




MagicLab P110 Motor 360 N·m Toppmoment, Dubbel Encoder, CAN/EtherCAT Leddrift för Humanoida Robotar
MagicLab P110 Motor 360 N·m Toppmoment, Dubbel Encoder, CAN/EtherCAT Leddrift för Humanoida Robotar
MagicLab
Ordinarie pris
$5,283.00 USD
Ordinarie pris
Försäljningspris
$5,283.00 USD
Enhetspris
per
Skatter ingår.
Frakt beräknas i kassan.
Det gick inte att ladda hämtningstillgänglighet
Översikt
MagicLab P110 Motor är en högmomentleddrivmotor designad för robotledar, med ett dual-encoder system och hög hastighetskommunikationsalternativ (CAN / EtherCAT). Den är avsedd för högbelastningsleder såsom benaktuatorer i fullstora humanoida robotar och industriella stora fyrbenta robotar.
Nyckelfunktioner
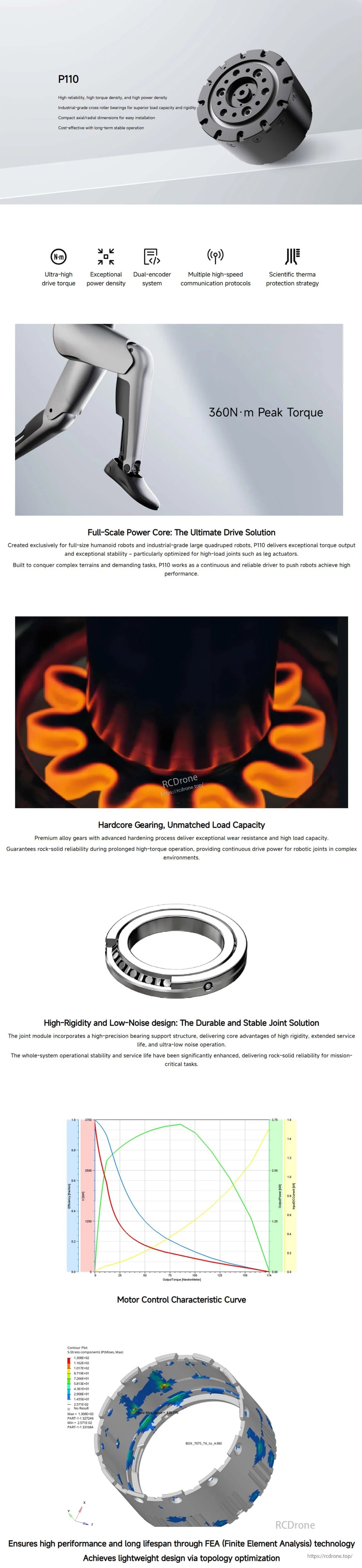
- 360 N·m toppvridmoment
- Ultra-hög drivvridmoment och exceptionell effekt densitet
- Dubbla encodersystem (motorencoderupplösning: 15 Bit)
- Kommunikationsgränssnitt: CAN / EtherCAT (flera hög hastighets kommunikationsprotokoll)
- Vetenskaplig termisk skyddsstrategi
- Hård kärnväxel för lastkapacitet (premiumlegeringsväxlar med avancerad härdningsprocess)
- Högstyv, låg ljudnivådesign med en högprecisionslagerstödstruktur
- FEA (Finite Element Analysis) teknik för hög prestanda och lång livslängd; lättviktsdesign samtidigt som styrka bibehålls
Tillämpningar
- Humanoida robotar
- Robotarmar
- Exoskelett
- Fyra-benta robotar
- AGV-fordon
- ARU-robotar
Specifikationer
| Maxhastighet | 20 rpm (24V strömförsörjning) |
| Modulvikt | 1900g |
| Nominalt vridmoment | 90 N·m |
| Spetsvridmoment | 360 N·m |
| Mått | Φ112*71.5 |
| Driftspänning | 48V - 54V |
| Spetsström | 137 A |
| Kommunikationsgränssnitt | CAN / EtherCAT |
| Encoderkonfiguration | Dubbla encoders |
| Motorencoderupplösning | 15 Bit |
| Kontrollfrekvens | 25,000 Hz |
| Rekommenderad driftmiljö | -5°C ~ 40°C |
För integrations-, gränssnitts- eller konfigurationsfrågor, kontakta [email protected] or besök https://rcdrone.top/.
Detaljer
Byggd för högbelastade humanoida och fyrbenta leder, kombinerar MagicLab P110 360 N·m spetsmoment med dubbel encoderfeedback och CAN/EtherCAT-kommunikation för precis, responsiv aktivering.
Related Collections




