


MATEK Mateksys EXPRESSLRSELRS 2,4GHZ VARIO MOTTAGARE
MATEK Mateksys EXPRESSLRSELRS 2,4GHZ VARIO MOTTAGARE
MATEKSYS
Det gick inte att ladda hämtningstillgänglighet
MATEK Mateksys EXPRESSLRSELRS 2.4GHZ VARIO MOTTAGARSPECIFIKATIONER
Använd: Fordon och fjärrkontrollleksaker
Rekommendera ålder: 12+y,14+y,3-6y,6-12y,0-3y
Ursprung: Kina
Material: Kompositmaterial
Varumärke: MATEKSYS
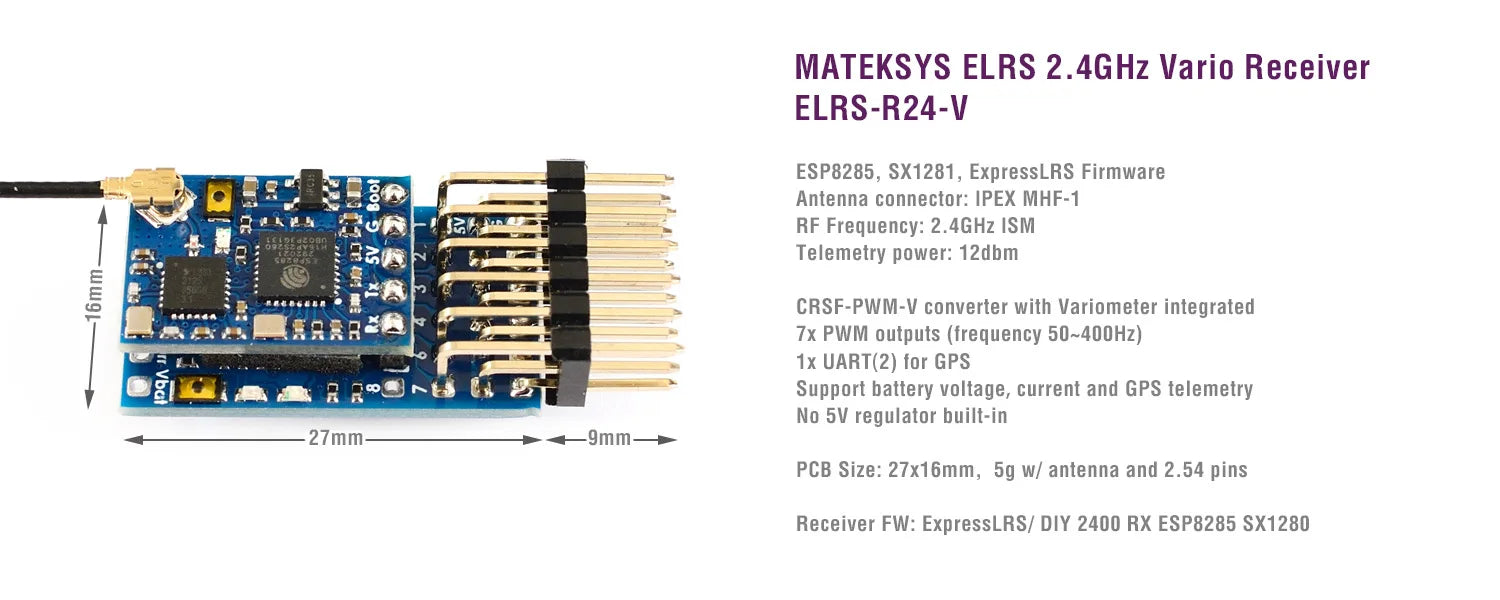
EXPRESSLRS/ELRS 2,4GHZ VARIO MOTTAGARE
ExpressLRS firmware, 2,4GHz, 7x PWM-utgångar, Variometersensor integrerad.
BARO "ALT" LÄSNING
-
Börja med EdgeTX 2.7.1/OpenTX 2.3.15 och ExpressLRS 2.5, Baro Alt-telemetri-ID stöds i CRSF-protokollet.
-
Du måste uppdatera sändaren, ExpressLRS TX-modulen och mottagaren till senaste versionen.
-
och uppdatera CRSF-PWM-V till V2.3.0 eller senare. http://www.mateksys.com/?portfolio=crsf-pwm#tab-id-6

-
Specifik för glidarna och andra fasta vingar. Liten i formfaktorn, den kan installeras i segelflygplan med begränsade lastutrymmen som DLG:er och högpresterande slopers. Att inte behöva installera en extra höjdmätare/variometer sparar också utrymme och vikt.
-
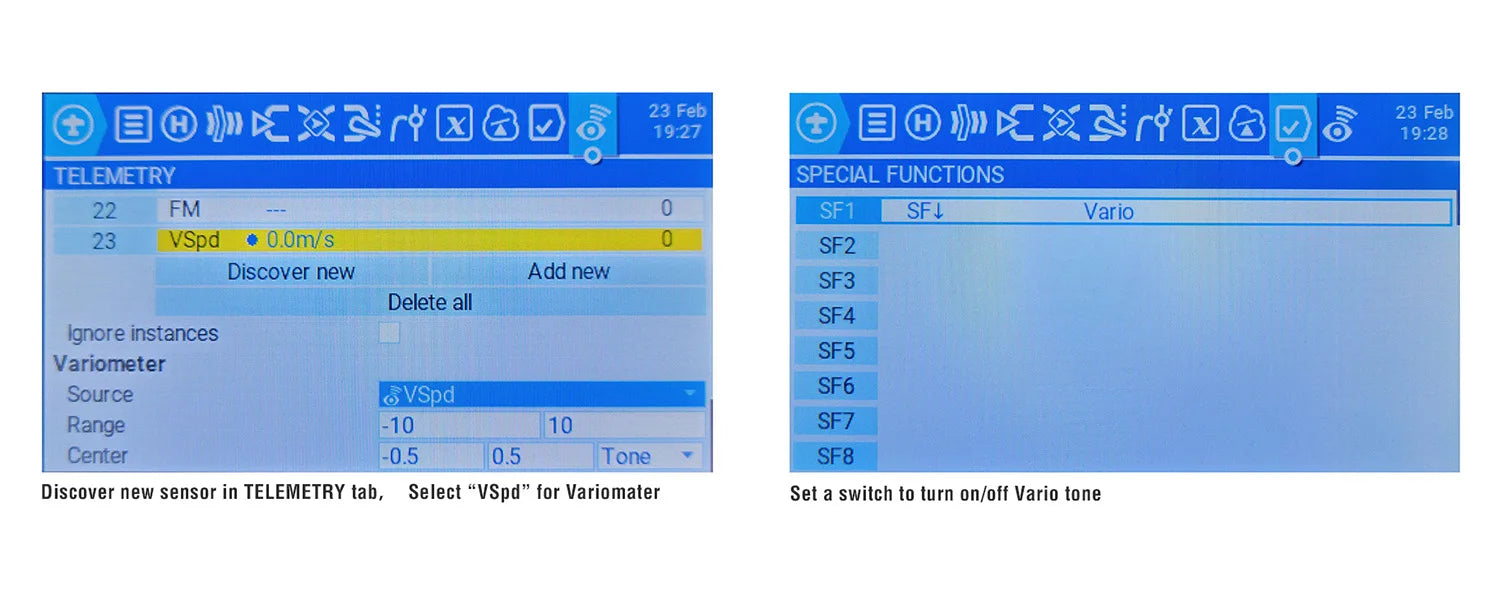
Den inbyggda barometern ger vertikal hastighetstelemetri. Variometern låter både stigande och fallande toner, så att du vet om du är i hiss eller sjunker utan att behöva titta på din sändare.
-
med ExpressLRS firmware och CRSF-protokoll ger detta dig även annan telemetridata som batterispänning, ström och GPS-relaterad.
Specifikationer
-
ESP8285, SX1281, ExpressLRS Firmware
-
RF-frekvens: 2,4GHz ISM (2400~2480MHz)
-
Antennkontakt: IPEX MHF-1
-
Telemetrieffekt: 12dbm
-
CRSF-PWM-V-omvandlare med inbyggd barometer
-
7x PWM-utgångar (6x med power rails, PWM8 är bara en signalplatta)
-
PWM-frekvens: 50, 100, 160, 330, 400Hz konfigurerbar
-
PWM-upplösning: 4x 1024 positioner + 3x 128 positioner (ExpressLRS 2.0 Wide switch-läge)
-
1x UART(2) för GPS
-
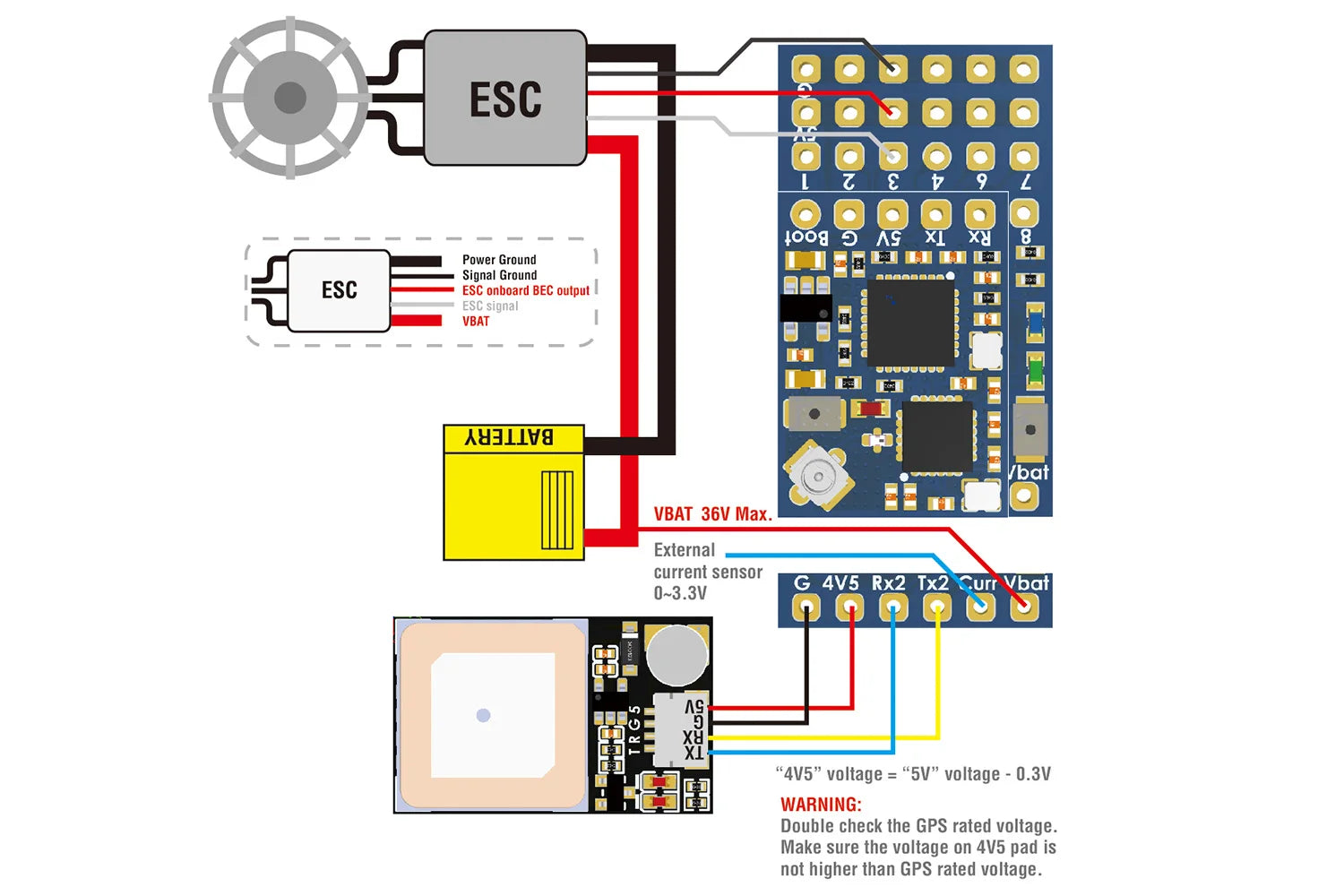
36V Max. batterispänningsavkänning (1K:10K spänningsdelare inbyggd)
-
Kompatibel med extern strömsensor (0~3,3V)
-
RxBt,Curr,Capa,Bat%,GPS-telemetri och VSPD(Vario)
-
Märkspänning: 3,5~9V @5V pad, 0~36V @Vbat, 0~3,3V @Curr
-
Strömförlust: 50mA(bindning), 90mA(wifi-läge)
-
Ingen 5V-regulator inbyggd, servon måste matas via 5V-plattan på CRSF-PWM-V-kortet av extern 5V-källa.
-
Filsäkert värde konfigurerbart
-
Firmware-uppgraderingsbar
-
Fysisk:
-
Skrivkortsstorlek: 27x16mm,
-
Vikt: 5 g med antenn och 2,54 stift
-
-
Förpackning:
-
1x ELRS-R24-V (inkluderar CRSF-PWM-V och 2,4G-mottagare)
-
1x IPEX MHF1-antenn
-
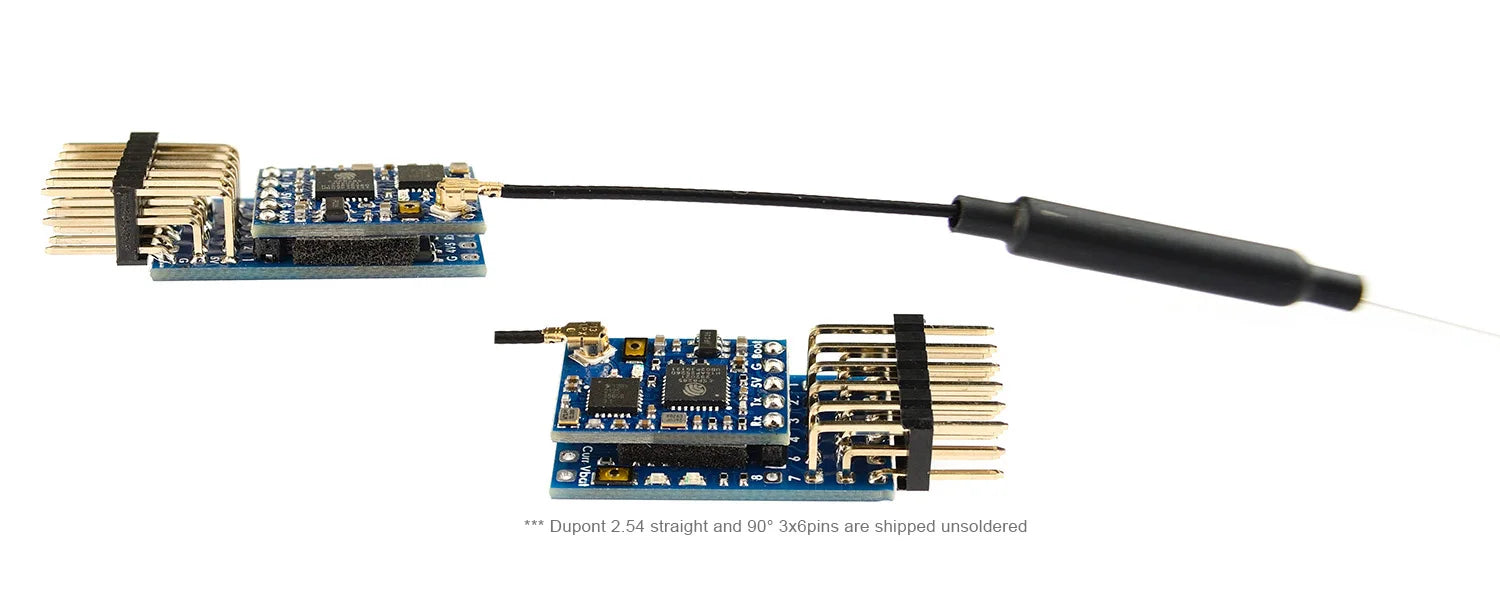
2,54 mm rak och 90° 3×6 Dupont-stift
-
Firmware
-
2.4GHz-mottagare: ExpressLRS /DIY_2400_RX_ESP8285_SX1280, V2.0 eller nyare
-
CRSF-PWM-V: crsf_pwm_v2.0 eller nyare
Pinouts och kuddar
-
Tx1/Rx1(UART1) för mottagare integrerad
-
Tx2/Rx2(UART2) för GPS/firmwareuppdatering/inställning av parametrar
-
1~8: CH1~CH8 PWM-utgångar
-
Ström: strömsensorsignal (0~3,3V)
-
Vbat: 0~36V Batterispänningsavkänning
-
G: mark
-
4v5 pad spänning = 5V pad spänning -0,3V.
-
ingen 5V-regulator inbyggd, behöver strömsättas på kortet och mottagaren via extern 5V-källa
Failsafe (FW 2.0.0 eller nyare)
-
CH3 är anordnad för gasreglaget, Feilsäkert värde = 988 som standard. du kan ändra felsäkert värde för CH3 och andra kanaler genom att följa inställningarna.
-
Se till att ESC-signalen är bortkopplad från CRSF-PWM-kortet innan du startar felsäkra inställningar
-
Bryga PWM1- och PWM2-signalplattan, slå sedan på CRSF-PWM-kortet och mottagaren.
-
Feilsäkert värde kommer att sparas automatiskt efter att CRSF-PWM-kortet slås på och tar emot CRSF-signal. LED blinkar 8 gånger snabbt.
-
Feilsäkert värde = PWM-värdet för varje sändarkanal när CRSF-signal tas emot av CRSF-PWM-kortet.
-
Ta bort bygeln mellan PWM 1 och 2 så kommer CRSF-PWM-kortet att fungera i normalt PWM-utgångsläge.
LED-status
-
blinkar långsamt: CRSF-PWM-kort tar inte emot CRSF-signal, t.ex. mottagaren är inte bunden till sändaren.
-
fast PÅ: CRSF-PWM-kort och mottagare fungerar normalt
-
5x snabba blinkningar efter att ha slagits på i 10 sekunder: CLI-läget är aktivt
GPS-telemetri
-
Kompatibel med GPS NMEA-protokoll, 1Hz, Baud 9600~115200
-
GPS "TX" till CRSF-PWM-kort "RX" Enkeltråds halvduplex UART-anslutning, CRSF-PWM-kort "TX" till GPS "RX" är inte nödvändigt.
-
Stöd för GPS-telemetri-ID: GPS, GSpd, Hdg, Alt, Sats
-
u-blox-serien GPS kan mata ut "0+1 – UBX+NMEA"-protokoll som standard
-
Sensorer (GPS, GSpd, Hdg, Alt, Sats) blinkar på fliken Sändarens TELEMETRY när CRSF-PWM-kortet har anslutning till GPS.
-
Felsökning för ingen GPS-telemetri, dubbelkolla kablarna mellan GPS och CRSF-PWM-kort, vissa u-blox GPS kanske inte matar ut NMEA-protokoll, du måste återställa GPS till standardkonfigurationen i u-center.
-
med OpenTX Telemetry Logging, kan du rita din flygväg eller söka efter det förlorade planet.
VSpd-telemetri
-
Barometer SPL06-001 (I2C-adress 0x76) integrerad
-
VSpd-telemetri stöds av ExpressLRS 2.0, EDGE 2.6, OPENTX 2.2 eller senare.
TIM- och PWM-frekvens
-
PWM-frekvens på alla 10x-kanaler kan konfigureras enligt TIM
-
PWM körs vid 50Hz som standard
-
TIM2: CH1, CH2, CH4
-
TIM16: CH3
-
TIM3: CH5, CH6, CH7, CH8
CLI-läge
-
Om CRSF-PWM-kortet inte upptäcker GPS ansluten till UART2 inom 10 sekunder efter påslagning, aktiveras CLI-läget.
-
När CLI-läget är aktivt kan CRSF-PWM-kortet anslutas till konfiguratorn via USB-TTL-modul/FC-genomföring.
-
i CLI-läge kan firmware för CRSF-PWM-kort uppdateras
-
CLI-läge har ingen effekt på mottagarens CRSF-signal och PWM-utgångar
Firmware
-
Visa gärna CRSF TO PWM CONVERTER sida för firmwareuppdatering av CRSF-PWM-V-kort
-
Verktyg: Matek Configurator
-
via A eller B
FÖR MER
Related Collections


