




MagicLab H70 Motormodul för robotik, 30 N·m nominell / 96 N·m topp, 48–54V, CAN/EtherCAT
MagicLab H70 Motormodul för robotik, 30 N·m nominell / 96 N·m topp, 48–54V, CAN/EtherCAT
MagicLab
Det gick inte att ladda hämtningstillgänglighet
Översikt
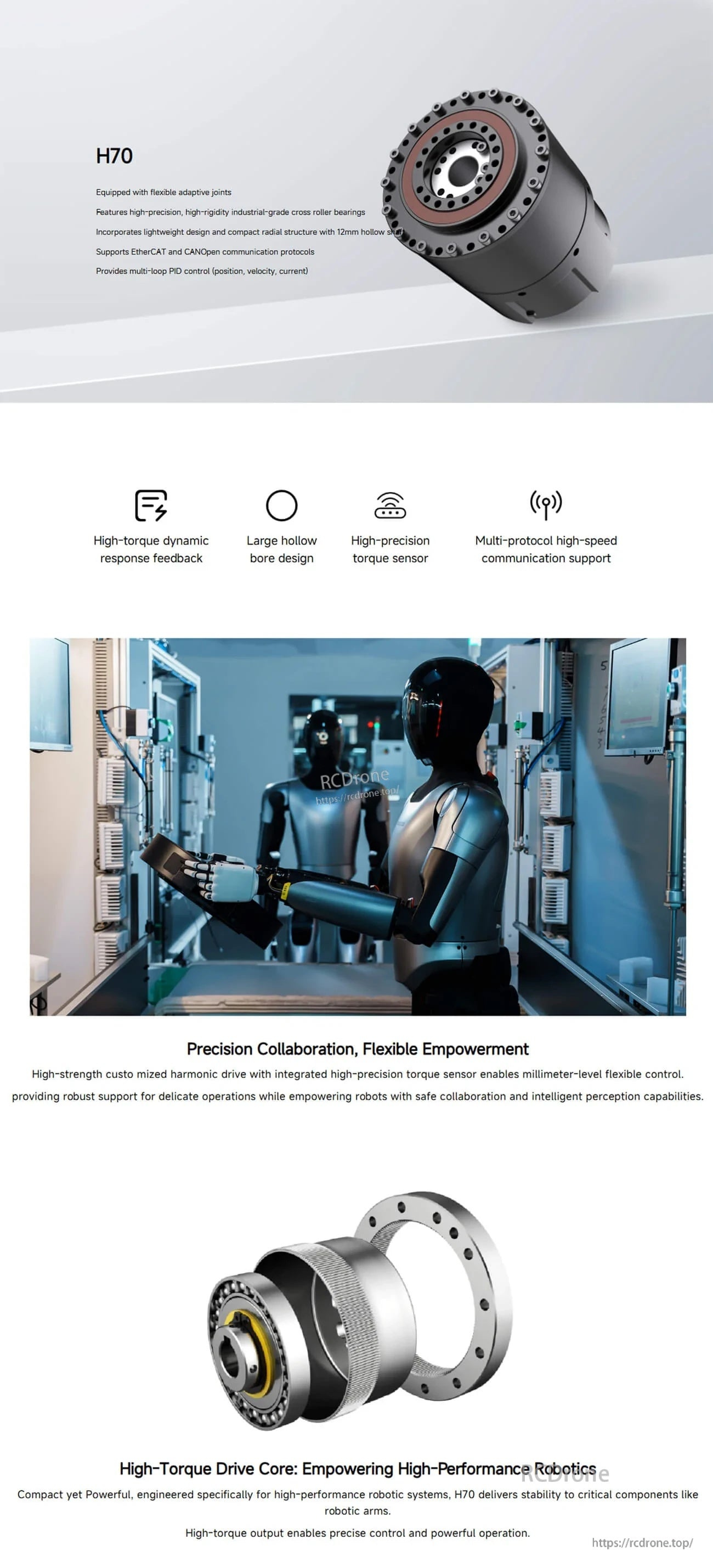
MagicLab H70 Motor är en högmomentmotor modul för robotikapplikationer, utformad för precis rörelsekontroll med dubbel encoderåterkoppling och hög hastighetskontroll. Den stöder CAN / EtherCAT kommunikation och är specificerad för 48V–54V drift.
Nyckelfunktioner
- Utrustad med flexibla adaptiva leder
- Högprecisions, högstyvhets industriella korsrullager
- Lättviktsdesign och kompakt radialstruktur med 12 mm hålaxel
- Stöder EtherCAT och CANopen kommunikationsprotokoll
- Ger multi-loop PID-kontroll (position, hastighet, ström)
- Högmoment dynamisk responsåterkoppling
- Stor håldesign
- Högprecisions momentgivare
- Multi-protokoll hög hastighetskommunikationsstöd
Tillämpningar
- Humanoida robotar
- Robotarmar
- Exoskelett
- Fyra-benta robotar
- AGV-fordon
- ARU-robotar
För integrationsstöd och frågor före försäljning, kontakta [email protected] or besök https://rcdrone.top/.
Tekniska anteckningar
- Högstyrka anpassad harmonisk drivning med integrerad högprecisions vridsensor möjliggör millimeter-nivå flexibel kontroll, vilket ger robust stöd för känsliga operationer samtidigt som det möjliggör säker samarbete och intelligenta perceptionsförmågor.
- Optimerad design av flödestäthet med val av optimal pol-slot passform; minskning av harmoniska distributionskoefficienter och eliminering av tandharmoniska.
- Motorstyrningens karaktäristiska kurva tillhandahållen (graf).
Specifikationer
| Maxhastighet | 30 rpm (48V strömförsörjning) |
| Modulvikt | 900g |
| Nominalt vridmoment | 30 N·m |
| Spetsvridmoment | 96 N·m |
| Mått | φ70*96 |
| Driftspänning | 48V - 54V |
| Spetsström | 11 A |
| Rekommenderad driftsmiljö | -5°C ~ 40°C |
| Encoderkonfiguration | Dubbla encoders |
| Motorencoderupplösning | 19 Bit |
| Kontrollfrekvens | 25,000 Hz |
| Kommunikationsgränssnitt | CAN / EtherCAT |
| Flödestäthetsdiagrammets legend | A [Wb/m] (Max: 0.0034, Min: -0.0034) |
Detaljer
Designad för precisa robotleder, kombinerar MagicLab H70 hög vridmoment med en kompakt hallow-shaft-formfaktor för ren kabeldragning.
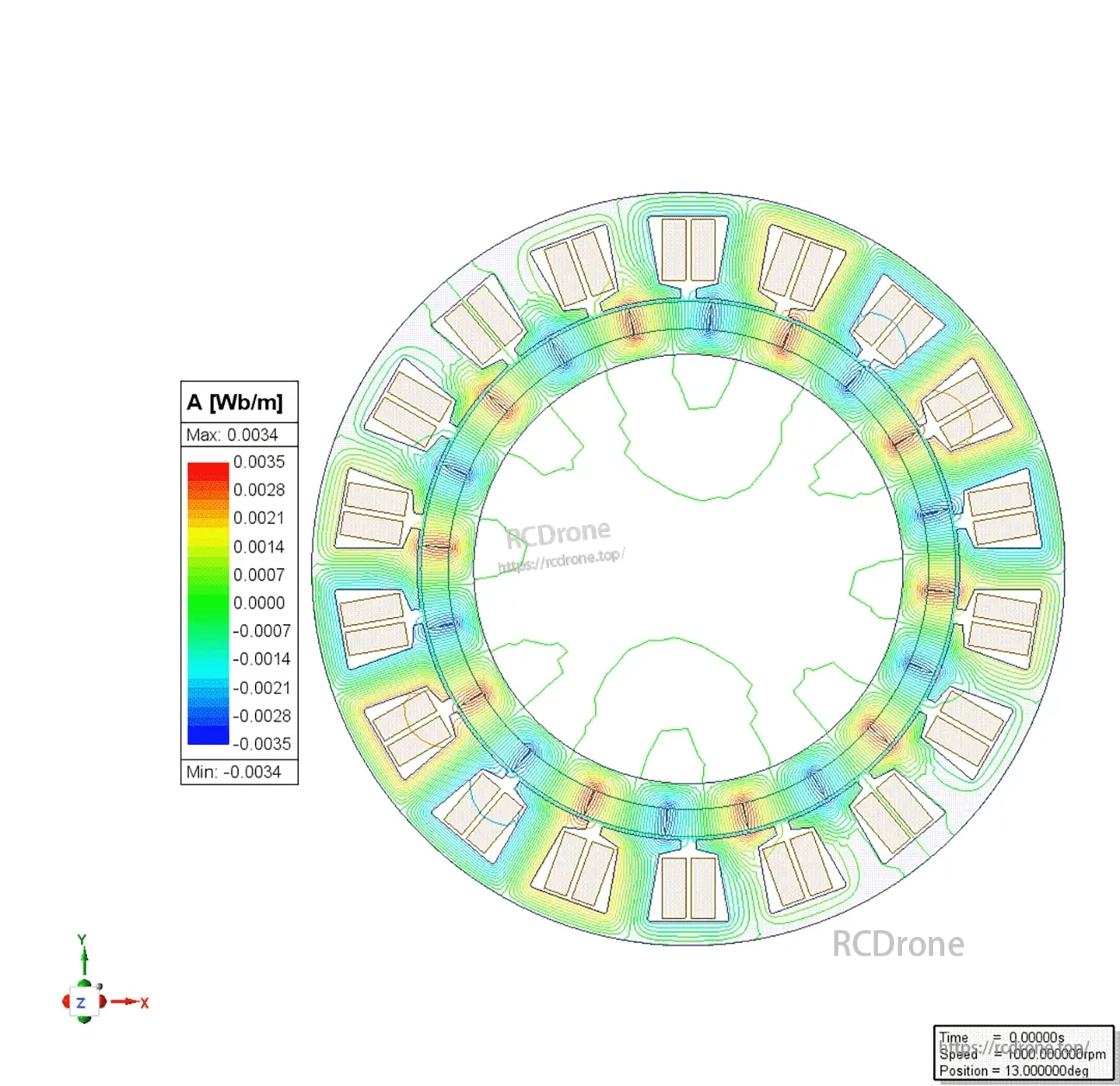
Optimerad flödestäthetsfördelning stödjer en jämnare vridmomentutgång och hjälper till att minska harmoniska effekter i krävande rörelsekontroll.
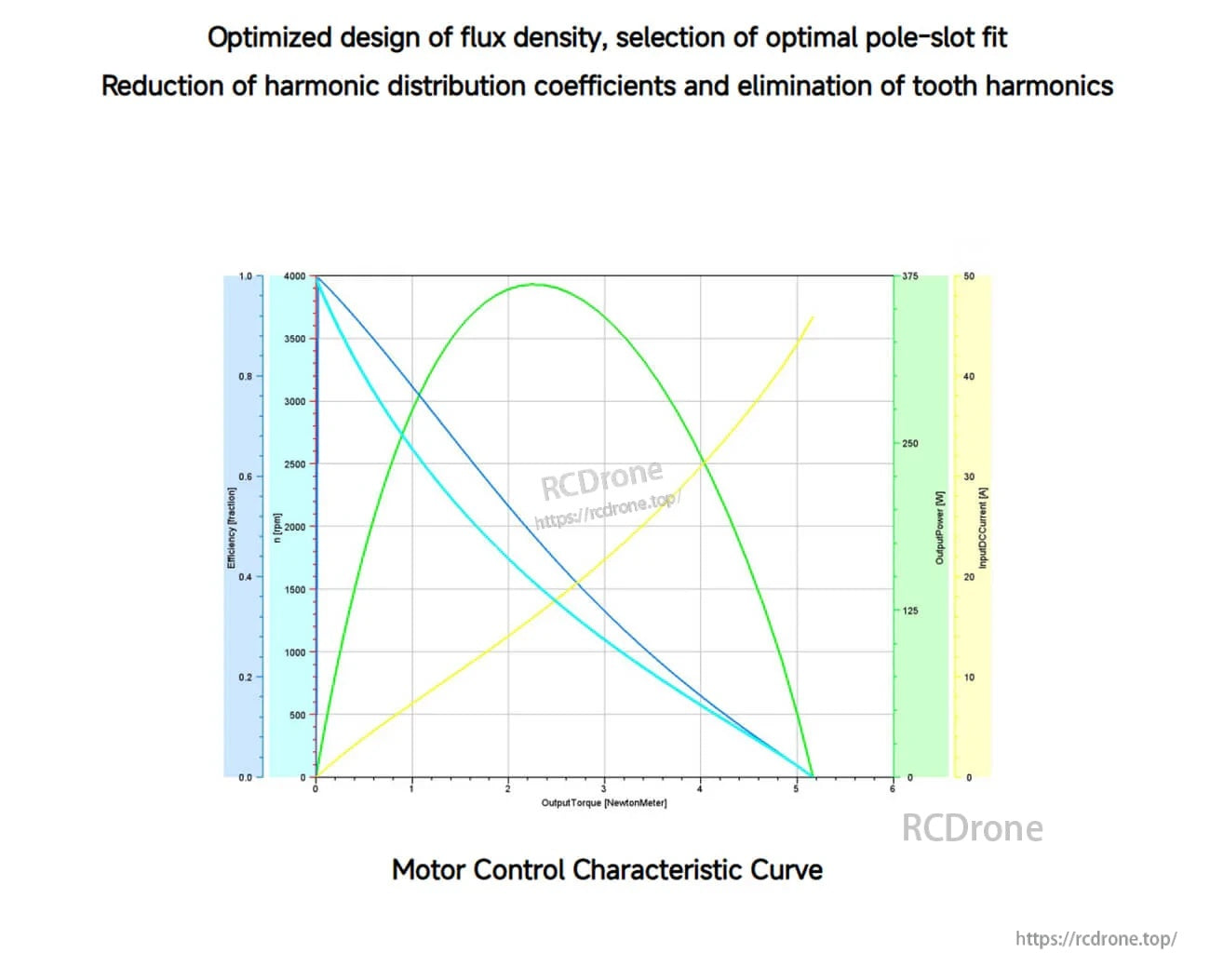
Kontrollkarakteristikkurvor ger en snabb referens för att matcha vridmomentkrav med hastighet och strömmar i din robotdesign.
Related Collections




