

MUWEIDU L6020 Motor 24V 200rpm Servomotor med 18-bitars encoder, RS485/CAN, 0,58N.m märkt vridmoment
MUWEIDU L6020 Motor 24V 200rpm Servomotor med 18-bitars encoder, RS485/CAN, 0,58N.m märkt vridmoment
MUWEIDU
Det gick inte att ladda hämtningstillgänglighet
Översikt
MUWEIDU L6020 Motor är en lågvarvs, högprecisions borstlös DC servomotor designad för hastighets-/positionskontroll. Den integrerar en 18-bitars enkelvarvs absolutencoder och stöder CAN eller RS485 kommunikation för robotik och automationssystem som kräver stabil, mjuk drift. För produktval eller teknisk support, kontakta [email protected] or besök https://rcdrone.top/.
Nyckelfunktioner
- Låg hastighet & högprecisions borstlös DC-motor serie
- Hålkonstruktion
- Stabil & jämn drift
- Integrerad hög precision; lätt konstruktion; hög vridmomentprestanda
- Uppfyller kraven för låg hastighet och högprecisions positionskontroll
- Motorkärnmaterial: premium silikonstålplåtar och högtemperaturbeständiga högpresterande permanenta magneter
- Yttre rotor flerstegs platt design för högre vridmoment i utrymmesbegränsade tillämpningar
- Borstlös struktur kombinerad med högpresterande lager för smidigare rotation och längre livslängd
- Högprecisions, lågtemperaturdrift legeringsresistorer för noggrann strömavkänning och kontroll
- Full N-kanal tre-fas full-brygga driva med låg intern resistans och hög ström utgång
- Stöder sömlös växling mellan vridmoment öppet loop, hastighet och positionskontroll lägen
- Huvudkontroll: 32-bitars MCU med 72 MHz driftfrekvens
- Ingångsspänning: 12~60 V (drift)
- Engångskalibrering, nollpositionen försvinner aldrig
- CE-certifierad (som angivet)
Specifikationer
| Modell | L6020 |
| Nominell spänning | 24V |
| Nominell ström | 1.4A |
| Spetskraft | 12.6W |
| Nominalt vridmoment | 0.58N.m |
| Spetsvridmoment | 1.4N.m |
| Betygsatt hastighet | 200rpm |
| Encoder | 18bit |
| Rotormoment | 394gcm² |
| Övervakning av motortemperatur | JA |
| Kontrolllägen | Hastighet/Position |
| Kommunikationsprotokoll | RS485 eller CAN |
| Övergripande dimensioner | Φ58mm×21mm |
| Vikt | 185g |
Gränssnittsdefinition
- ID SWITCH
- CAN/RS485
- B/L: RS485-B eller CAN-L
- A/H: RS485-A eller CAN-H
- V-: Negativ strömförsörjning
- V+: Positiv strömförsörjning
- T: UART-sändare
- R: UART-mottagare
- G: Signalgnd
Tillämpningsscenarier
- Humanoida robotar
- Robothänder
- Exoskelett
- Fyra-benta robotar
- AGV-fordon
- ARU-robotar
- 360° kamera
- Handhållen kamera
- LiDAR
- Gimbal
PC-programvara / Kontrolllägen (som angivet)
PC-baserad parameterjustering / testning / firmwareuppgradering tillgänglig.Kompatibel med öppna utvecklingsplattformar inklusive PC, MCU, PLC, industriell dator och Raspberry Pi.
- Momentläge
- Hastighetsläge
- Multi-Turn Kontrolläge
- Single-Turn Position + Riktning Läge
- Inkrementell Positionsläge
- Multi-Turn Kontrolläge (med hastighetsbegränsning)
- Single-Turn Position + Riktning Läge (med hastighetsbegränsning)
- Inkrementell Positionsläge (med hastighetsbegränsning)
Manualer / Filer
Detaljer

Designad för låg hastighet, hög precision rörelsekontroll med en kompakt hallow-shaft formfaktor.

Kärnkonstructionen fokuserar på smidig rotation och noggrann strömstyrning för stabil positionsprestanda.
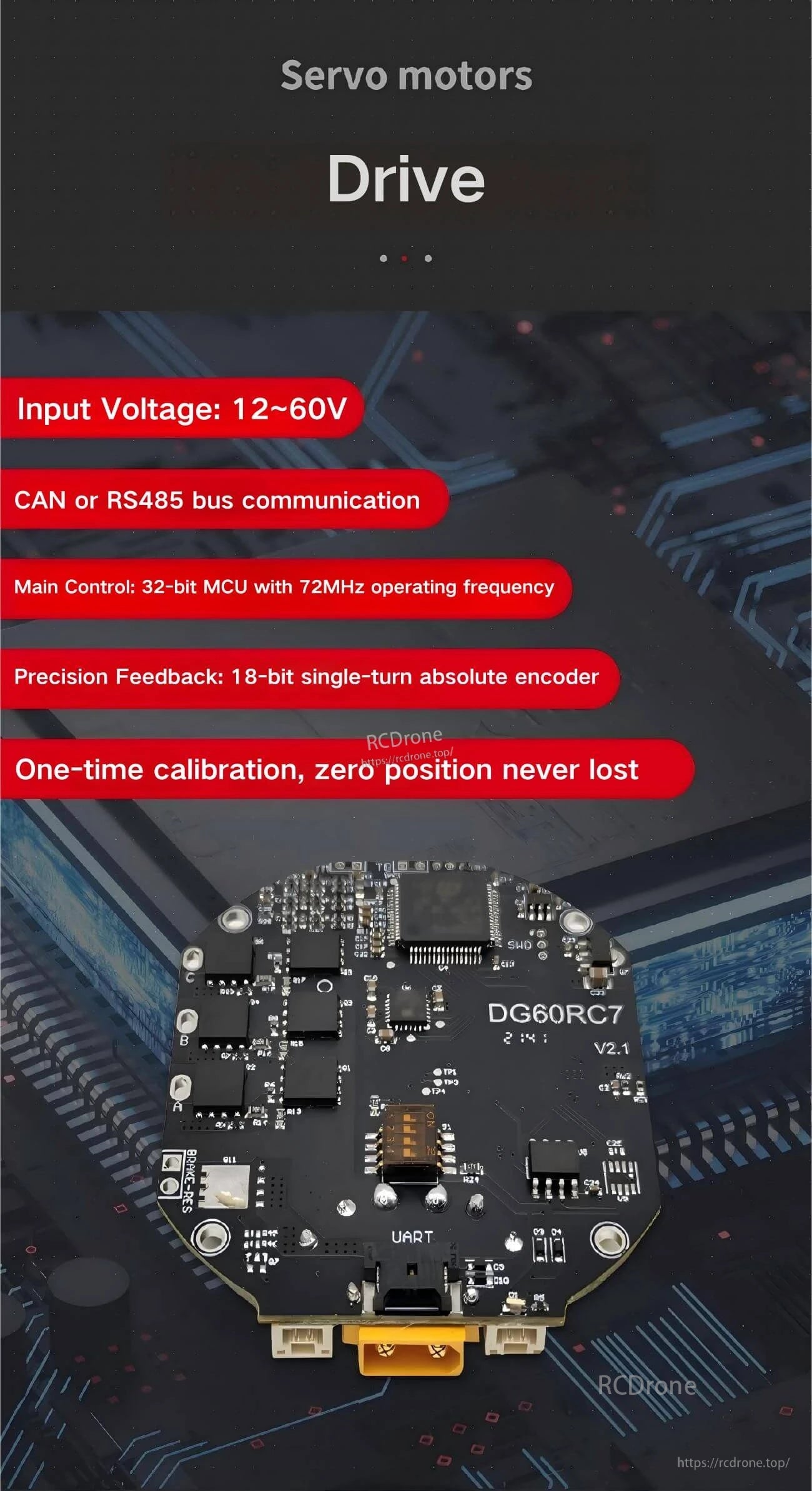
Inbyggd drivrutinelektronik stödjer CAN eller RS485 busskontroll med 18-bitars absolut encoderåterkoppling.

Tydlig gränssnitts märkning hjälper till att koppla ström, UART och CAN/RS485 anslutningar korrekt.
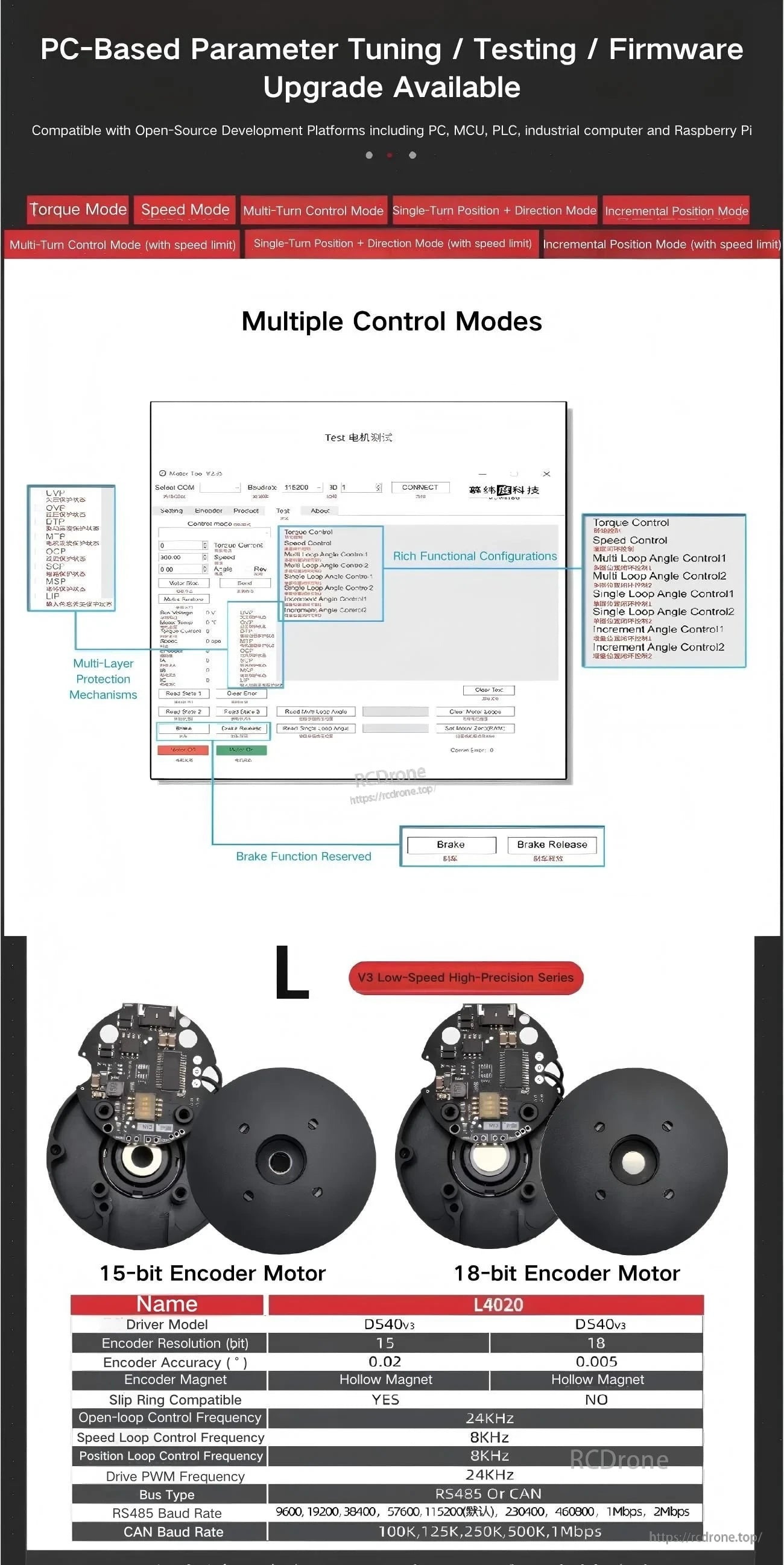
PC-programvara möjliggör parameterjustering, testning och firmwareuppgraderingar över vridmoment, hastighet och positionskontrolllägen.
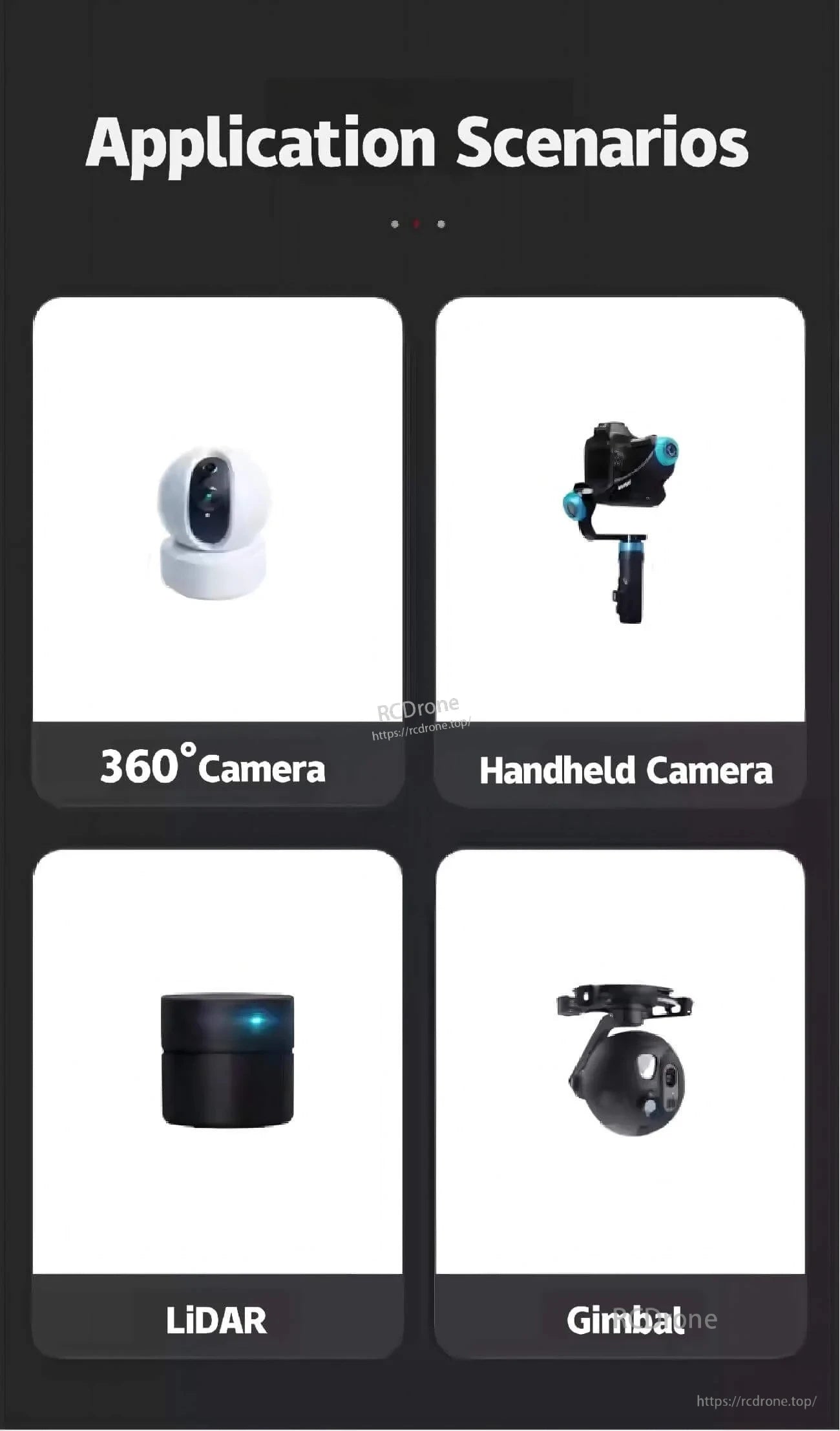
En praktisk lösning för kompakta mekatronikbyggen såsom gimbals, 360° kameror och LiDAR-moduler.
Related Collections

