

MUWEIDU L4030 Borstlös DC-servomotor 16V 160rpm 0,25N.m RS485/CAN 15/18-bitars encoder
MUWEIDU L4030 Borstlös DC-servomotor 16V 160rpm 0,25N.m RS485/CAN 15/18-bitars encoder
MUWEIDU
Det gick inte att ladda hämtningstillgänglighet
Översikt
MUWEIDU L4030 Motor är en lågvarvs, högprecisions borstlös DC servomotor med integrerade elektriska driftsfunktioner för hastighets-/positionskontroll. Den stöder RS485 eller CAN-kommunikation och är utformad för kompakta, utrymmesbegränsade rörelseapplikationer som kräver stabil, jämn drift.
Nyckelfunktioner
- Seriepresentation: “Serie av låghastighets & högprecisions borstlösa DC-motorer”
- Mini servomotorer; design med hålaxel
- Stabil & jämn drift
- CE-certifierad
- Integrerad hög precision
- Lättviktskonstruktion; hög vridmomentprestanda
- Uppfyller kraven för låghastighets- och högprecisionspositionskontroll
- Högpresterande 32-bitars MCU möjliggör att MS-serien är helt kompatibel med alla kontrollkommandon från MF-serien
- Premium silikonstålplåtar och högtemperaturbeständiga högpresterande permanenta magneter används som kärnmaterial för motorer
- Yttre rotor flervägs platt design ger högre vridmoment för utrymmesbegränsade tillämpningar
- Borstlös struktur med högpresterande lager för smidigare rotation och längre livslängd
- Högprecisions, lågtemperaturdrift legeringsresistorer för noggrann strömavkänning och kontroll
- Full N-kanal tre-fas fullbrodrift med låg intern resistans och hög strömoutput
- Stöder sömlös växling mellan vridmoment öppen slinga, hastighet och positionskontroll lägen
- Engångskalibrering; “nollposition aldrig förlorad”
Tekniska specifikationer
| Modell | L4030 |
| Nominell spänning | 16V |
| Nominell ström | 1.1A |
| Spetskraft | 5.5W |
| Nominalt vridmoment | 0.25N.m |
| Spetsvridmoment | 0.35N.m |
| Nominal hastighet | 160rpm |
| Encoder | 15bit eller 18bit |
Rotormoment| 105gcm^2 |
|
| Övervakning av motortemperatur | JA |
| Kontrolllägen | Hastighet/Position |
| Kommunikationsprotokoll | RS485 eller CAN |
| Övergripande dimensioner | Phi39.6mm x 33mm |
| Vikt | 112g |
Gränssnittsdefinition
- ID SWITCH
- CAN/RS485
| Gränssnitt | Notera |
|---|---|
| B/L | RS485-B eller CAN-L |
| A/H | RS485-A eller CAN-H |
| V- | Negativ strömförsörjning |
| V- | Negativ strömförsörjning |
| V+ | Positiv strömförsörjning |
| V+ | Positiv strömförsörjning |
| T | UART Sändare |
| R | UART Mottagare |
| G | Signal GND |
Tillämpningsscenarier
- Humanoida robotar
- Robotarmar
- Exoskelett
- Kvadrupedrobotar
- AGV-fordon
- ARU-robotar
- 360-graders kamera
- Handhållen kamera
- LiDAR
- Gimbal
PC-programvara / Kontrollfunktioner (som angivet)
- PC-baserad parameterjustering / Testning / Firmwareuppgradering tillgänglig
- Kompatibel med öppna utvecklingsplattformar inklusive PC, MCU, PLC, industriell dator och Raspberry Pi
- Flera kontrolllägen: Momentläge; Hastighetsläge; Multi-Turn kontrolläge; Single-Turn position + riktning läge; Inkrementell positionsläge
- Med hastighetsbegränsningsalternativ för: Multi-Turn kontrolläge; Single-Turn position + riktning läge; Inkrementell positionsläge
- Flera skyddsmekanismer
- Bromsfunktion reserverad (Broms / Bromsfrisättning)
Dokument
För teknisk support, integrationsfrågor eller hjälp med dokumentation, kontakta [email protected] or besök https://rcdrone.top/.
Detaljer

Kompakt mini servo motorplattform designad för låg hastighet, hög precision i trånga utrymmen.

Integrerad driftelektronik stödjer stabil låg hastighet, hög precision positionskontroll med effektiva motormaterial och design.
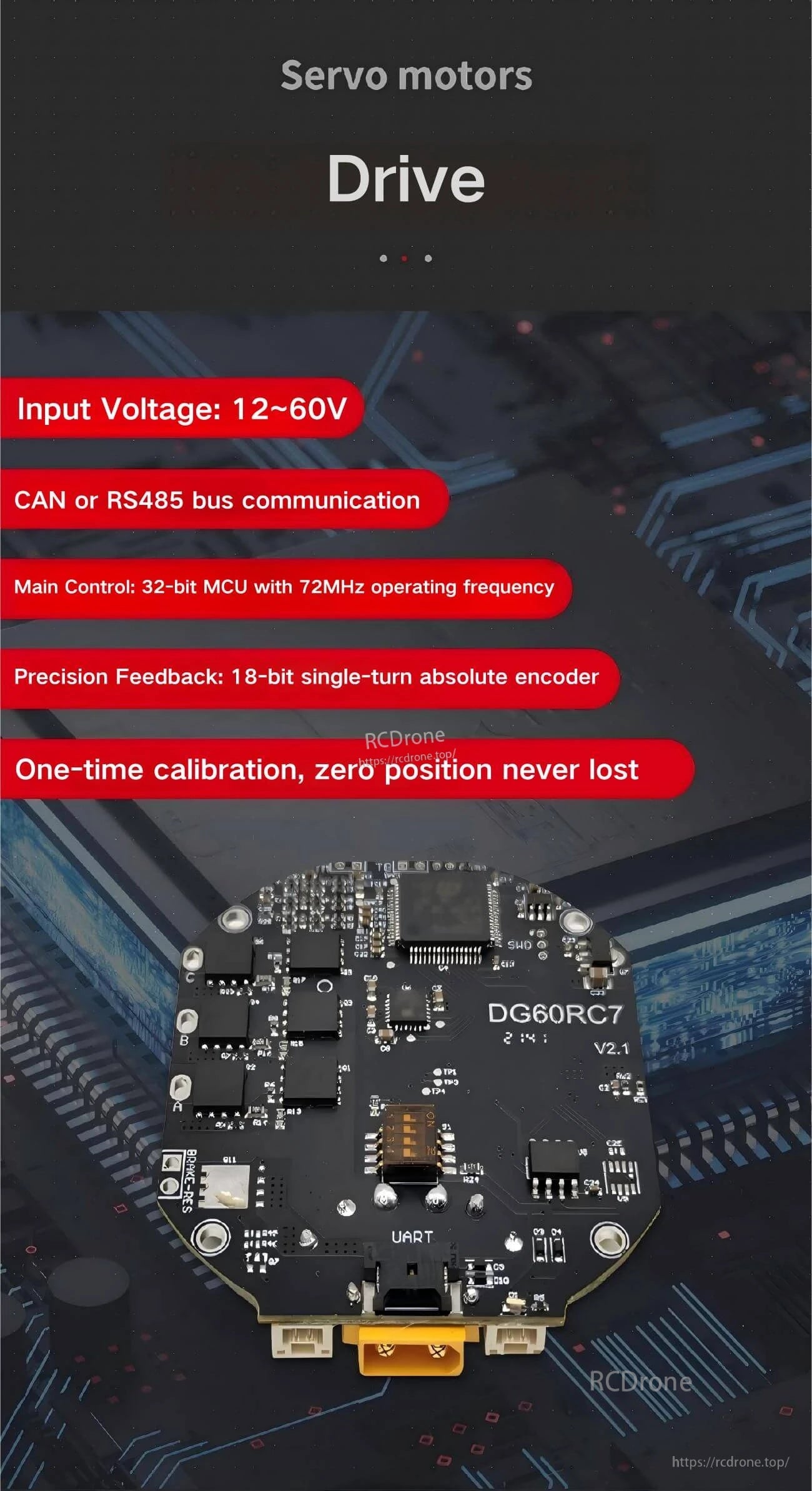
Välj CAN eller RS485 kommunikation och absolut encoder återkoppling för responsiv hastighet och positionskontroll.

Tydlig gränssnitts märkning förenklar kablage för ström, CAN/RS485-linjer och UART-signalanslutningar.
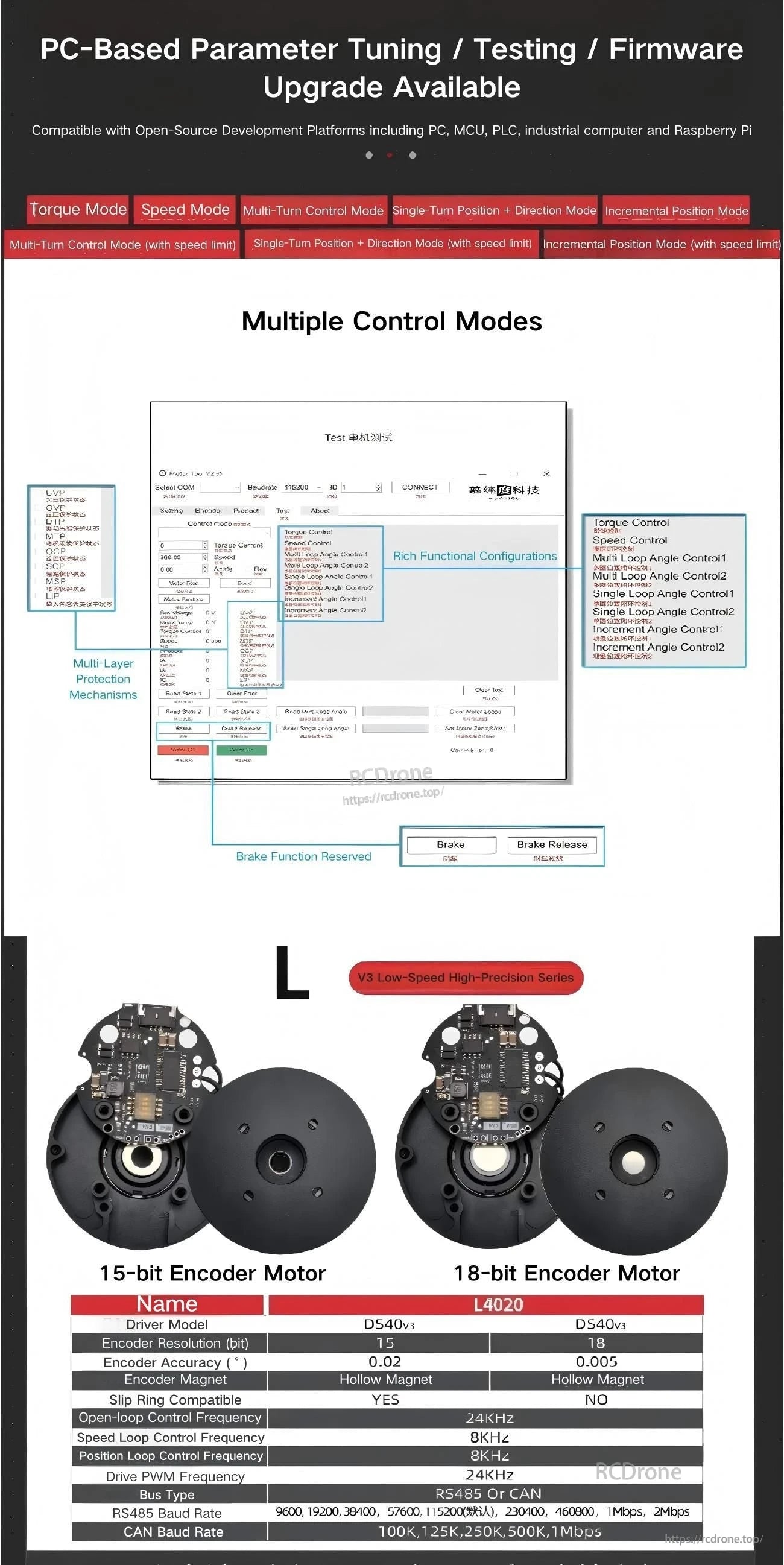
PC-verktyg möjliggör parameterjustering, testning och firmwareuppgraderingar över flera kontrolllägen och encoderkonfigurationer.

Related Collections

