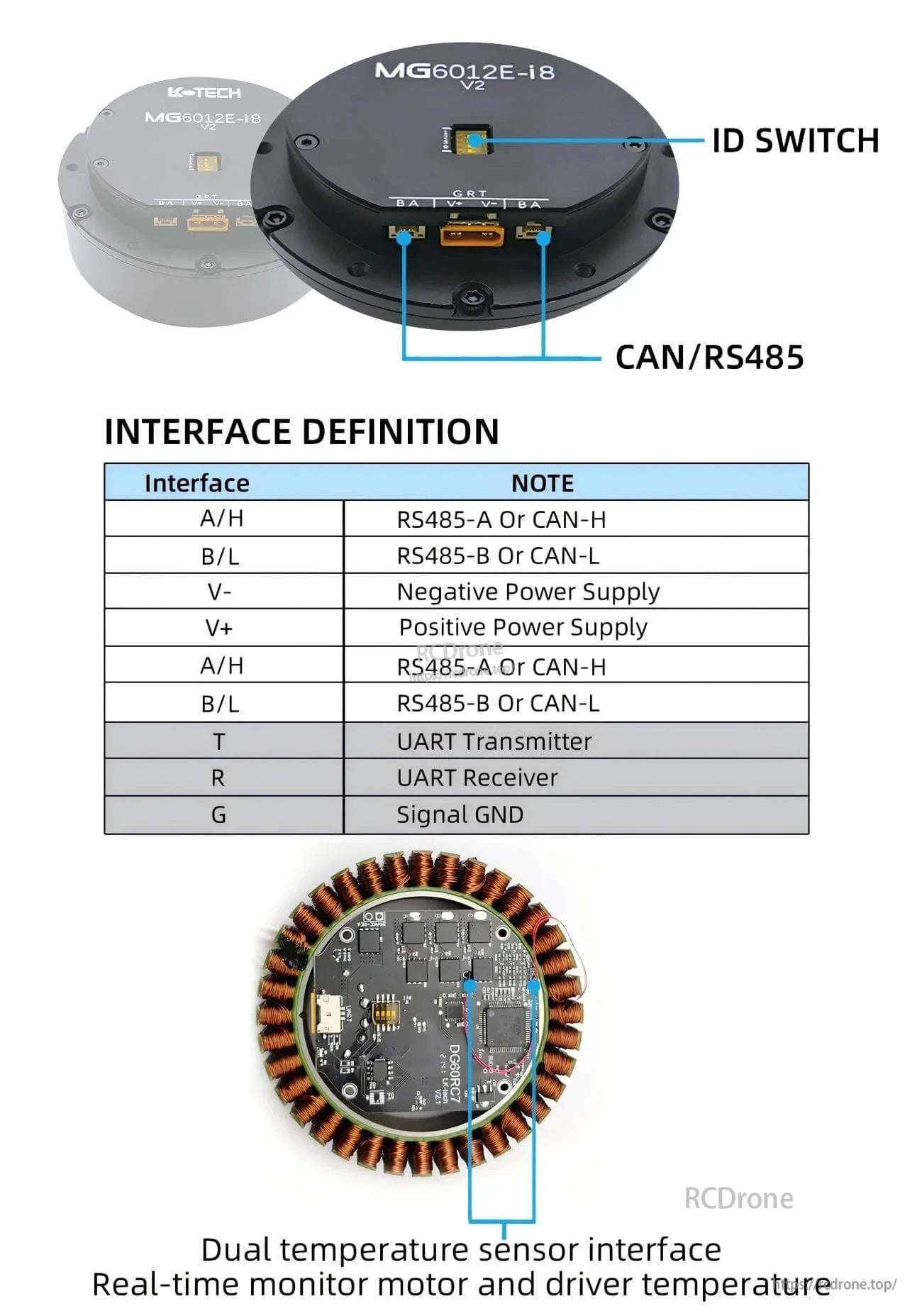
- ID-brytare; CAN/RS485-gränssnitt; UART-gränssnitt (T/R/G) tillgängligt enligt gränssnittsdefinition
- Dubbla temperatursensorgränssnitt; realtidsövervakning av motor- och drifttemperatur
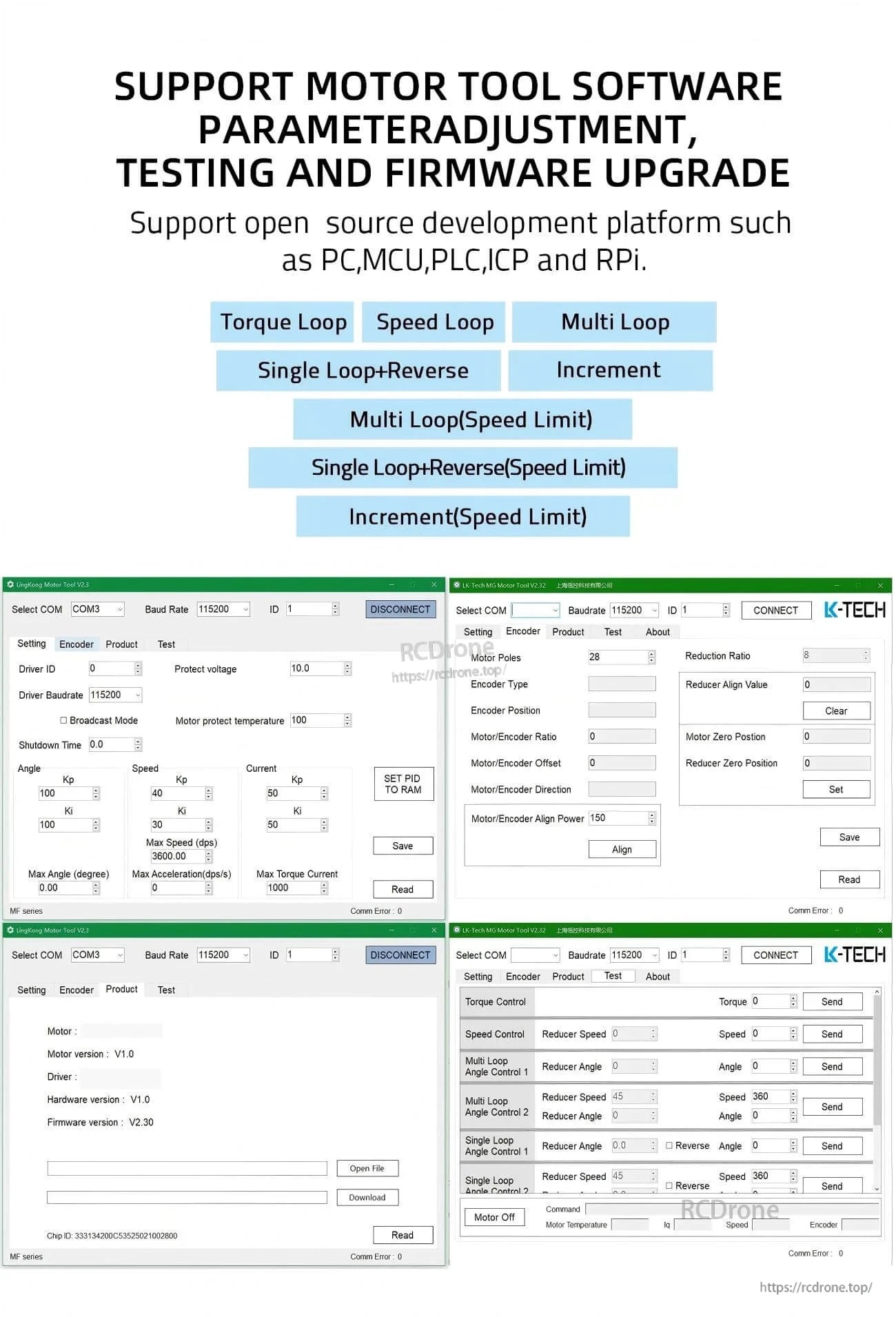
- Stöder motorverktygsprogramvara: parameterjustering, testning och firmwareuppgradering
- Stöder öppna utvecklingsplattformar som PC, MCU, PLC, ICP och RPi
Specifikationer
| Artikelnamn | MG6012E-i8-V2 |
| Nominell spänning | 48V |
| Max hastighet | 310RPM |
| Nominellt vridmoment | 6N.m |
| Max vridmoment | 16N.m |
| Nominal hastighet | 256RPM |
| Nominal ström | 3.5A |
| Max effekt | 294W |
| Hastighetskonstant | 42.7rpm/V |
| Vridmoment konstant | 1.09N.m/A |
| Varv | 20 |
| Vindningstyp | Y |
| Fasmotstånd | 1.3Ω |
| Fasinduktans | 0.55mH |
| Motorpoler | 28 |
| Rotormoment | 930gcm² |
| Motortemperatur | JA |
| Reducerart | PG4108 |
| Reduceringsförhållande | 1:8 |
| Backlash | ≤6 arcmin |
| Lagrets nominella belastning | 906N |
| Motorvikt | 430g |
| Mått | Φ80x44.5 |
| Rekommendera Drive | DG60Ev2 |
| Drivspänning | 12-60V |
| Kommunikation | RS485 ELLER CAN |
| Kommunikationsfrekvens | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18bit(motor)+14bit(reducer)Magnetisk Encoder |
| Encoder Baudrate(RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate(CAN) | 1M |
| Kontrollläge | Momentloop (32KHz)/Hastighetsloop (8KHz)/Positionsloop (4KHz) |
| Accelerationskurva | Trapezoidal acceleration |
Gränssnittsdefinition
| Gränssnitt | Notera |
|---|---|
| A/H | RS485-A eller CAN-H |
| B/L | RS485-B eller CAN-L |
| V- | Negativ strömförsörjning |
| V+ | Positiv strömförsörjning |
| T | UART-sändare |
| R | UART-mottagare |
| G | Signal GND |
Tillämpningar
- Humanoida robotar
- Robotarmar
- Exoskelett / bärbara robotar
- Kvadruped robotar / robot hund
- AGV-fordon / AGV-bil
- ARU-robotar
För integrationssupport och hjälp med produktval, kontakta [email protected] or besök https://rcdrone.top/ .
Manualer / Nedladdningar
Detaljer



Related Collections




