

MUWEIDU K4030 Motor Servomotor 16V 750rpm 0,65N.m Max vridmoment 18bit Encoder RS485/CAN
MUWEIDU K4030 Motor Servomotor 16V 750rpm 0,65N.m Max vridmoment 18bit Encoder RS485/CAN
MUWEIDU
Det gick inte att ladda hämtningstillgänglighet
Översikt
MUWEIDU K4030 Motor är en K-serie medelhastighets till hög hastighet borstlös DC-motor (servomotor) med en integrerad elektrisk driftsdesign (inbyggd drivrutin och magnetisk encoder). Den stöder hastighets-/positionskontroll och kommunicerar via RS485 eller CAN, vilket gör den lämplig för kompakta robotiska och mekatroniska aktuatorer.
Nyckelfunktioner
- Högpresterande FOC servomotor
- Integrerad motor + drivrutinsdesign
- Inbyggd drivrutin och magnetisk encoder
- Encoderprecision uppgraderad från 14-bit till 18-bit
- Optimerat motorstoppmoment
- PWM-ingång stöds
- Ultra-hög standard produktdesign
- PC-baserad parameterjustering / testning / firmwareuppgradering tillgänglig
- Kompatibel med öppna utvecklingsplattformar inklusive PC, MCU, PLC, industriell dator och Raspberry Pi
- Flera kontrolllägen visas: Momentläge, Hastighetsläge, Multi-Turn Kontrolläge (med hastighetsbegränsning), Single-Turn Position + Riktningläge (med hastighetsbegränsning), Incremental Positionläge (med hastighetsbegränsning)
- Flerlagers skyddsmekanismer (programvaru-UI-funktionstext)
- Bromsfunktion reserverad (programvaru-UI-funktionstext)
Tillämpningar
- Humanoida robotar
- Robothänder
- Exoskelett
- Kvadrupedrobotar
- AGV-fordon
- ARU-robotar
- Inspektionsrobot
- Handhållen kamera
- LiDAR
- Gimbal/Pod
Specifikationer
| Modell | K4030 |
| Nominell spänning | 16V |
| Nominell ström | 2.2A |
| Spetskraft | 22W |
| Nominalt vridmoment | 0.25N.m |
| Spetsvridmoment | 0.65N.m |
| Nominal hastighet | 750rpm |
| Encoder | 18bit |
Rotormoment| 81gcm^2 |
|
| Övervakning av motortemperatur | JA |
| Kontrolllägen | Hastighet/Position |
| Kommunikationsprotokoll | RS485 eller CAN |
| Övergripande dimensioner | Phi39.6mm x 23mm |
| Vikt | 65g |
Gränssnitt / Pin-definition
Gränssnittsetiketter visas: ID SWITCH, CAN/RS485.
| Gränssnitt | Notera |
|---|---|
| B/L | RS485-B eller CAN-L |
| A/H | RS485-A eller CAN-H |
| V- | Negativ strömförsörjning |
| V- | Negativ strömförsörjning |
| V+ | Positiv strömförsörjning |
| V+ | Positiv strömförsörjning |
| T | UART Sändare |
| R | UART Mottagare |
| G | Signal GND |
Manualer
För vägledning om urval eller integrationssupport (RS485/CAN-kablar, inställning av kontrollläge eller dokumentationsfrågor), kontakta supporten på https://rcdrone.top/ eller e-posta [email protected].
Detaljer

En kompakt K-serie servomotor motor med integrerad driftelektronik för högpresterande vridmoment, hastighet och positionskontroll.
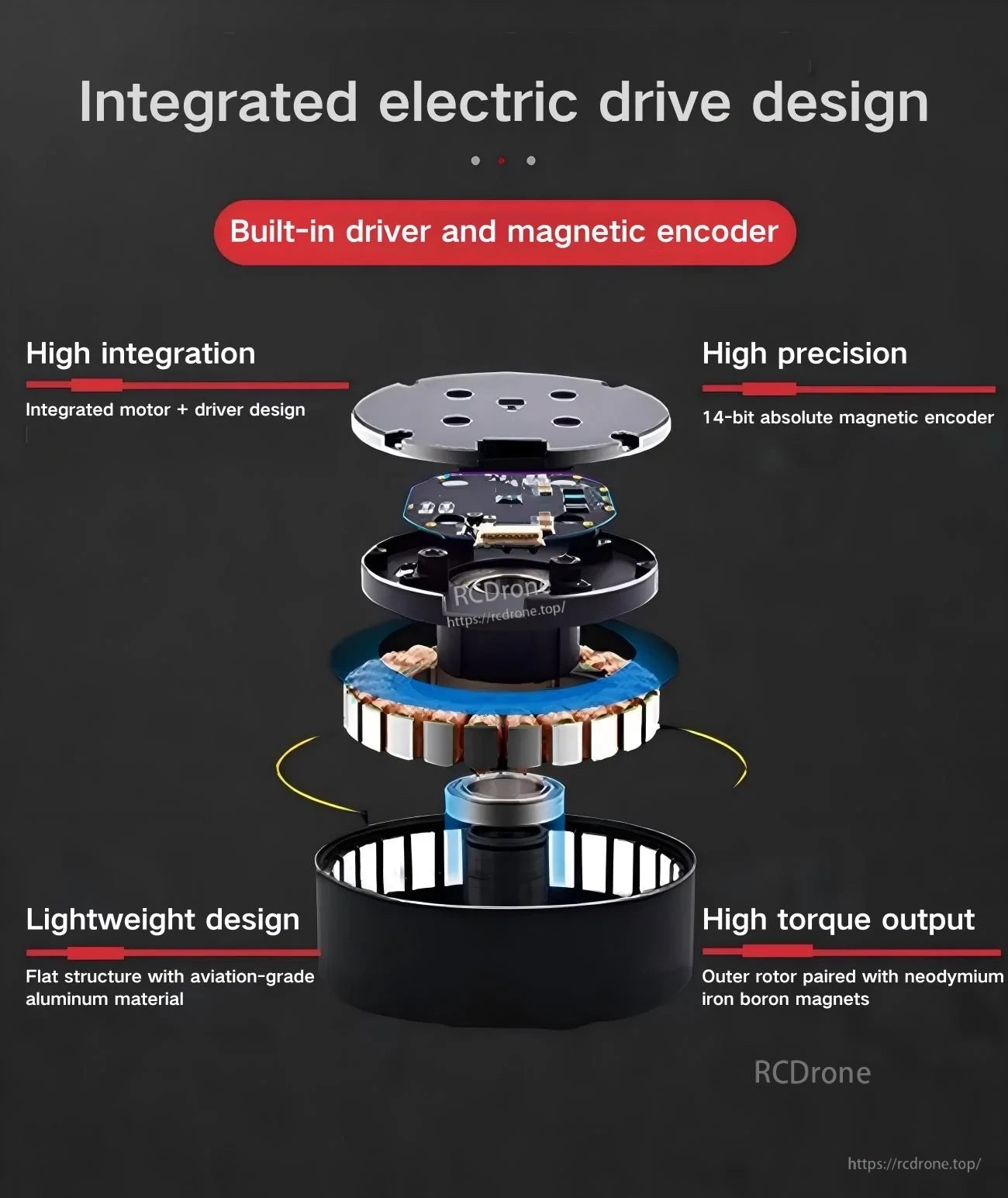
Integrerad motor, drivrutin och magnetisk encoder hjälper till att minska kablage och förenkla kompakta robotiska aktuator byggen.

Tydlig gränssnitts märkning gör det enklare att koppla ström och ställa in RS485 eller CAN kommunikation under integration.

PC-baserad justering och testning stöder flera kontrolllägen, med firmwareuppgradering och skyddsfunktioner tillgängliga i programvaran.
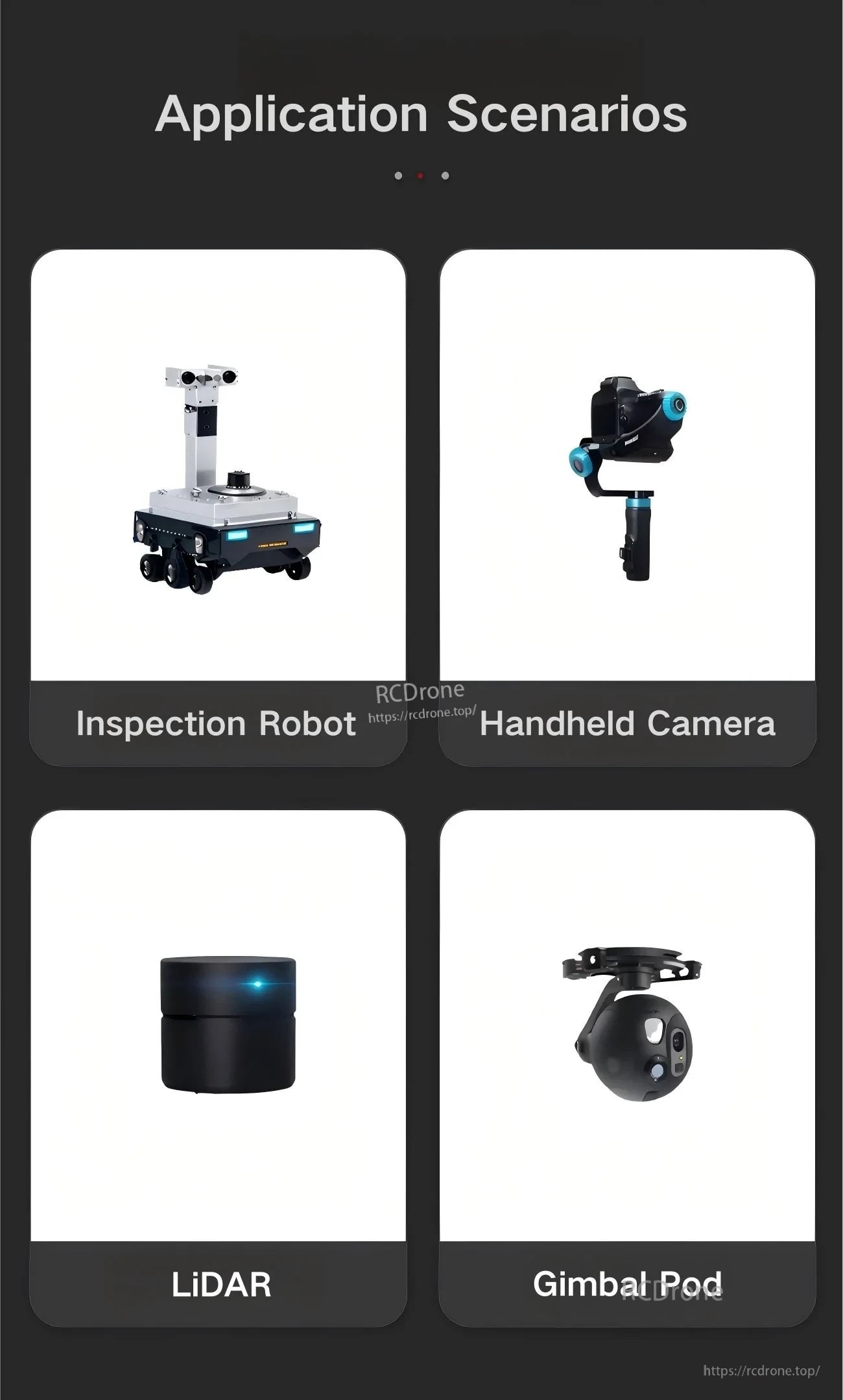
Lämplig för robotik och stabiliseringsprojekt såsom inspektionsplattformar, gimbals och sensorlaster.
Related Collections

