






MyActuator RMD-X4-10 Planetväxelaktuator 10N·m Dubbel Encoder EtherCAT+CAN Robotledsdrift
MyActuator RMD-X4-10 Planetväxelaktuator 10N·m Dubbel Encoder EtherCAT+CAN Robotledsdrift
MyActuator
Det gick inte att ladda hämtningstillgänglighet
Översikt
Den MyActuator RMD-X4-10 planetära aktuatorn är en högpresterande DC-motorledmodul designad för avancerade robotapplikationer. Med ett 12.6:1 planetväxel förhållande, 10N·m toppvridmoment, och 100W nominell uteffekt, integrerar den ett dubbelencoder system (17-bit ingång / 18-bit utgång) som levererar 0.01° precisionskontroll. Dess stora ihåliga struktur stöder multisensorintegration, vilket möjliggör en central hub för fullkroppshållningskontroll i humanoida robotar. Med EtherCAT och CAN dual-protokoll kommunikation uppnår aktuatorn 250μs ultrahurtig respons, vilket gör den idealisk för högdynamiska, högpålitliga scenarier såsom humanoida robotar, bioniska bendrivningar och industriell automation.
Nyckelfunktioner
-
Hög Precision Dubbel Encoder: 17-bit ingång / 18-bit utgång med 0.01° noggrannhet
-
Topparmoment 10N·m med 12.6:1 planetväxel förhållande
-
Korsade rullager: Exceptionell motståndskraft mot böjmoment för stabila robotleder
-
EtherCAT + CAN Bus Dubbelkommunikation: Stöder fler-maskins koppling, ultrahurtig 250μs respons
-
Stor Hålig Struktur: Möjliggör integration av sensorer, kablar och glidringar för komplexa robotsystem
-
Hög Tillförlitlighet: Utformad för humanoid gångkontroll, smidiga övergångar för löpning, hopp och komplexa rörelser
-
Kompakt & Lättviktig: Φ55mm × 55.5mm, vikt 0.33kg
Specifikationer
| Parameter | Värde |
|---|---|
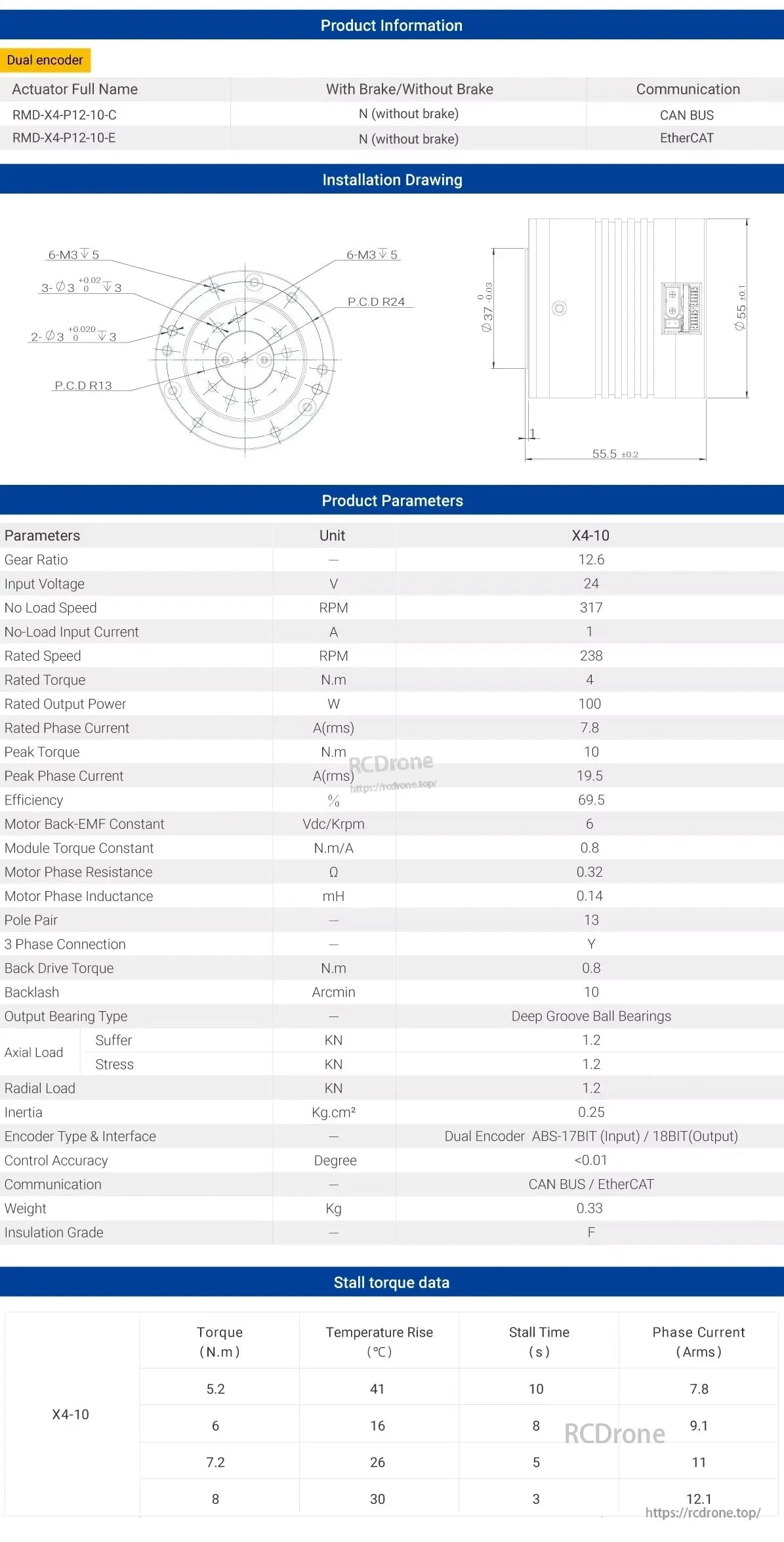
| Modell | RMD-X4-10 |
| Utväxlingsförhållande | 12.6:1 |
| Ingångsspänning | 24V DC |
| Nominell hastighet | 238 RPM |
| Tomgångshastighet | 317 RPM |
| Nominell uteffekt | 100W |
| Nominellt vridmoment | 4N·m |
| Spetsvridmoment | 10N·m |
| Nominell ström | 7.84A |
| Tomgångsström | 1A |
| Encoder Typ | Dubbla encoders (ABS-17bit / 18bit) |
| Kommunikation | EtherCAT + CAN Bus |
| Vikt | 0.33kg |
| Storlek | Ø55mm × 55.5mm |
Applikationer
-
Humanoida Robotar – Leddrivningar för armar, ben och torso
-
Bioniska Benmotorer – Hög vridmoment med anti-böjdesign för löp- och hoppgång
-
Samarbetsrobotar – Smidig rörelsekontroll för industriell automation
-
Exoskelett – Lätta, högdynamiska aktuatorer för människohjälpmedel
-
Flexibla Produktionslinjer – Multi-axelsynkronisering genom EtherCAT hög hastighetskommunikation
Förpackning & Tillbehör
-
Strömförsörjning + CAN-buss kommunikationskabel ×1
-
120Ω Terminalmotstånd ×1
EtherCAT Kommunikationskabel ×2
-
CAN Bus Kommunikationsmodul ×1 (USB-CAN-adapter ingår per beställning)
Förpackningsdimensioner: 100mm × 100mm × 70mm
Detaljer

RMD-X4-PT2.5-10-C dual encoder robotleddriv med 24V ingång, 12.6 växelverkan, 4N·m vridmoment och 100W utgång. Funktioner inkluderar CAN BUS/EtherCAT-gränssnitt, 317RPM utan belastning hastighet och 0.28kg vikt. Inkluderar installationsmått och tekniska specifikationer.

Planetär aktuator med 10N.m toppvridmoment, 12.6:1 växelverkan, 0.33kg vikt. Storlek: Ø55mm×55.5mm. Funktioner inkluderar EtherCAT/CANBUS kommunikation, dual encoder, hög hastighet MCU, CAN-chip och djupspåriga kullager.

Dual Encoder ABS-17BIT Ingång / 18BIT Utgång, X4-10, SN:40225621, MYACTUATOR

MYACTUATORs RMD-X4-10 Planetära Aktuator erbjuder 100W kraft, 46Nm vridmoment, dual encoder, 238rpm hastighet. Levereras med ström + CAN BUS-kabel, 120Ω resistor, EtherCAT-kabel, CAN BUS-modul och gratis USB-CAN-adapter.
RMD-X4-10 Robotisk Planetär Aktuator har en dual encoder, 12.6 växelförhållande, 24V ingång, 100W utgång, och CAN BUS/EtherCAT. Den levererar 4N.m vridmoment, 238 RPM hastighet, väger 0.33kg, och använder djupspåriga kulager för hög effektivitet.

X4-10-gränssnittet inkluderar ström, CAN och EtherCAT-portar. Förpackningen innehåller strömförsörjning, kablar, motstånd och modul. Mått: 100x100x70mm. Inkluderar USB-CAN-adapter med varje beställning.

X4-10-tillbehör inkluderar strömförsörjning, CAN BUS och EtherCAT-kablar, terminalmotstånd och en CAN BUS-modul. Detaljer täcker kontakter, ledarfunktioner, signallinjer och anteckningar om USB-CAN-adapter.
Related Collections






