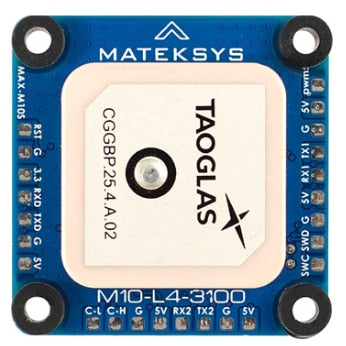
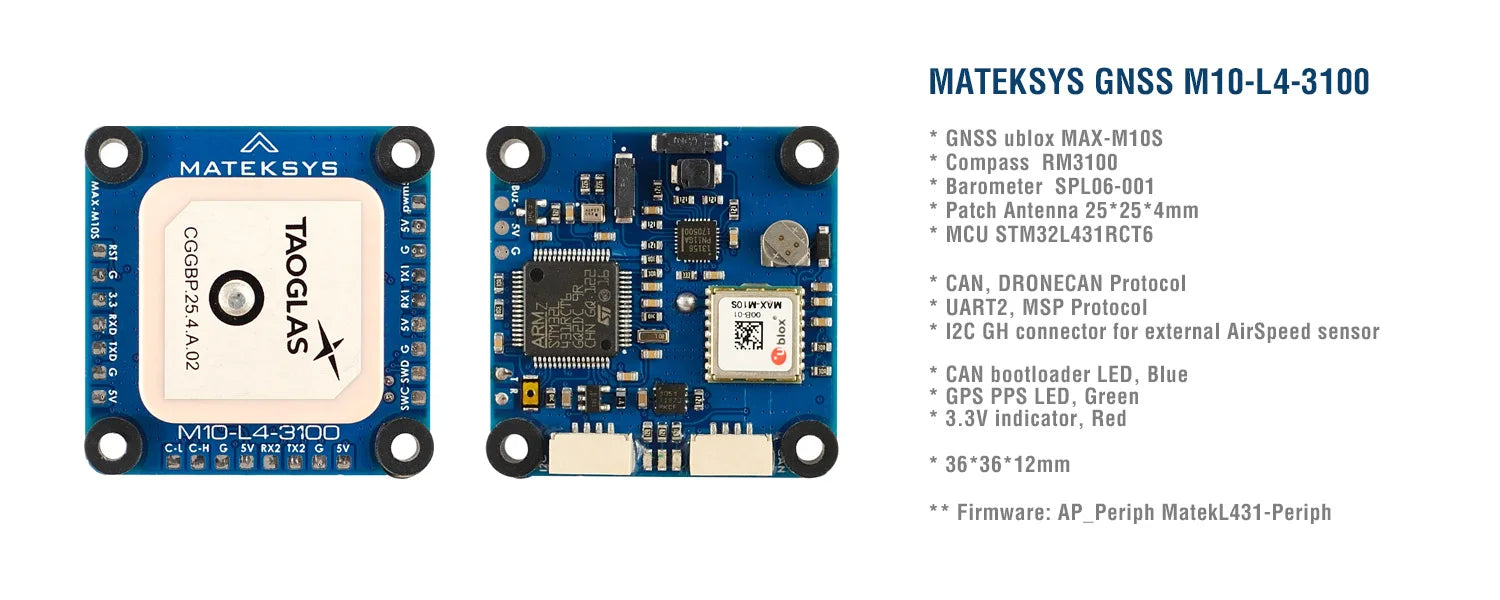
MATEK M10-L4-3100 GPS-modul - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEK M10-L4-3100 GPS-modul - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEKSYS
Det gick inte att ladda hämtningstillgänglighet
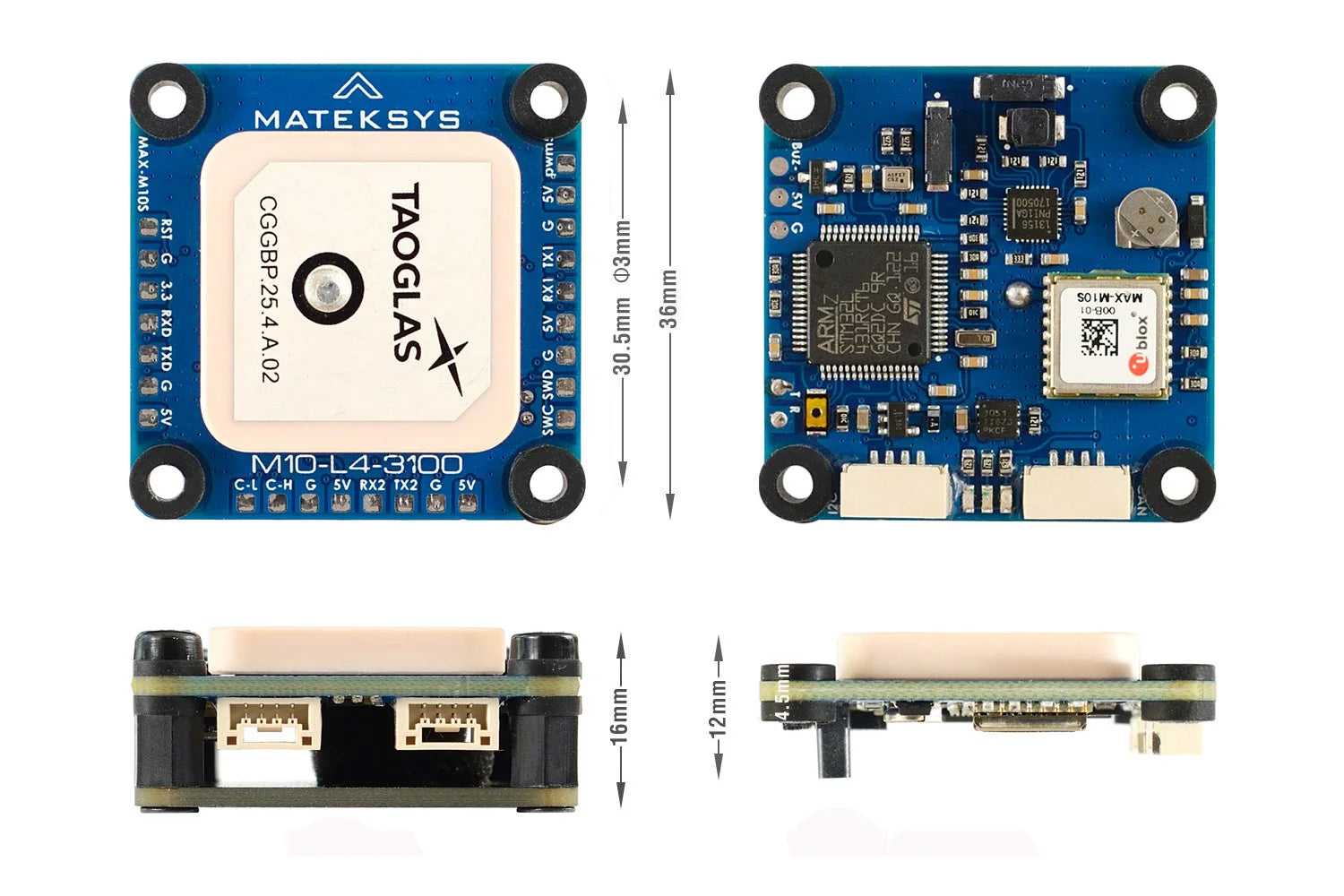
MATEK M10-L4-3100 - Mateksys AP_PERIPH GNSS SPECIFIKATIONER
Använd: Fordon och fjärrkontrollleksaker
Rekommendera ålder: 12+y,14+y,6-12y
Ursprung: Kina
Material: Kompositmaterial
Varumärke: MATEKSYS
AP_PERIPH GNSS M10-L4-3100
AP_Periph L431 CAN-nod, MAX-M10S, RM3100, SPL06-001, DroneCAN-protokoll & UART_MSP
-
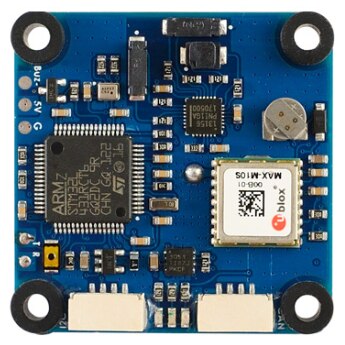
M10-L4-3100 är baserad på ArudPilots AP_Periph firmware, Det är en kringutrustning för GNSS+KOMPASS+BAROMETER med CAN/DroneCAN och UART/MSP-gränssnitt.
-
M10-L4-3100 använder multi-konstellation GNSS som drivs av u-blox MAX-M10S, MAX-M10S är en samtidig GNSS-mottagare som kan ta emot och spåra flera GNSS-system. Tack vare multibands RF front-end-arkitekturen kan alla fyra stora GNSS-konstellationer, GPS, Galileo, GLONASS och BeiDou tas emot samtidigt.
-
M10-L4-3100 integrerar en industrikompass PNI RM3100 som ger hög upplösning, låg strömförbrukning, ingen hysteres, stort dynamiskt omfång och höga samplingsfrekvenser.
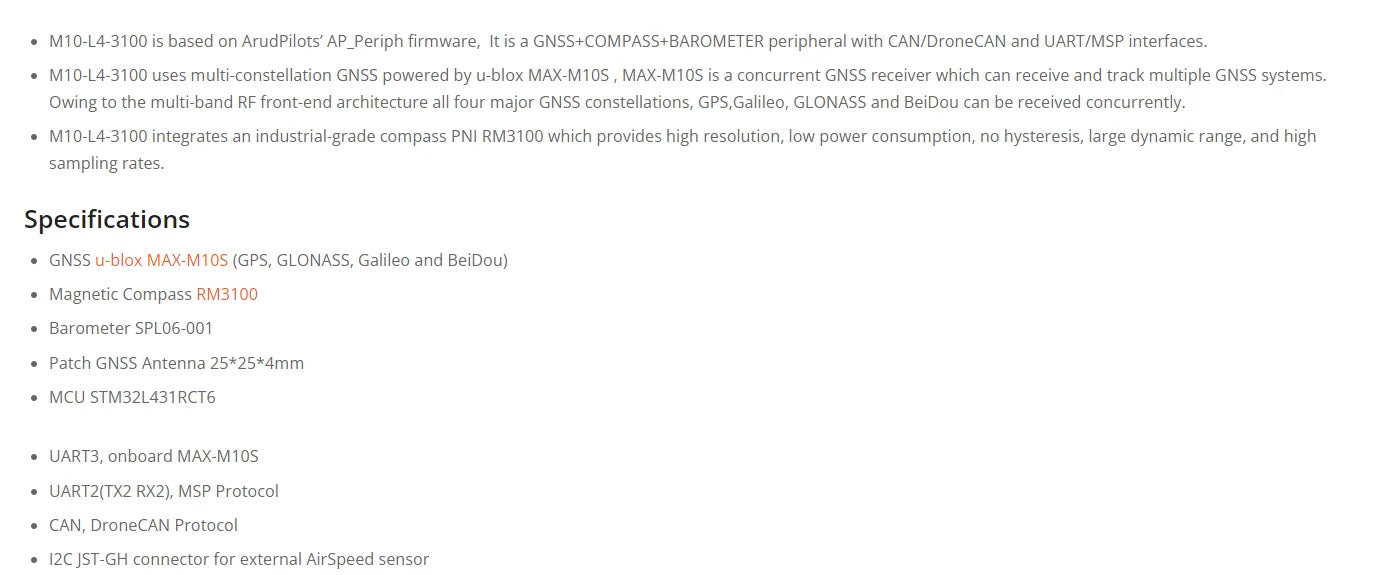

standardkonfigurationen på MAX-M1OS med ublox FWS . är samtidig mottagning av GPS, Galileo och BeiDou BI med QZSS och SBAS aktiverade. GLONASS är inaktiverat som standard Beidou B1I (1575,42 MHz) och kan inte aktiveras samtidigt .
CAN (UAVCAN-protokoll)-anslutning
-
M10-L4-3100 5V — FC 4,5V ~ 5.3V
-
M10-L4-3100 CAN-H — FC CAN High
-
M10-L4-3100 CAN-L — FC CAN Low
-
M10-L4-3100 G — FC G/GND
FC UAVCAN-parametrar(ArduPilot)
-
CAN_D1_PROTOCOL -> 1
-
CAN_P1_DRIVER -> 1
-
GPS_TYPE -> 9 (DroneCAN)
-
COMPASS_TYPEMASK -> 0 (se till att DroneCAN är omarkerad)
——————————————————————————
Om du ansluter I2C lufthastighetssensor till I2C-porten på M10-L4-3100
-
ARSPD_TYPE -> 8 (UAVCAN)
-
ARSPD_USE -> 1
Och du måste ställa in CAN Node parametrar för lufthastighetssensor ansluten till I2C-porten på M10-L4-3100
Uppdragsplanerare > Initial installation > Valfri hårdvara > UAVCAN > SLCan Mode CAN1 > Parametrar
-
MS4525 ARSP_TYPE -> 1 (standard i hwdef)
-
MS5525 ARSP_TYPE -> 3 stöder endast MS5525 med adress 0x77
-
SDP3X ARSP_TYPE -> 6
-
DLVR-L10D ARSP_TYPE -> 9
-
Skriv och starta om
——————————————————————————
Om du ansluter 2812LED DIN till PWM5 pad
-
NTF_LED_TYPES -> (se till att DroneCAN är markerad)
SLCan-läge CAN1 > Parametrar
-
OUT5_FUNCTION 120
-
NTF_LED_TYPES 455
-
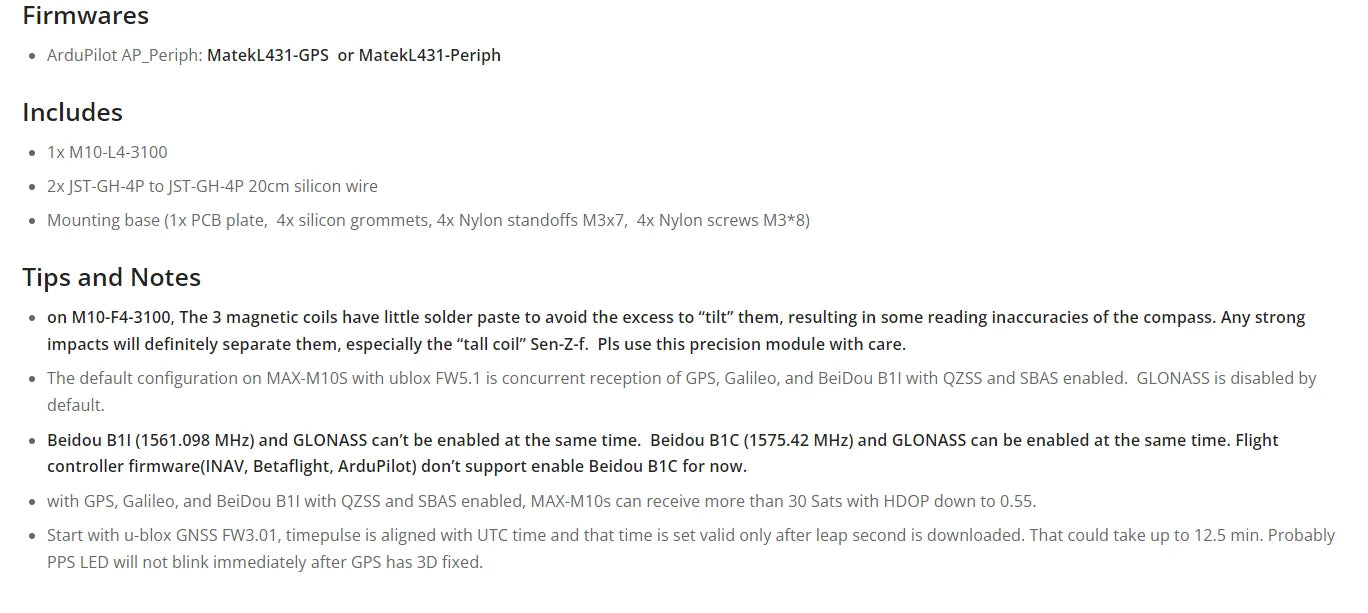
AP_Periph fw måste vara “MatekL431-Periph”, MSP-funktionen är inaktiverad i “MatekL431-GPS”
UART (MSP-protokoll)-anslutning
-
M10-L4-3100 5V — FC 4,0V ~ 5,3V
-
M10-L4-3100 TX2 — FC reserv UART_RX
-
M10-L4-3100 RX2 — FC reserv UART_TX (inte nödvändigt)
-
M10-L4-3100 G — FC G/GND
ArduPilot (sedan 4.1.x) FC-parametrar
-
Serialx_PROTOCOL = 32 (MSP) där x är den SERIELLA porten som används för anslutning på autopilot.
-
Serialx_BAUD = 115 där x är den SERIELLA porten som används för anslutning på autopilot.
-
GPS TYPE = 19 (MSP)
-
BARO_PROBE_EXT = 4096 (MSP Baro)
-
BARO_PRIMARY = 1 (Om du vill använda MSP baro som primär baro, lämna annars som standard)
-
COMPASS_TYPEMASK 0 (eller se till att MSP-biten inte är markerad)
INAV (sedan 2.6) FC-parametrar
-
M10-L4-3100 är kompatibel med alla flygkontroller som stöds av INAV över en extra UART.
-
På fliken portar, Aktivera MSP på motsvarande UART som M10-L4-3100 ansluten, Aktivera INTE "GPS" på den UART. välj Baudrate 115200.
-
funktion GPS
-
set gps_provider = MSP
-
set mag_hardware = MSP
-
set baro_hardware = MSP
-
set align_mag = CW90, om kompassen är platt monterad med pilen vänd framåt, och flygkontrollerns pil är vänd framåt också.
Related Collections