







Mayatech 1258TG V3 20KG Servo - Vattentät och högt vridmoment metalltandställdon Digital styrväxel servoburk till parabolisk 1268SG
Mayatech 1258TG V3 20KG Servo - Vattentät och högt vridmoment metalltandställdon Digital styrväxel servoburk till parabolisk 1268SG
Mayatech
Det gick inte att ladda hämtningstillgänglighet
Mayatech 1258TG V3 Servo SPECIFIKATIONER
Varumärke: Mayatech
Ursprung: Kina
Material: Kompositmaterial
Rekommendera ålder: 12+y
RC-delar och tillbehör: Servon
För fordonstyp: Flygplan
Använd: Fordon och fjärrkontrollleksaker
Fjärrkontroll Kringutrustning/enheter: Servon
Verktygstillbehör: Verktyg
Mängd: 1 st
Modellnummer: 1258TG 1268SG

Mayatech 1258TG V3 vattentät servo: Uppgradera från V2 till V3, med förbättrad hårdvara och en gummidistans för ökad vattenbeständighet. Med ständiga uppdateringar och tester har denna servo förstärkts med bättre material och förbättrad yttillämpbarhet.

Mayatech 1258TG V3 digital servo, vattentät och högt vridmoment metalltandställdon, kompatibel med parabolisk styrväxel servo modell 1268SG.

Mayatech 1258TG V3 Servo, vattentät metalltandställdon med högt vridmoment, digital styrväxel för parabolisk rörelsekontroll, kompatibel med Mayatechs 1268SG.
Metalltänder med stort vridmoment
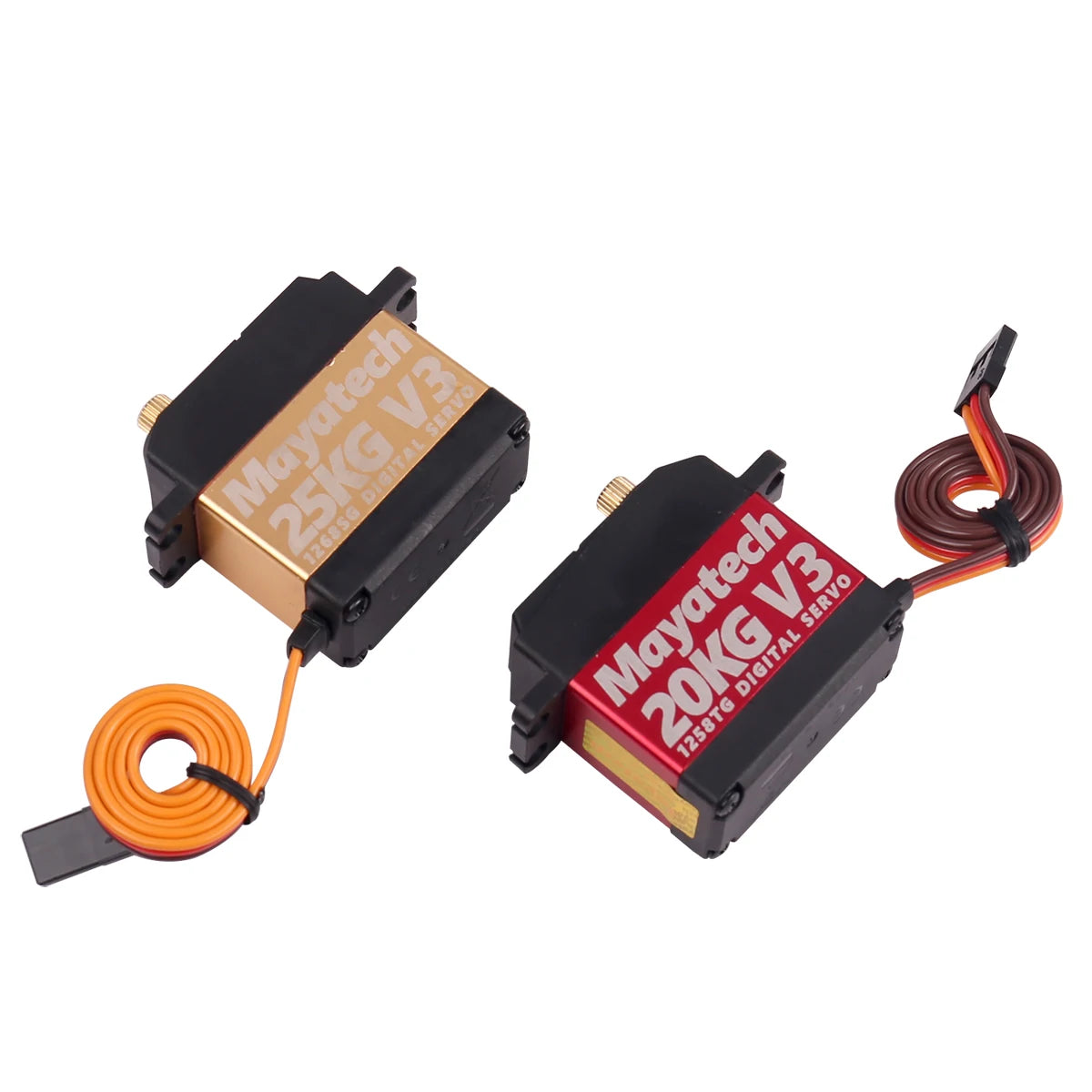
Mayatech 1258TG V3 Servo
20 kg / 25 kg stort vridmoment, alla metallkoppartänder, dubbellager, hög precision, lågt ljud, stor vinkel, stabil prestanda

Mayatechs V3-servo har en digital styrväxel och vattentät design, med ett högt vridmoment av metalltandställdon som är lämpligt för parabolsystem.
Importerat chip
Snabb respons, ingen roderskakning, snabb utgång, digitalt läge, snabb tråkig hastighet, säkert och stabilt, så att du kan spela dina stunts fritt

Mayatech 1258TG V3 Digital Servo, vattentät, högvridande metalltandställdon, lämplig för parabolsystem och kompatibel med Mayatechs 1268SG styrväxel.
IP86 Vattentät
Alla hål är utrustade med vattentäta packningar, så att du kan vada utan oro (Det kan förhindra stänk och kan inte sänkas ner i vatten under lång tid)

Mayatechs vattentäta servo har tre tätande gummiringar, testade enligt IP86-standarder, vilket säkerställer pålitlig prestanda även i våta förhållanden.
Mellersta skal av metall
CNC-aluminiumlegering mellanskal, hög hållfasthet, korrosionsbeständighet och hållbarhet

Mayatech 1258TG V3 vattentät digital styrväxelservo med högt vridmoment och metalltandställdon, kompatibel med parabolisk 1268SG.
Silikonstyrväxellinje
JR-kontakt, stark anpassningsförmåga, korrosionsbeständig silikontråd, 265 mm trådlängd

Tillbehör: roderarm komplett
Inklusive styrväxeltillbehörspaket, rak, halv, kors, * typ, skiva och tillhörande skruvar

Storleksintroduktion

Mayatechs 1258TG V3 servo har en vattentät design, högt vridmoment av metalltandställdon och digital styrväxel för användning med parabolsystem som 1268SG.

Mayatechs 1258TG V3 servo har vattentät design, 20 kg metalltandställdon och högt vridmoment. Med en vikt på 68g och 2BB-lager är denna digitala styrväxelservo lämplig för parabolsystem som 1268SG.
Vinkelområde: faktisk vinkel 120 ± 2 °, cirka 60 grader
Kugghjul: titanståltänder
Hastighet (4,8V): 0,13 sek / 60 °
Hastighet (6V): 0,11 sek / 60 °
Vridmoment (4,8V): 17,25 kg cm (239,55 oz/tum)
Vridmoment (6V): 20,32 kg cm (281,89 oz/tum)
Storlek: 40,5x20,2x38mm / (standardstorlek)
Vikt: 65 g (2,18 oz)
Anslutningskabel: JR-kontakt (Futaba universal) 265 mm (10,43 tum)
Lager: 2BB kuggledsdel är försedd med lager och driften är smidig utan att klämma
Utgångstand: 25T (Futaba allmänt)
Inklusive styrväxeltillbehörspaket, rak, halv, kors, * typ, skiva och tillhörande skruvar
Total vikt av metallpaket: 139g
Obs:pulsbreddsområde: 500 μ s-2500 μ S (lämplig för fjärrkontroll och mikrokontrollerkontroll) dödzon: 2 μ s>

Mayatechs 1268SG V3 servo har vattentät design, högt vridmoment på metalltandställdon och digital styrväxel. Den har en vikt på 68g, vridning på 25KG och en bäring på 2BB. Utgående tandräkning är 25T (Futaba-valuta) med pulsintervall på 500-2500us.
Vinkelområde: faktisk vinkel 120 ± 2 °, cirka 60 grader
Kugghjul: metallkoppartänder
Hastighet (4,8V): 0,13 sek / 60 °
Hastighet (6V): 0,11 sek / 60 °
Vridmoment (4,8V): 19,9 kg cm (239,55 oz/tum)
Vridmoment (6V): 25,32 kg cm (281,89 oz/tum)
Storlek: 40,5x20,2x38mm / (standardstorlek)
Vikt: 68g (2,18 oz)
Anslutningskabel: JR-kontakt (Futaba universal) 265 mm (10.43 tum)
Lager: 2BB kuggledsdel är försedd med lager, och driften är smidig utan att klämma
Utgångstand: 25t (Futaba allmänt)
Inklusive styrväxeltillbehörspaket, rak, halv, kors, * typ, skiva och tillhörande skruvar
Total vikt av metallpaket: 139g
Obs:pulsbreddsområde: 500 μ s-2500 μ S (lämplig för fjärrkontroll och mikrokontrollerkontroll) dödzon: 2 μ s>
Produktvisning:

Mayatech 1258TG V3 digital servo har vattentät och högt vridmoment metalltandställdon, kompatibel med paraboliska växelsystem.

Mayatechs 1258TG V3 Digital Steering Gear Servo har högt vridmoment och vattentät design, vilket gör den lämplig för olika applikationer inklusive parabolsystem. Servot har en metalltandställdon och kan användas som ersättning eller uppgradering för 1268SG-modellen.



MayaTech 1258TG V3 digital servo har vattentät design, högt vridmoment för metall- och tandväxel exakt kontroll. Kompatibel med parabolsystem som 1268SG.

Mayatechs vattentäta digitala servo, modell 1258TG-V3, har en metalltandställdon med högt vridmoment och digital styrväxel, lämplig för paraboliska applikationer.

Metallförpackning:

Mayatechs 20KG V3 1258TG digital servo har vattentät och högt vridmoment metalltandställdon, idealisk för paraboliska applikationer.

Mayatech 1258TG V3 20KG Servo - Vattentät och högt vridmoment metalltandställdon Digital styrväxelservo för paraboliska applikationer.

Mayatechs 20KG VB digitala servo med högt vridmoment och vattentät design, lämplig för parabolsystem.

Mayatechs 1258TG V3 servo är en vattentät digital styrväxel med högt vridmoment, med ett manöverdon i metall för exakt kontroll. Kompatibel med parabolsystemet 1268SG.

Mayatech 1258TG V3 vattentät digital styrväxelservo, metalltandställdon med högt vridmoment, kompatibel med Mayatech 1268SG och andra modeller.
Snabb reaktionshastighet och stort vridmoment, kan appliceras på helikoptrar, fasta vingar, fordons- och fartygsmodeller och robotar. Det är en allround styrväxel som rekommenderas allmänt av modellvänner!

Universell passform för modellbilar, klätterbilar, lastbilar och mer.

Digital styrväxelservo med högt vridmoment och vattentätt manöverdon i metall, lämplig för elektriska helikoptrar, modellflygplan och fartyg, med robust design och pålitlig prestanda.
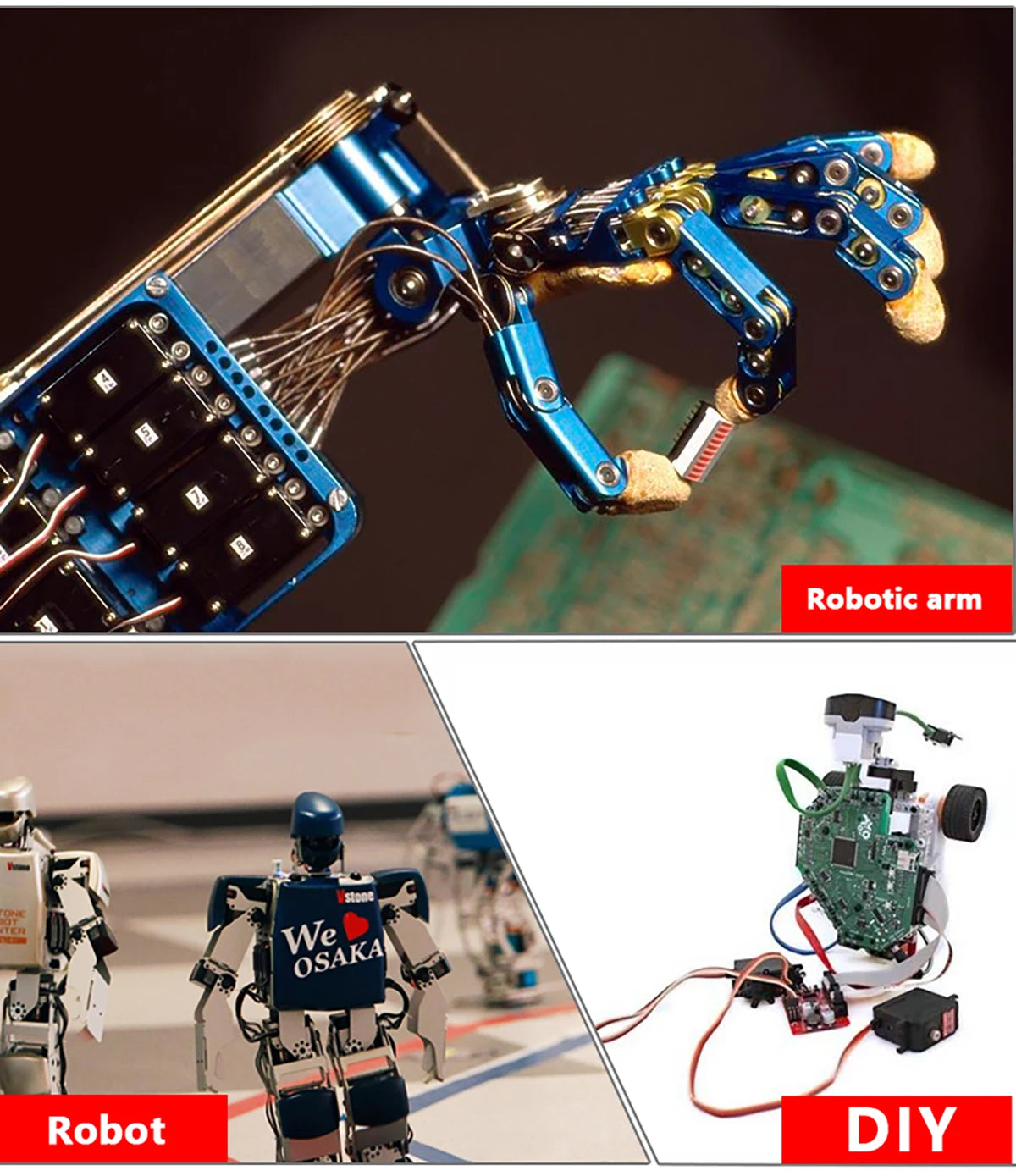
Mayatechs 1258TG V3 servo har en vattentät design, högt vridmoment i metalltandställdon och digital styrväxel för exakt robotarmkontroll.

Skillnaden mellan digital (digital) styrväxel och analog styrväxel
Digital servo och analog servo är identisk i grundläggande mekanisk struktur, huvudsakligen sammansatt av motor, reduktionsväxel och styrkrets. Den största skillnaden mellan digital servo och analog servo återspeglas i styrkretsen. Styrkretsen för digital servo är mer mikroprocessor och kristalloscillator än analog servo.Underskatta inte denna förändring, den har en avgörande inverkan på att förbättra prestandan hos styrväxeln.
Digital styrväxel skiljer sig från analog styrväxel på följande två punkter:
Sättet att bearbeta mottagarens insignal;
Sättet att styra den initiala strömmen för styrväxelmotorn minskar icke-reaktionsområdet (kontrollområdet som inte svarar på små mängder signaler), ökar upplösningen och genererar en större fast kraft.
När den simulerade styrväxeln är obelastad överförs ingen kraft till styrväxelns motor. När det finns en signalingång för att flytta styrväxeln, eller när styrväxelns vipparm tar emot en extern kraft, kommer styrväxeln att reagera och överföra kraft (spänning) till styrväxelns motor. Denna effekt sänds faktiskt 50 gånger per sekund, moduleras till den maximala spänningen för på/av-pulsen och genererar små kraftsegment. När bredden på varje puls ökas, till exempel, kommer effektiviteten hos den elektroniska transmissionen att visas tills maximal effekt/spänning överförs till motorn, och motorn roterar för att peka styrväxelns vipparm till ett nytt läge. Sedan, när styrväxelns potentiometer säger till den elektroniska delen att den har nått det specificerade läget, kommer kraftpulsen att minska pulsbredden och sakta ner motorn. Tills det inte finns någon effekt, stannar motorn helt.
"Nackdelen" med att simulera styrväxeln är att om man antar en kort kraftpuls följt av en lång paus, kan den inte applicera mycket excitation på motorn för att få den att rotera. Detta innebär att om det finns en liten kontrollåtgärd kommer styrväxeln att skicka en liten initial puls till motorn, vilket är mycket ineffektivt. Det är också därför det finns en "ingen reaktionszon" i den simulerade styrväxeln. Till exempel är styrväxeln väldigt långsam att reagera på sändarens små rörelser, eller så finns det inget svar alls.
Jämfört med den traditionella analoga styrväxeln har den digitala styrväxeln två fördelar:
På grund av mikroprocessorn kan den digitala styrväxeln bearbeta insignalen enligt de inställda parametrarna innan kraftpulsen skickas till styrväxelns motor. Detta innebär att kraftpulsens bredd, det vill säga kraften hos magnetiseringsmotorn, kan justeras enligt mikroprocessorns programberäkning för att anpassa sig till olika funktionskrav och optimera styrväxelns prestanda.
Den digitala servo skickar effektpulser till motorn med en mycket högre frekvens. Det vill säga, jämfört med traditionella 50 pulser/sekund är det nu 300 pulser/sekund. Även om bredden på varje effektpuls reduceras på grund av den höga frekvensen, tar motorn emot fler excitationssignaler samtidigt och roterar snabbare. Detta innebär också att inte bara servomotorn reagerar på sändarens signal med en högre frekvens, utan även "ingen svarszon" blir mindre; Reaktionen blir snabbare; Snabbare och mjukare acceleration och retardation; Digital styrväxel ger högre noggrannhet och bättre fixerad kraft.
Related Collections










