




LKMTECH MG6012E-i8B-V3 Motor 48V Planetväxel Motor 1:8 Broms RS485/CAN Magnetisk Encoder
LKMTECH MG6012E-i8B-V3 Motor 48V Planetväxel Motor 1:8 Broms RS485/CAN Magnetisk Encoder
LKMTECH
Det gick inte att ladda hämtningstillgänglighet
Översikt
LKMTECH MG6012E-i8B-V3-motorn är en tvåstegs planetväxelmotor med bromsar, utformad för robotik och automatiseringsaktuatorer som kräver kompakt storlek, hög vridmomentutgång och digital kommunikation.
Nyckelfunktioner
- Dubbelt planetväxelmotorn med broms
- Växelverkningsförhållande: 1:8
- Växelspel: arcmin (bildtext); 6 arcmin (specifikation)
- Motormått: 80*60
- 18-bit enkelvarv absolut magnetisk encoder (bildtext)
- Encoderkonfiguration: 18bit (motor) + 14bit (reducer) magnetisk encoder
- Kommunikation: RS485 eller CAN
- Rekommenderad drivrutin: DG60Ev2; drivrutins ingångsspänning: 12-60V
- Dubbla encoders, kom ihåg nollpunkt efter strömavbrott (bildtext)
- Stöd för öppna utvecklingsplattformar såsom PC, MCU, PLC, ICP och RPi (bildtext)
- Kontrollläge (specifikation): Momentloop (32KHz) / Hastighetsloop (8KHz) / Positionsloop (4KHz)
- Accelerationskurva: Trapezoidal acceleration
För valvägledning eller integrationssupport, kontakta [email protected] or besök https://rcdrone.top/ .
Specifikationer
| Artikelnamn | MG6012E-i8B-V3 |
| Nominell spänning | 48V |
| Max hastighet | 310RPM |
| Nominell hastighet | 256RPM |
| Nominellt vridmoment | 6N.m |
| Max vridmoment | 16N.m |
| Nominell ström | 3.5A |
| Max effekt | 294W |
| Hastighetskonstant | 42.7rpm/V |
| Vridmomentkonstant | 1.09N.m/A |
| Varv | 20 |
| Vindningstyp | Y |
| Fasmotstånd | 1.3 |
| Fasinduktans | 0.55mH |
| Motorpoler | 28 |
| Rotormoment | 930gcm2 |
| Motortemperatur | JA |
| Reducerart | PG4108 |
| Reduceringsförhållande | 1:8 |
| Backlash | 6 arcmin |
| Lagerbelastning | 1800N |
| Motorvikt | 718g |
| Bromstyp | MT15 |
| Bromsmoment | 1.5N.m |
| Startspänning | 24V |
| Startkraft | 17.5W |
| Upprätthållande spänning | 7V |
| Upprätthållande kraft | 1.5W |
| Rekommendera Drive | DG60Ev2 |
| Drivspänning | 12-60V |
| Kommunikation | RS485 ELLER CAN |
| Kommunikationsfrekvens | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18bit(motor)+14bit(reducer)Magnetisk Encoder |
| Encoder Baudrate (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate (CAN) | 100K, 125K, 250K, 500K, 1M |
| Kontrollläge | Momentloop (32KHz)/Hastighetsloop (8KHz)/Positionsloop (4KHz) |
| Accelerationskurva | Trapezoidal acceleration |
Gränssnittdefinition (Bildtext)
- ID-brytare
- Negativ strömförsörjning
- Positiv strömförsörjning
- CAN / RS485 (LH) (AB)
| Port | Instruktioner |
|---|---|
| A/H | RS485-A Eller CAN-H |
| B/L | RS485-B Eller CAN-L |
| V- | Negativ strömförsörjning |
| V+ | Positiv strömförsörjning |
| A/H | RS485-A Eller CAN-H |
| B/L | RS485-B Eller CAN-L |
| T | UART Sändare |
| R | UART Mottagare |
| G | Signal GND |
Applikationer
- Humanoida robotar
- Robotarmar
- Exoskelett
- Kvadruped robotar
- AGV-fordon / AGV-bil
- ARU-robotar
- Mecha Dog
- Tjänsterobot
- Handhållen lidar
- Rehabiliteringsträningsrobot
- Inspektionsrobot
Manualer
Detaljer

En kompakt tvåstegs planetväxelmotor med broms för robotaktuatorer där hög vridmoment och en liten volym är viktiga.
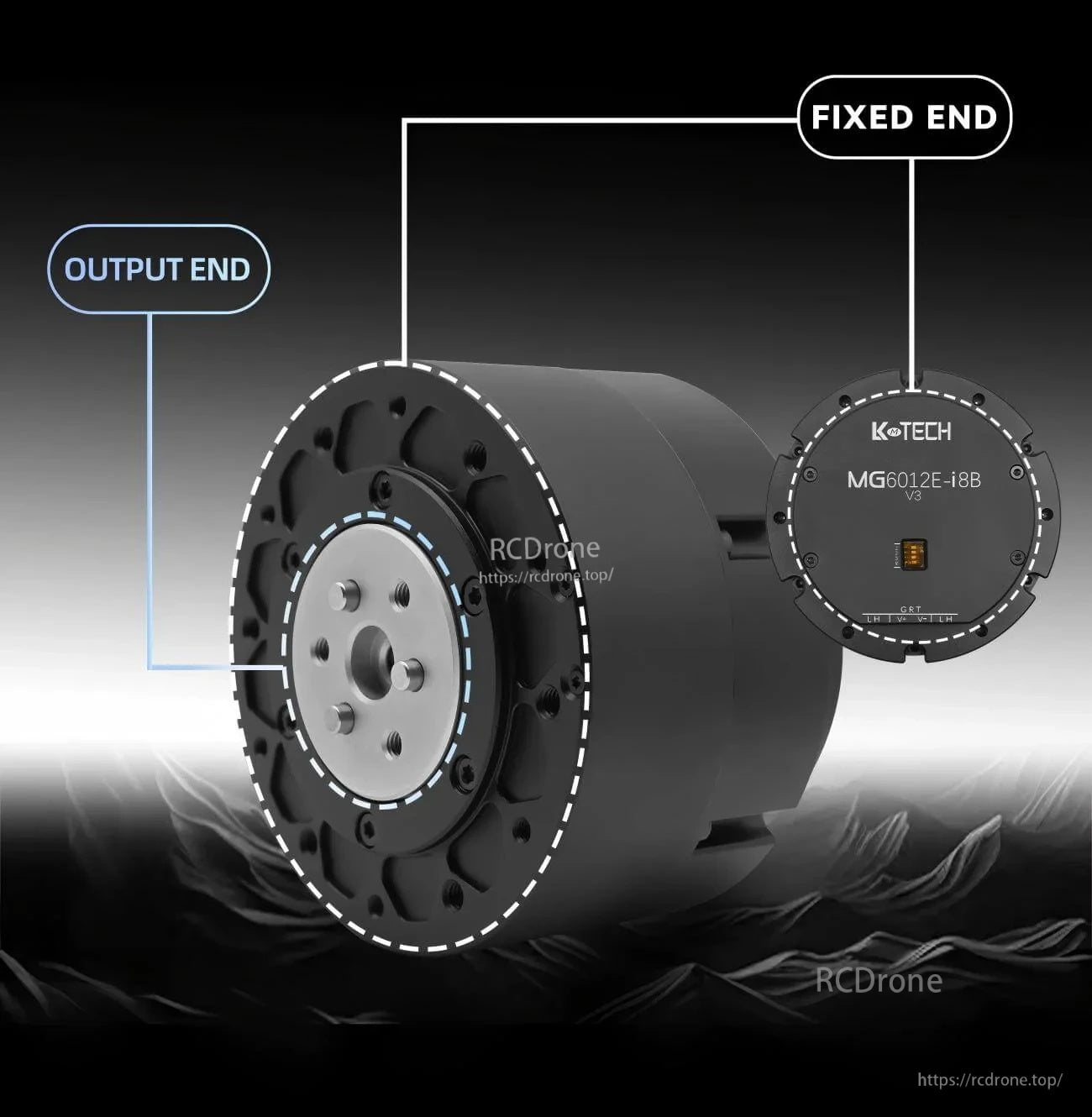
Både utgångsänden och den fasta änden är utformade för enkel montering i leder, armar och andra aktuatorer.

En 18-bitars enkelvarvs absolut magnetisk encoder och integrerat bromsstöd möjliggör precis kontroll och stabil hållning under belastning.
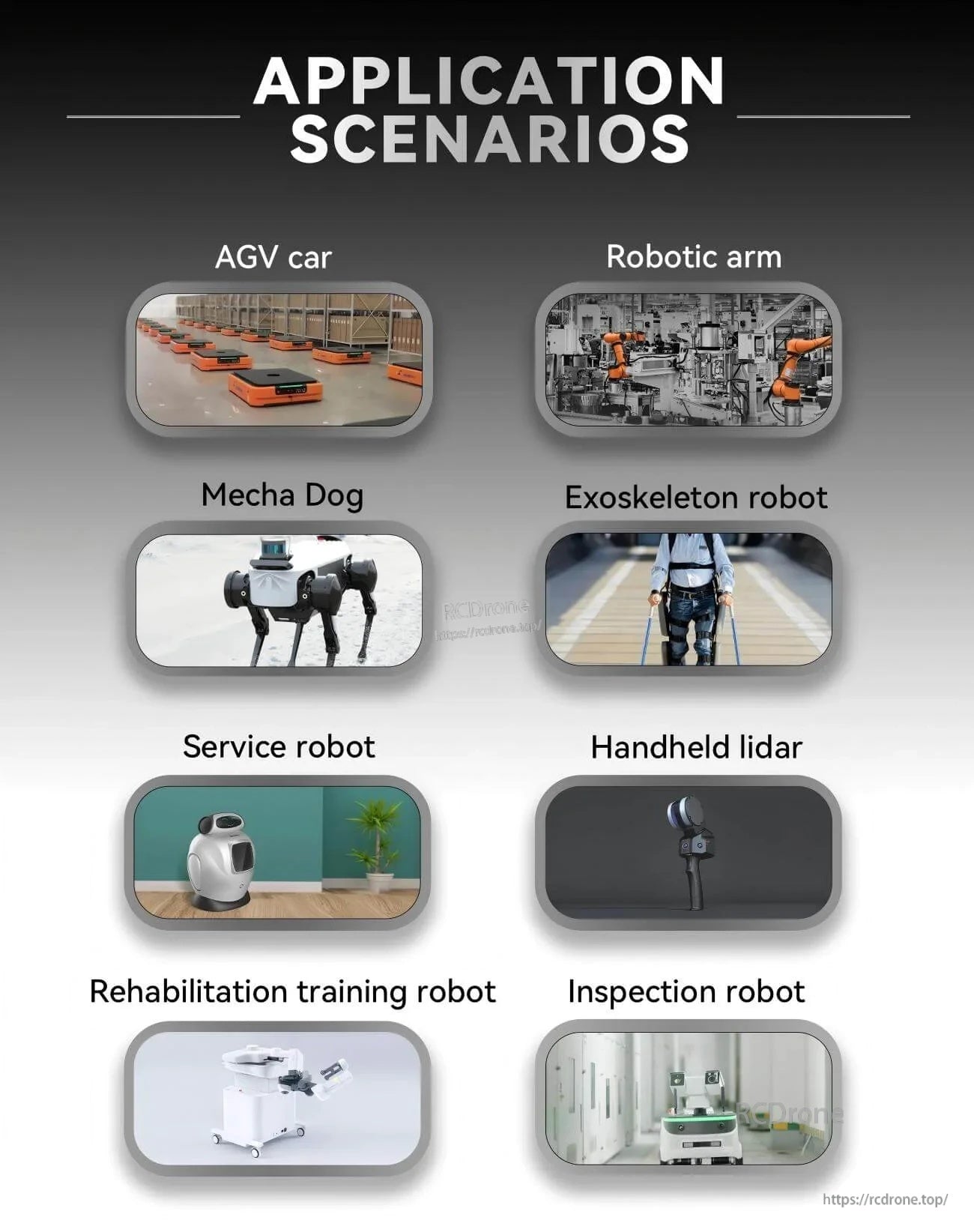
Lämplig för automatiseringsprojekt som AGV-drivmoduler, robotarmar, fyrbenta robotar, exoskelett och inspektionsrobotar.
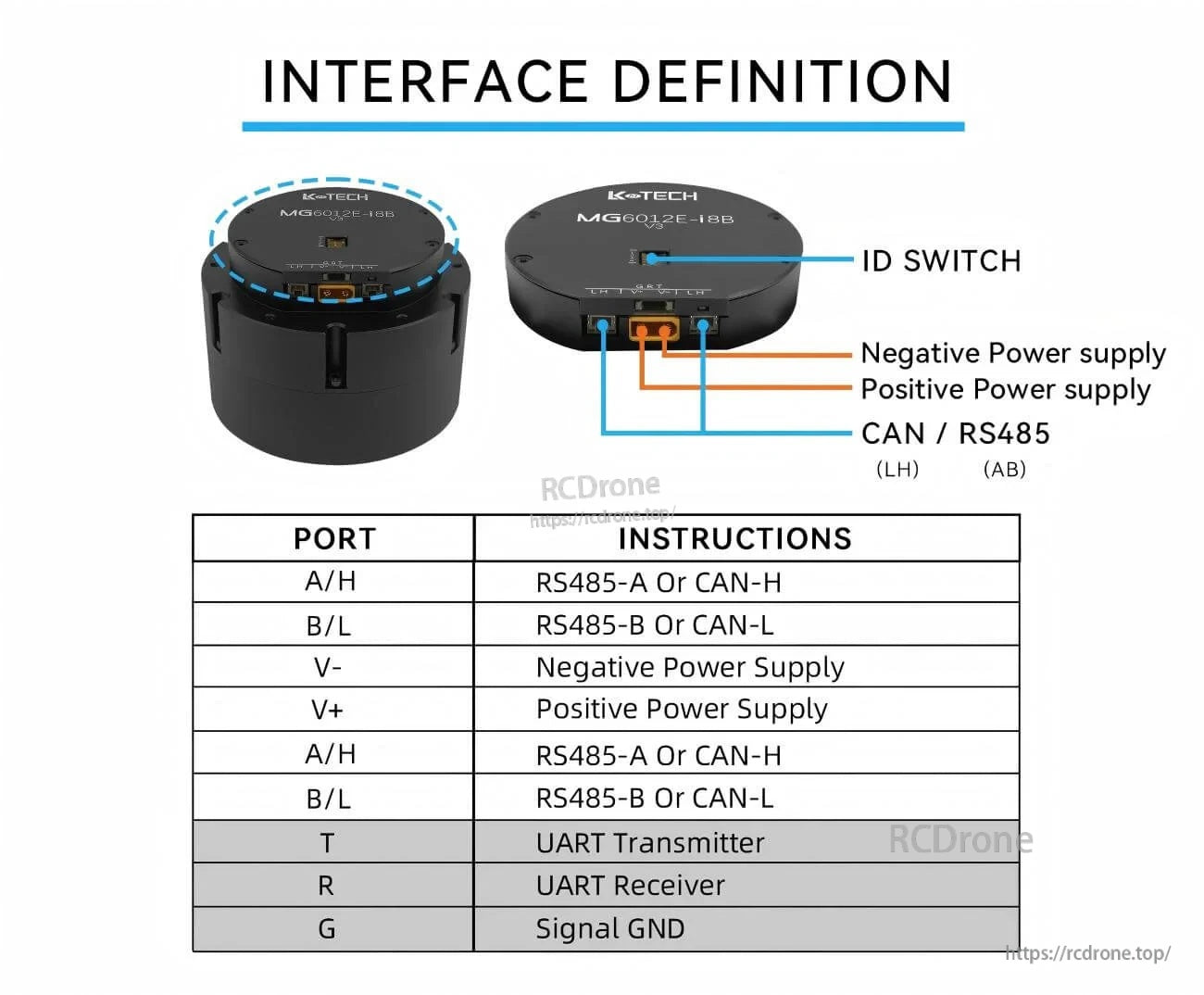
Tydlig portmärkning hjälper till att påskynda kablageslutning för ström, ID-konfiguration och RS485/CAN-kommunikation.
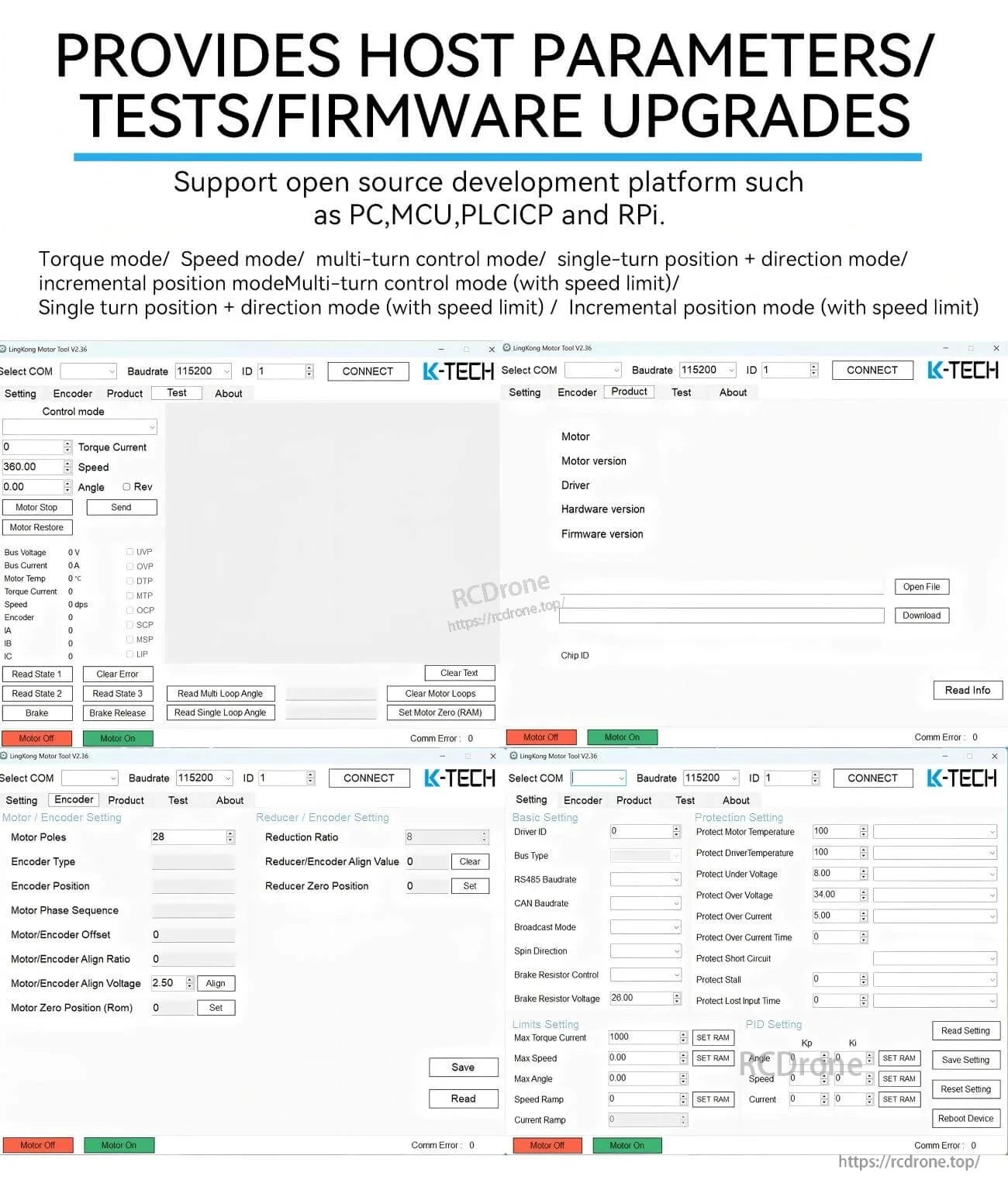
Värdverktyg tillhandahåller parameterkonfiguration, testning och firmwareuppdateringar över vanliga utvecklingsplattformar.
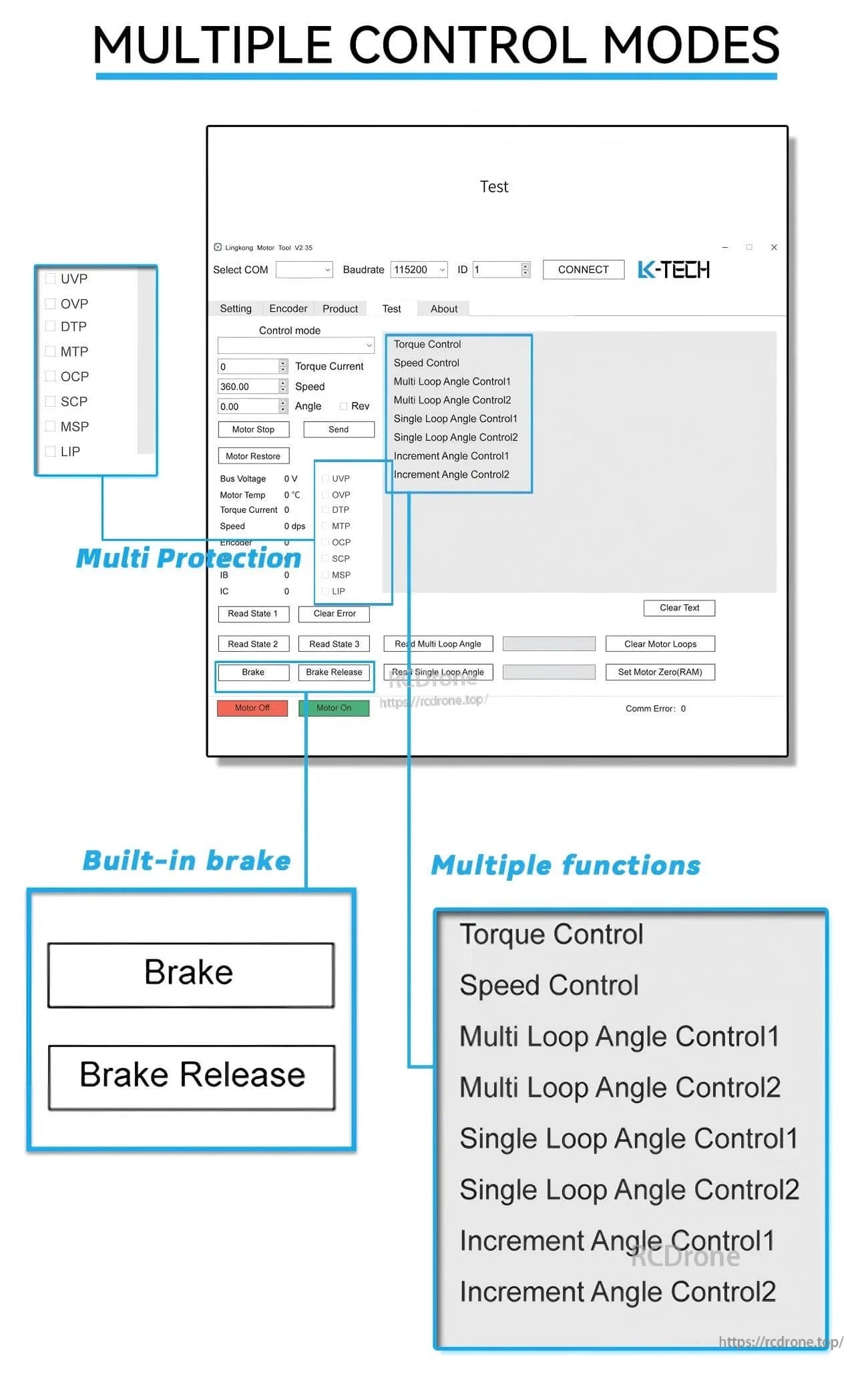
Moment-, hastighets- och positionskontrolllägen kan väljas för att matcha olika aktuator och rörelsekontrollkrav.

Related Collections




