


MATEKSYS H7A3-SLIM Flygkontroller - ICM42688P - 30x30
MATEKSYS H7A3-SLIM Flygkontroller - ICM42688P - 30x30
MATEKSYS
Det gick inte att ladda hämtningstillgänglighet
Den MATEKSYS H7A3-SLIM Flygkontroller erbjuder hög prestanda i en kompakt design på 30x30mm. Den har STM32H7A3RIT6 MCU, 280MHz Cortex-M7 processor, 1.4MB RAM och 2MB Flash. Med ICM42688P IMU, SPL06-001 barometer, AT7456E OSD och 128MB Flash Blackbox, ger den exakt data och gott om loggning. Kontrollen inkluderar 6 UARTs, 11 PWM-utgångar, 1 I2C, 1 CAN-port och 4 ADC-kanaler. Den har också tre status-LED-lampor, en USB Type-C-port och en växlad 9V-utgång. Med ett monteringsmönster på 30.5 x 30.5mm, 4mm hål, 3mm grommets och en vikt på endast 7g, är den perfekt för FPV-racing och freestyle-flygning. En 3D step-fil ingår för anpassad integration.
Funktioner
- Skärmvisning
- 30x30 Montering
- Kompakt Design
- Anslutning
- Lättviktig
Specifikationer
Specifikationer
- MCU: STM32H7A3RIT6, 280MHz Cortex-M7, 1.4MB RAM, 2MB Flash
- IMU: ICM42688P
- Baro: SPL06-001
- OSD: AT7456E
- Blackbox: 128MB Flash (1G-bit NAND)
- 6x Uarts (1,2,3,4, 5, 6) med inbyggd inversion.
- 11x PWM-utgångar
- 1x I2C
- 1x CAN
- 4x ADC (VBAT, Ström, VB2, Cur2)
- 3x LED-lampor för FC STATUS (Blå, Röd) och 3.3V indikator (Röd)
- USB Typ-C (USB2.0)
- 8x PWM-utgångar på 2x JST-SH1.0_8pin-kontakt för 2x 4in1 ESC
- 1x JST-GH1.25_4pin-kontakt (5V/CAN-H/CAN-L/G)
- 9V utgång PÅ/AV växlar
- Digital video OSD stöds av vilken överbliven UART som helst
Ström
- Vbat-ingång: 6~36V (2~8S LiPo)
- BEC: 5V 2A kont. (Max.3A)
- BEC: 9V 2A kont. (Max.3A)
- LDO 3.3V: Max.200mA
- Ingen ström sensor inbyggd
- ADC VB2 pad stöder Max. 69V (spänningsdelare: 1K:20K)
FC Firmware
- ArduPilot: MATEKH7A3 (4.6 eller nyare)
- ArduPlane https://firmware.ardupilot.org/Plane/beta/MatekH7A3/
- ArduCopter &https://firmware.ardupilot.org/Copter/beta/MatekH7A3/
- Flashning med STM32CubeProgrammer
Fysisk
- Montering: 30,5 x 30,5 mm, Φ4 mm med grommets Φ3 mm
- Dimensioner: 36 x 36 x 5 mm
- Vikt: 7 g
- 3D steg H7A3-SLIM_step.zip
Inkluderar
- 1x H7A3-SLIM
- 6x silikon grommets M4 till M3
- 2x JST-SH1.0_8pin kabel, 5cm, & 8pin kontakter
- 1x JST-GH-4P till JST-GH-4P kabel för CAN-port, 20cm
Detaljer

MATEKSYS H7A3-SLIM flygkontroller använder en STM32H7A3 MCU med ICM42688P IMU och en USB-C-port i ett 30,5 mm monteringsmönster.

MATEKSYS H7A3-SLIM flygkontroller använder en kompakt 30x30 layout med en USB-C-port och tydligt märkta pads för prydlig kablage.

MATEKSYS H7A3-SLIM använder dubbla JST-SH 1.0 8-pin kontakter plus en JST-GH 4-pin port och USB Typ-C för prydlig kablage och enkel installation.

MATEKSYS H7A3-SLIM använder tydligt märkta lödpads och portar för kamera/VTx video, UARTs, CAN och strömanslutningar.
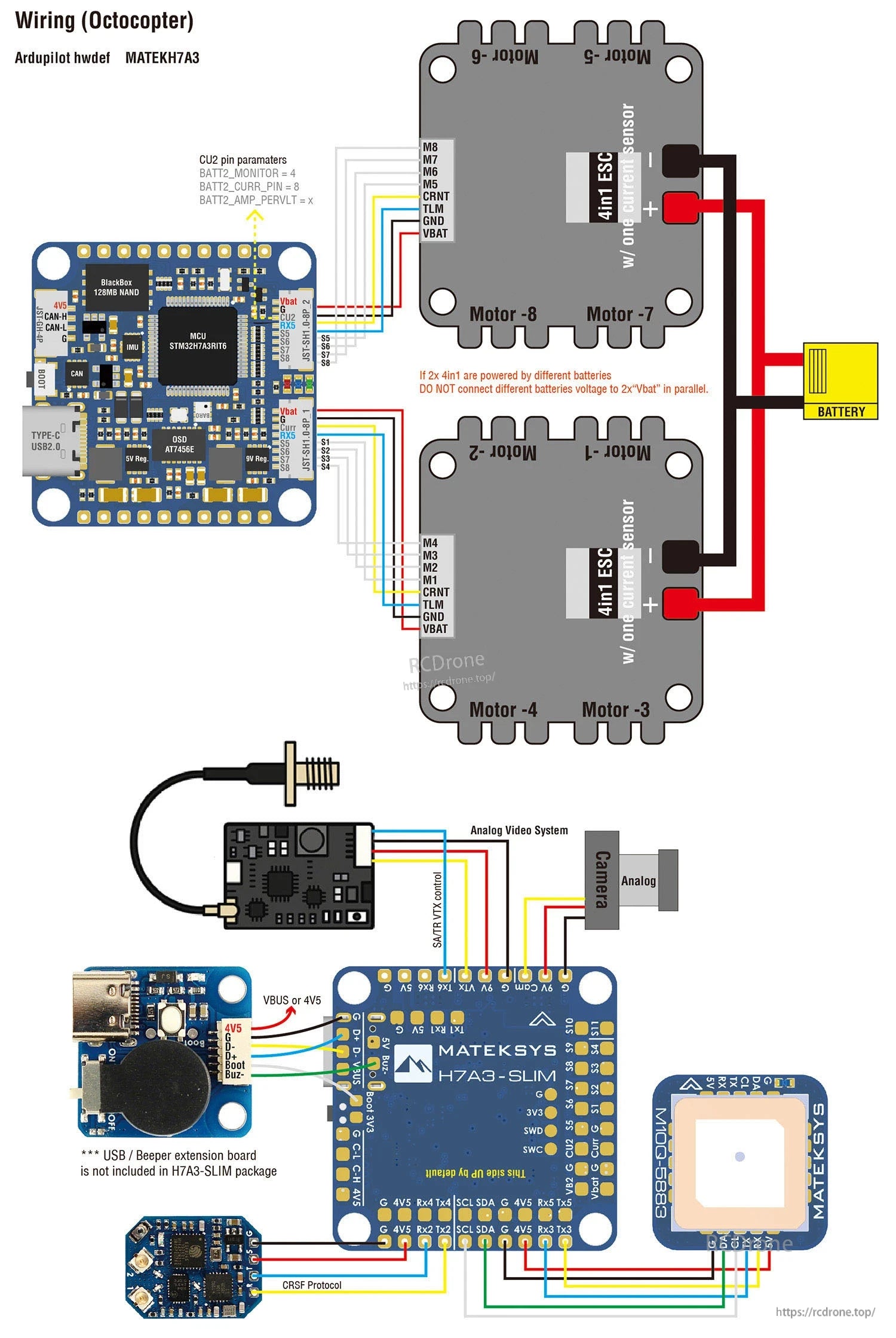
MATEKSYS H7A3-SLIM använder tydligt märkta pads för att ansluta dubbla 4-i-1 ESC:er, VBAT-ström, GPS, mottagare och analoga videokomponenter.

ArduPilot kartläggning
| ArduPilot | ||||||
| PWM | S1 | PWM1 GPIO50 | 5 V tolerant I/O | TIM1_CH2 | DMA/Bi-DShot | Grupp1 |
| S2 | PWM2 GPIO51 | 5 V tolerant I/O | TIM1_CH3 | DMA/Bi-DShot | ||
| S3 | PWM3 GPIO52 | 5 V tolerant I/O | TIM2_CH1 | DMA/Bi-DShot | Grupp2 | |
| S4 | PWM4 GPIO53 | 5 V tolerant I/O | TIM2_CH2 | DMA/Bi-DShot | ||
| S5 | PWM5 GPIO54 | 5 V tolerant I/O | TIM3_CH3 | DMA/Bi-DShot | Grupp3 | |
| S6 | PWM6 GPIO55 | 5 V tolerant I/O | TIM3_CH4 | DMA/Bi-DShot | ||
| S7 | PWM7 GPIO56 | 5 V tolerant I/O | TIM3_CH1 | DMA/Bi-DShot | ||
| S8 | PWM8 GPIO57 | 5 V tolerant I/O | TIM3_CH2 | DMA/Bi-DShot | ||
| S9 | PWM9 GPIO58 | 5 V tolerant I/O | TIM4_CH1 | DMA/DShot | Grupp4 | |
| S10 | PWM10 GPIO59 | 5 V tolerant I/O | TIM4_CH2 | DMA/DShot | ||
| S11 | PWM11 GPIO60 | 5 V tolerant I/O | TIM16_CH1 | DMA/DShot | Grupp5 | |
| PWM1~PWM11 är Dshot och PWM kapabel.Men att blanda Dshot och normal PWM-operation för utgångar är begränsat till grupper, det vill säga att aktivera Dshot för en utgång i en grupp kräver att ALLA utgångar i den gruppen är konfigurerade och används som Dshot, snarare än PWM-utgångar. Om servo och motor blandas i samma grupp, se till att denna grupp kör den lägsta PWM-frekvensen enligt servospecifikationen. Det vill säga. Om servot stödjer Max. 50Hz, måste ESC köra på 50Hz i denna grupp. |
||||||
| PINIO | 9V switch | GPIO81 | RELAY1_PIN | 81 | ||
| ADC | Vbat pad | BATT_VOLTAGE_SENS | 6~36V | BATT_VOLT_PIN BATT_VOLT_MULT |
10 21.0 |
|
| Curr pad | BATT_CURRENT_SENS | 0~3.3V | BATT_CURR_PIN BATT_AMP_PERVLT |
11 X |
||
| VB2 Pad | BATT2_VOLTAGE_SENS | 0~69V | BATT2_VOLT_PIN BATT2_VOLT_MULT |
18 21.0 |
||
| CU2 Pad | BATT2_CURRENT_SENS | 0~3.3V | BATT2_CURR_PIN BATT2_AMP_PERVLT |
8 X |
||
| I2C | SCL/SDA | I2C3 | 5V tolerant I/O | på kortet Baro SPL06-001 | Adress | 0x76 |
| Digital luftfart I2C MS4525 DLVR-L10D |
ARSPD_BUS ARSPD_TYPE ARSPD_TYPE |
0 1 9 |
||||
| Magnetometer | COMPASS_AUTODEC | 1 | ||||
| CAN | C-H/C-L | CAN2 | 5V tolerant I/O | CAN | CAN_D1_PROTOCOL CAN_P1_DRIVER |
1 1 |
KAN GPS KAN Kompass KAN Luftfartssensor |
GPS_TYP KOMPASS_TYPMASK ARSPD_TYP |
9 0 8 |
| UART | USB | USB | konsol | SERIEL0_PROTOKOLL | 2 | |
| TX1 RX1 | USART1 m/DMA | 5 V tolerant I/O | Telemetri | SERIEL1_PROTOKOLL | 2 | |
| TX2 RX2 | USART2 m/DMA | 5 V tolerant I/O | RC-ingång/Mottagare | SERIEL2_PROTOKOLL | 23 | |
| TX3 RX3 | USART3 m/DMA | 5 V tolerant I/O | GPS | SERIAL3_PROTOCOL | 5 | |
| TX4 RX4 | UART4 utan DMA | 5 V tolerant I/O | Reservdel | SERIAL4_PROTOCOL | -1 | |
| TX5 RX5 | UART5 utan DMA | 5 V tolerant I/O | Reservdel | SERIAL5_PROTOCOL | -1 | |
| TX6 RX6 | USART6 utan DMA | 5 V tolerant I/O | Reservdel | SERIAL6_PROTOCOL | -1 | |
RC INMATNING
RC-inmatning är konfigurerad på USART2(SERIAL2).Det stöder alla seriella RC-protokoll. SERIAL2_PROTOCOL=23 som standard.
- PPM stöds inte.
- CRSF kräver Tx2 & Rx2-anslutning, och ställ in SERIAL2_OPTIONS till “0” (standard).
- SBUS/DSM/SRXL ansluts till Rx2-stiftet, men SBUS kräver att SERIAL2_OPTIONS ställs in på “3”.
- FPort kräver anslutning till Tx2, och ställ in SERIAL2_OPTIONS till “7”. Om Telemetri inte fungerar, försök ställ in SERIAL7_OPTIONS = 135.
- SRXL2 kräver en anslutning till Tx2 och tillhandahåller automatiskt telemetri. Ställ in SERIAL2_OPTIONS till “4”.
- Valfri UART kan också användas för RC-systemanslutningar i ArduPilot och är kompatibel med alla protokoll utom PPM. Se Radio Control Systems för detaljer.
ArduPilot Relay(PINIO)
- 9V utgång PÅ som standard
- PC13 PINIO1 UTGÅNG GPIO(81) //9V ström switche.g.
- RELAY1_FUNKTION 1
- RELAY1_PIN 81 // PINIO1 GPIO
- RC7_ALTERNATIV 28 //Relä På/Av, Använd CH7 av Sändaren för att ställa in 9V PÅ/AV
Den konfigurerade funktionen kommer att aktiveras när den auxiliary switchens pwm-värde blir högre än 1800. Den kommer att avaktiveras när värdet faller under 1200.
Kontrollera pwm-värdet som skickas från sändaren när switchen är hög och låg med hjälp av Mission Planner’s Initial Setup >> Obligatorisk hårdvara >> Radio kalibreringsskärm.Om det inte klättrar högre än 1800 eller lägre än 1200, är det bäst att justera servots slutpunkter i sändaren.
Related Collections


