MATEK CAN-L4-BM - Mateksys AP_PERIPH KAN DIGITAL POWER MONITOR
MATEK CAN-L4-BM - Mateksys AP_PERIPH KAN DIGITAL POWER MONITOR
MATEKSYS
Det gick inte att ladda hämtningstillgänglighet
MATEK CAN-L4-BM - Mateksys AP_PERIPH KAN DIGITAL POWER MONITOR SPECIFIKATIONER
Använd: Fordon och fjärrkontrollleksaker
Rekommendera ålder: 12+y,14+y
Ursprung: Kina
Material: Kompositmaterial
Varumärke: MATEKSYS
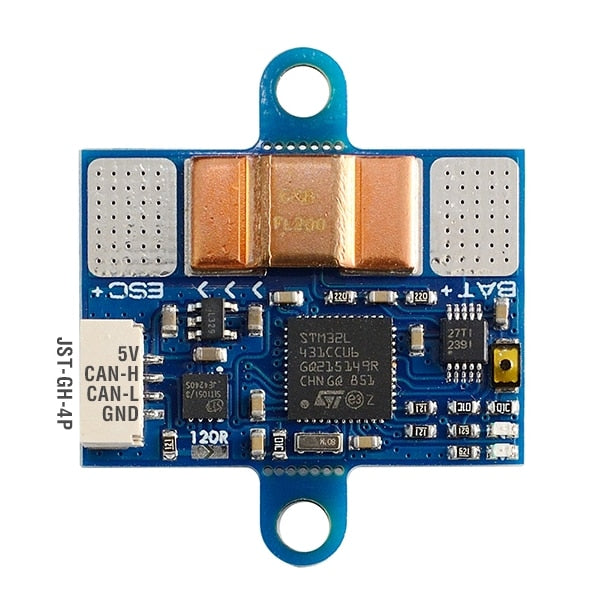
AP_PERIPH CAN DIGITAL POWER MONITOR, CAN-L4-BM
Ström 0~204,8A, spänning 0~85V, CAN/DroneCAN-protokoll
-
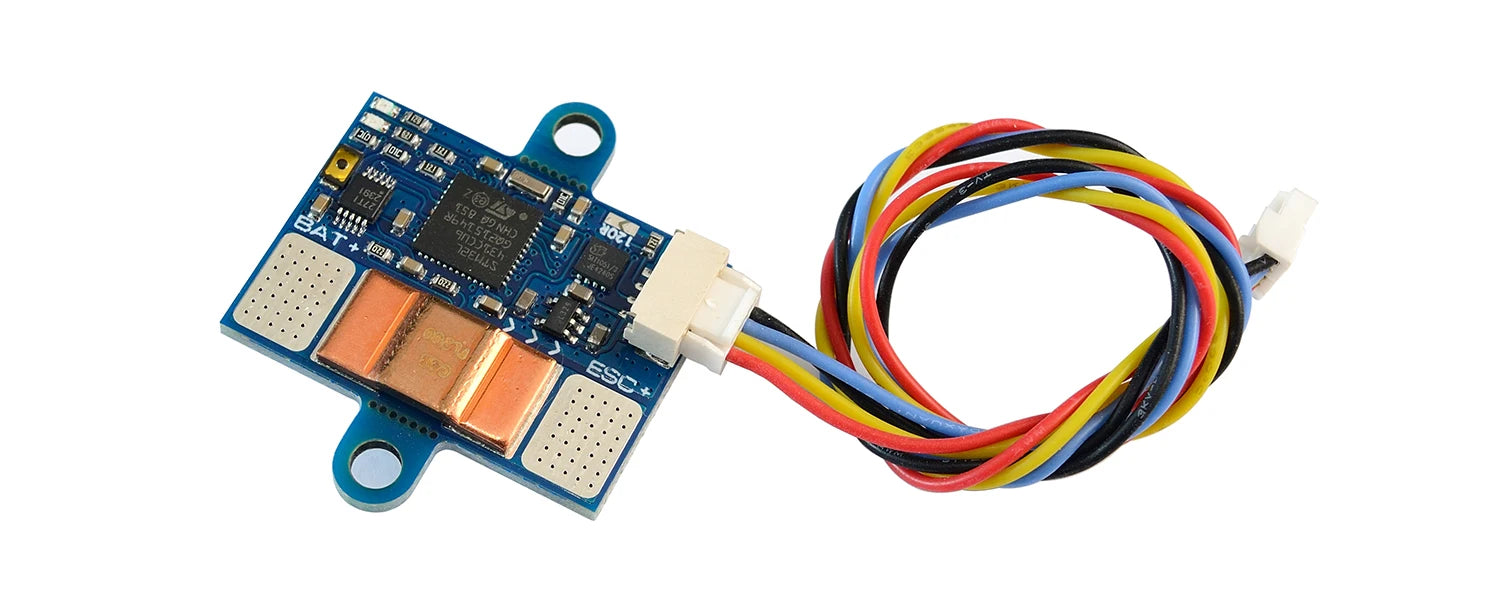
CAN-L4-BM är en ultraprecis digital strömmonitor baserad på TI INA239 och ArudPilot AP_Periph firmware.
-
Motståndet för denna ledande väg är typiskt 200 μΩ, vilket ger låg effektförlust i applikationen.
-
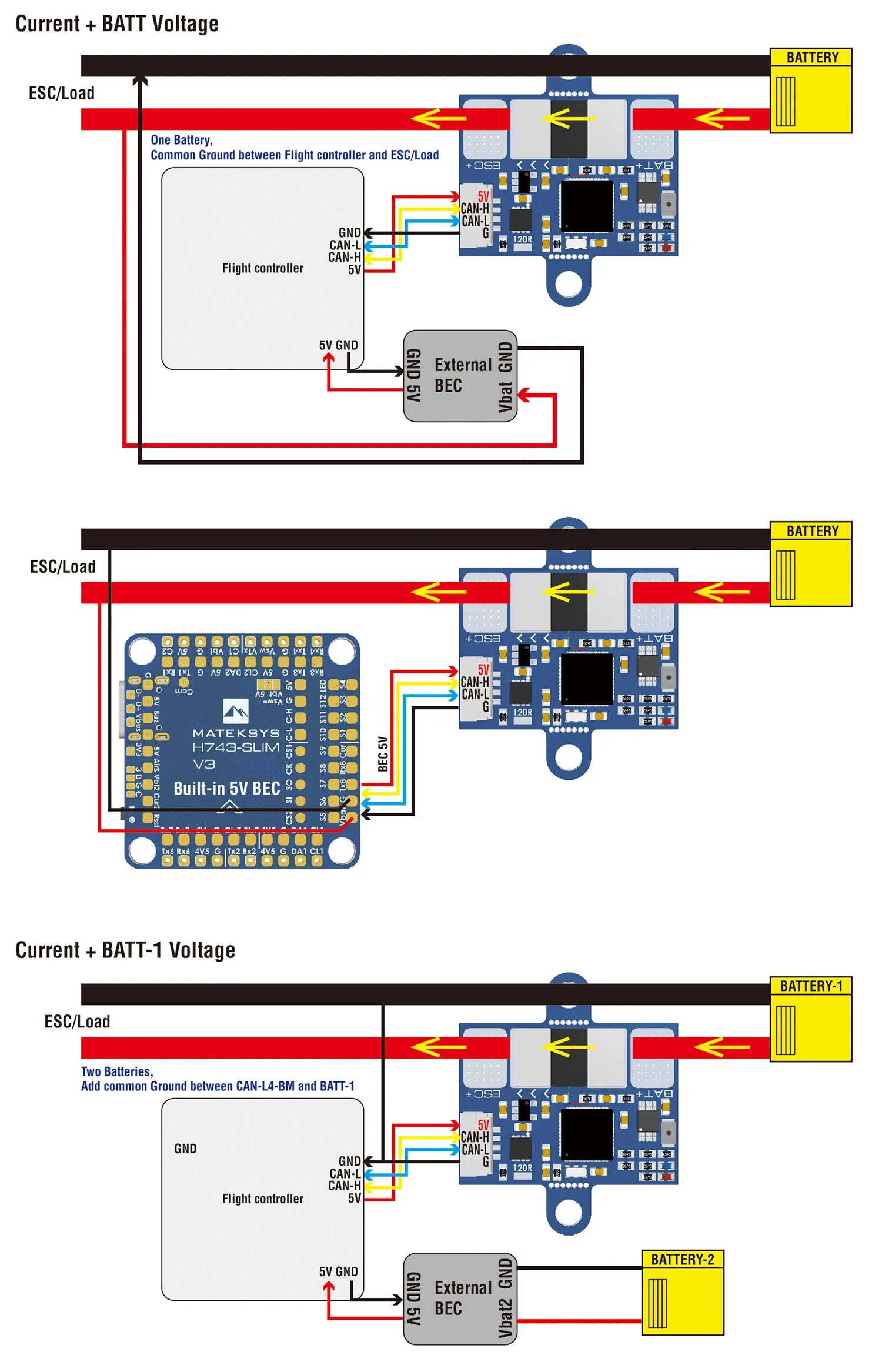
Med den här enheten, ingen kalibrering krävs, flygkontroller som stöder DroneCAN-protokollet kan enkelt få exakta ström- och bussspänningsavläsningar via CAN-bussen.
Specifikationer
-
MCU: STM32L431xC, 256KB Flash
-
INA239 85-V, 16-bitars, högprecisionseffektmonitor IC med SPI-gränssnitt
-
Batterispänningsingång: 0~85V
-
Aktuellt avkänningsintervall: 0~204,8A
-
Belastningsström på strömavkänningsmotstånd: 150A (kontinuerlig), 204,8A (burst)
-
Spänningsnoggrannhet: ± 0,1 %
-
Strömnoggrannhet: ± 2 %
-
Gränssnitt
-
CAN, DroneCAN-protokoll
-
UART2, reserv, DFU
-
ST debug, SWCLK & SWDIO
-
-
LED
-
Blå, blinkar snabbt, startar
-
Blå, Långsamt blinkande, fungerar
-
Röd, 3,3V-indikator
-
Strömförsörjning för CAN-L4-BM-kort: 4,5~5,5V @5V pad/stift
-
Strömförbrukning: 10mA
-
Driftstemperaturer: -40~85 °C
-
Fysisk
-
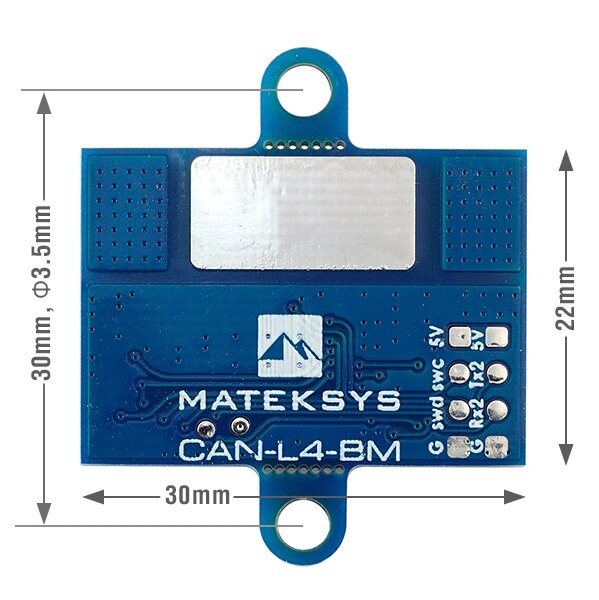
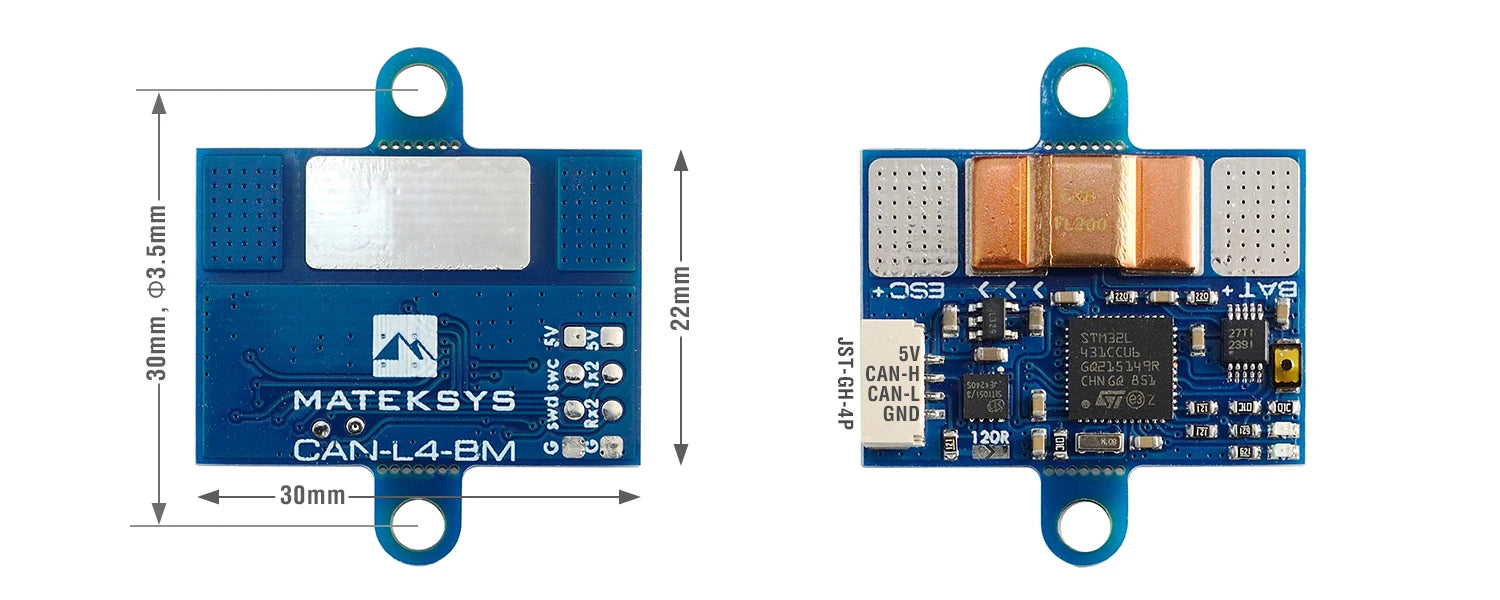
Brädstorlek: 30mm*22mm*3mm. 4g
-
3D-fil : CAN-L4-BM_STEP.zip
-
-
Firmware
-
ArduPilot AP_Periph MatekL431-BattMon
-
Uppdatera via DroneCAN GUI Tool
-
-
Parametrar
-
CAN_P1_DRIVER = 1 om ansluten till CAN bus1-port eller CAN_P2_DRIVER = 1 om ansluten till CAN bus2-port
-
BATTx_MONITOR = 8 (DroneCAN-BatteryInfo)
-
Förpackning
-
1x CAN-L4-BM-kort
-
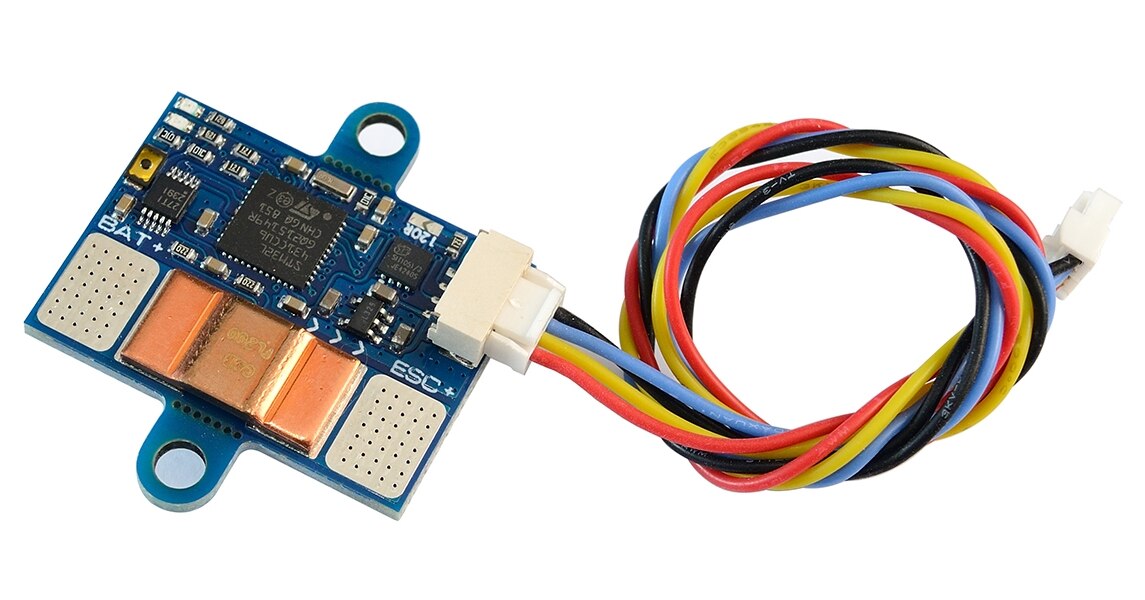
1x JST-GH-4P till JST-GH-4P 20 cm silikontråd
Tips
-
Den stora plattan på undersidan är en död pad. Inget kretsnätverk på den.
-
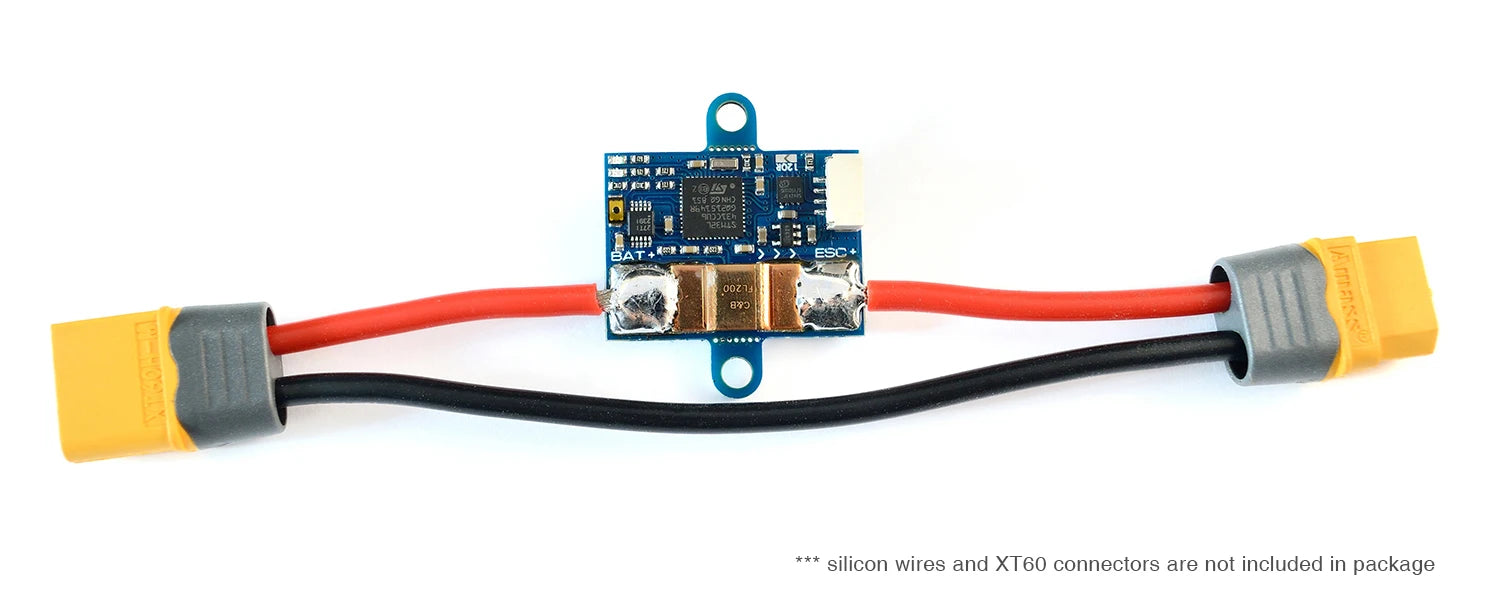
Löt de positiva ledningarna så nära båda sidorna av strömavkänningsmotståndet som möjligt.
-
2 öron för montering kan skäras av om du inte behöver det.
-
Om CAN-ledningarna är för långa, överbrygga "120R"-bygeln.
Related Collections