




LKMTECH MG8016E-i6-V2 Motor 48V 670W 12N.m Märkt Vridmoment Planetväxel 1:6 RS485/CAN
LKMTECH MG8016E-i6-V2 Motor 48V 670W 12N.m Märkt Vridmoment Planetväxel 1:6 RS485/CAN
LKMTECH
Ordinarie pris
$495.00 USD
Ordinarie pris
Försäljningspris
$495.00 USD
Enhetspris
per
Skatter ingår.
Frakt beräknas i kassan.
Det gick inte att ladda hämtningstillgänglighet
Översikt
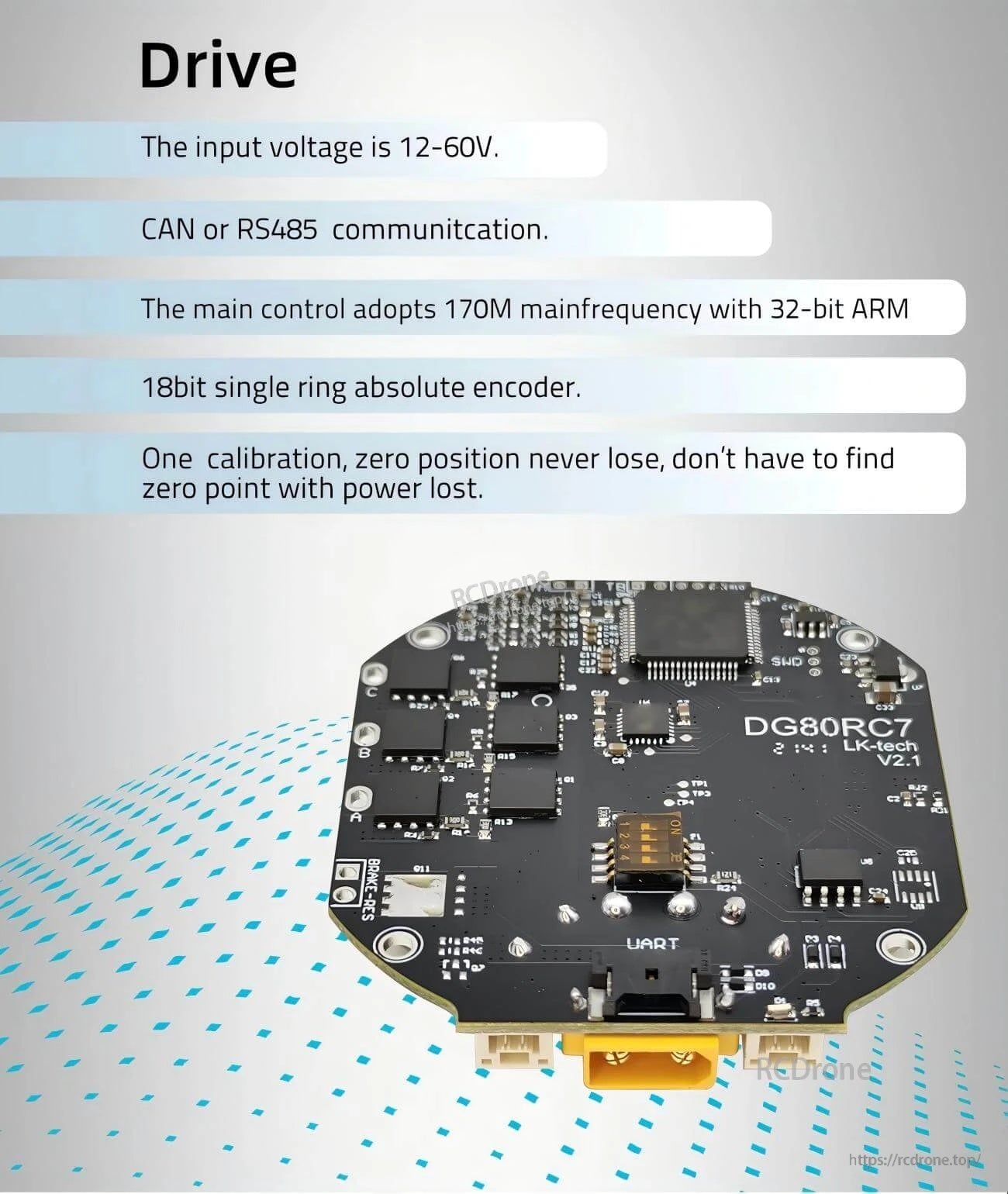
LKMTECH MG8016E-i6-V2-motorn är en borstlös motor med integrerad planetväxel och magnetiska encoders för robotaktivering och rörelsekontrollapplikationer. Den är specificerad för 48V drift och stöder kontroll och kommunikation via RS485 eller CAN när den används med en kompatibel drivning.
Nyckelfunktioner
- Hög uteffekt, stort utgångsmoment, hög precision
- Hög effekt borstlös motor
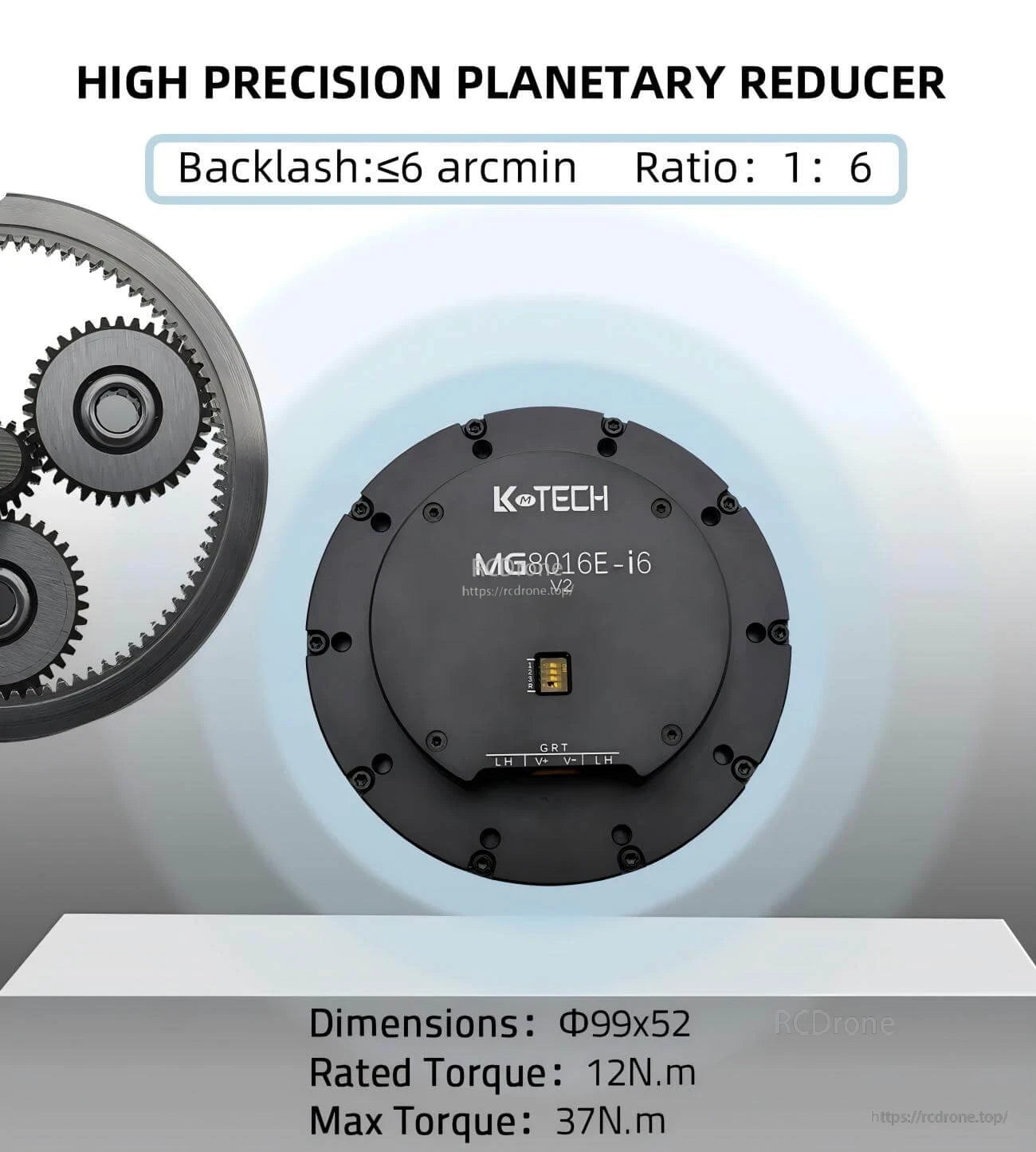
- Hög precision planetväxel (Backlash ≤6 arcmin, Förhållande 1:6)
- Magnetiska encoders: 18-bit (motor) och 14-bit (växel)
- Absolut positionsmedvetenhet (enkelt varv); en kalibrering, nollposition förloras inte efter strömavbrott
- Kommunikation: RS485 eller CAN (med specificerade kommunikationsfrekvenser)
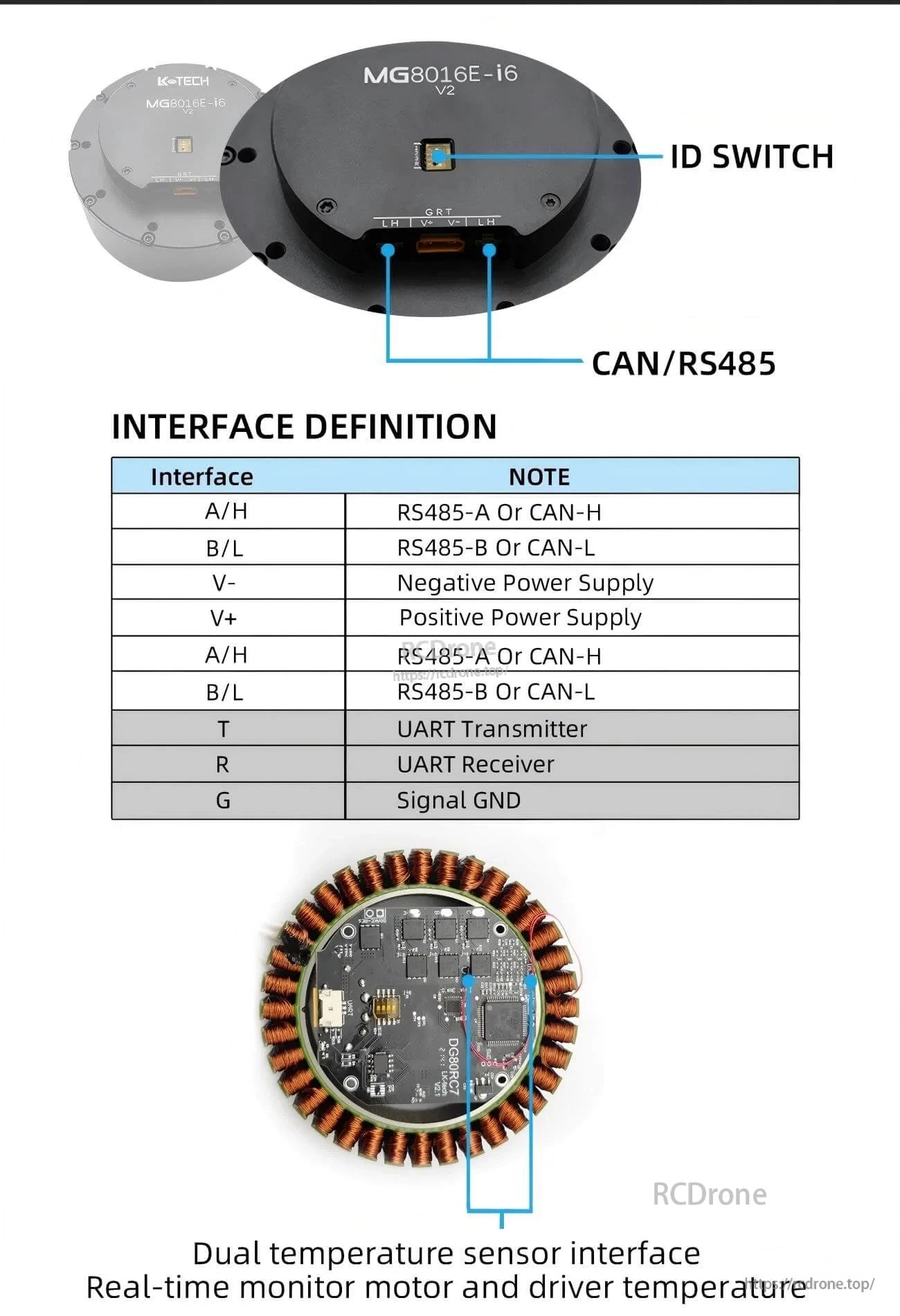
- Dubbla temperatursensorgränssnitt för realtidsövervakning av motor- och drifttemperatur
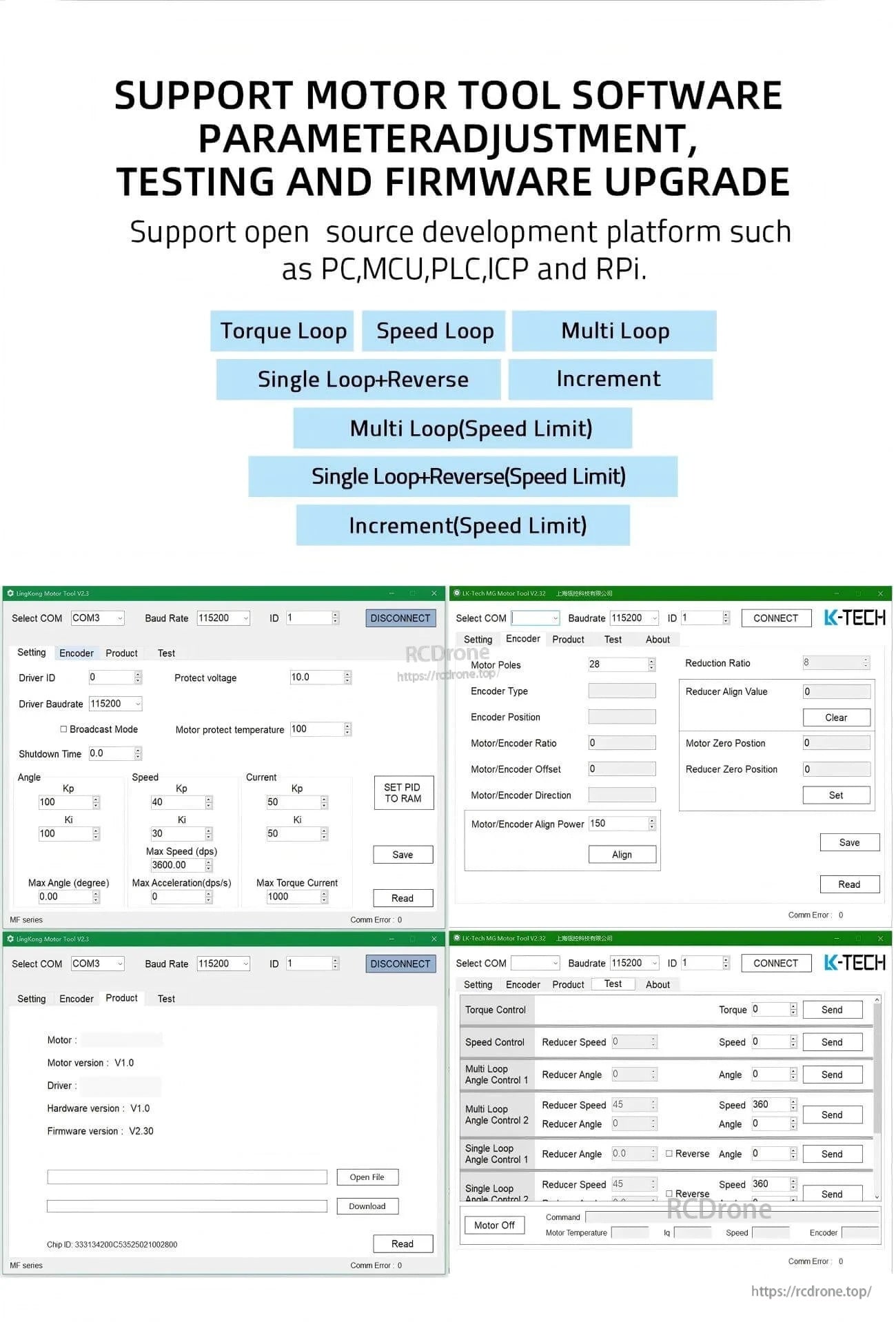
- Stöder motorverktygsprogramvara för parameterjustering, testning och firmwareuppgradering; stöder öppna utvecklingsplattformar som PC, MCU, PLC, ICP och RPi
För kompatibilitetskontroller före försäljning och integrationssupport, kontakta https://rcdrone.top/ eller e-posta [email protected] .
Specifikationer
| Artikelnamn | MG8016E-i6-V2 |
| Nominell spänning | 48V |
| Max hastighet | 300RPM |
| Nominellt vridmoment | 12N.m |
| Nominell hastighet | 258RPM |
| Nominell ström | 8.4A |
| Max effekt | 670W |
| Max vridmoment | 37N.m |
| Hastighetskonstant | 41.7rpm/V |
| Vridmomentkonstant | 0.24N.m/A |
| Varv | 17 |
| Vindingstyp | Δ |
| Fasresistans | 0.6Ω |
| Fasinduktans | 0.6mH |
| Motorpoler | 40 |
| Rotormoment | 2570gcm² |
| Motortemperatur | JA |
| Reducerart | PG5506 |
| Reduceringsförhållande | 1:6 |
| Backlash | ≤6 arcmin |
| Lagrets nominella belastning | 1120N |
| Motorvikt | 759g |
| Mått | Φ99x52 |
| Rekommenderad drivning | DG60E |
| Drivningens ingångsspänning | 12-60V |
| Kommunikation | RS485 ELLER CAN |
| Kommunikationsfrekvens | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Encoder | 18 bit(Motor)&14 bit(Reducer)Magnetisk Encoder |
| Encoder Baudrate(RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Baudrate(CAN) | 1M |
| Kontrollläge | Momentloop(32KHz)/Hastighetsloop(8KHz)/Positionsloop(4KHz) |
| Accelerationskurva | Trapezoidal acceleration |
Gränssnittsdefinition
| A/H | RS485-A eller CAN-H |
| B/L | RS485-B eller CAN-L |
| V- | Negativ strömförsörjning |
| V+ | Positiv strömförsörjning |
| A/H | RS485-A eller CAN-H |
| B/L | RS485-B eller CAN-L |
| T | UART Sändare |
| R | UART-mottagare |
| G | Signal GND |
Tillämpningar
- Humanoida robotar
- Robotarmar
- Exoskelett / bärbara robotar
- Fyra-benta robotar (robot hund)
- AGV-fordon (AGV-bil)
- ARU-robotar
Manualer
Detaljer




Related Collections




