





MyActuator RMD-X4-36 34N·m planetväxelaktuator DC borstlös motor med dubbel encoder, EtherCAT & CAN-buss, 36:1 utväxling
MyActuator RMD-X4-36 34N·m planetväxelaktuator DC borstlös motor med dubbel encoder, EtherCAT & CAN-buss, 36:1 utväxling
MyActuator
Det gick inte att ladda hämtningstillgänglighet
Översikt
MyActuator RMD-X4-36 Planetary Actuator DC Brushless Motor är en högpresterande ledaktuator designad för robotik och automationssystem som kräver precis rörelsekontroll, hög vridmomentutgång och kompakt integration. Med ett 34N·m toppvridmoment, 36:1 växelförhållande och en korsad rullagerstruktur levererar den utmärkt motståndskraft mot böjning och hållbarhet. Med EtherCAT + CAN dubbla kommunikationsprotokoll och en 250μs ultrah snabb respons är denna aktuator idealisk för humanoida robotar, robotarmar, mobila plattformar och andra avancerade robotapplikationer. Dess dubbla encodersystem (ABS 17-bit ingång / 18-bit utgång) säkerställer ultrahög positionsnoggrannhet, medan den kompakta storleken (55mm × 61mm, 0.36kg) möjliggör lätt och effektiv integration.
Nyckelfunktioner
-
Hög Precision Dubbel Encoder: 17-bit (ingång) + 18-bit (utgång) för 0.01° noggrannhet.
-
EtherCAT + CAN Bus Protokoll: Flexibel kommunikation med 250μs ultrahastigt svar.
-
Korsade Rullager: Överlägsen motståndskraft mot böjning och lång livslängd.
-
Hög Effektivitet: Kompakt 55mm diameter, 61mm längd och endast 0.36kg vikt.
-
Topmoment 34N·m och Nominalmoment 11.5N·m säkerställer stabil, kraftfull rörelseutgång.
-
Hög Effektivitet: 100W nominell effekt med smidig FOC (Fältorienterad Kontroll) teknik.
-
Mångsidig Tillämpning: Utformad för humanoida robotar, exoskelett, manipulators och automationssystem.
Specifikationer
| Parameter | Värde |
|---|---|
| Modell | RMD-X4-P36-36-C |
| Ingångsspänning | 24V |
| Utväxlingsförhållande | 36:1 |
| Tomgångshastighet | 111 RPM |
| Tomgångsström | 0.9 A |
| Nominell hastighet | 83 RPM |
| Nominellt vridmoment | 11.5 N·m |
| Nominell uteffekt | 100 W |
| Spetsvridmoment | 34 N·m |
| Spetsfasström | 21.5 A (rms) |
| Polpar | 13 |
| Encoder Typ | Dubbla Encoder ABS 17-bit (Ingång) / 18-bit (Utgång) |
| Kommunikationsprotokoll | EtherCAT / CAN Bus |
| Storlek | Ø55mm × 61mm |
| Vikt | 0.36 kg |
Förpackningens innehåll
-
1 × RMD-X4-36 Planetary Actuator Motor
-
1 × Strömförsörjning + CAN Bus Kommunikationskabel
-
1 × 120Ω Terminalmotstånd
-
2 × EtherCAT Kommunikationskablar
-
1 × CAN Bus Kommunikationsmodul (USB-CAN-adapter)
Tillämpningar
-
Humanoida och bioniska robotar
-
Samarbetsrobotarmar
-
Exoskelett och rehabiliteringsrobotar
-
Tjänsterobotar och mobila plattformar
-
Precisionsautomationssystem som kräver kompakta, högmomentaktuatorer
Detaljer

Planetarisk aktuator med 34N.m toppmoment, 36:1 utväxlingsförhållande, 0.36 kg vikt, Ø55mm×61mm storlek. Funktioner EtherCAT/CANBUS kommunikation, dubbel encoder, hög hastighet MCU, CAN-chip och korsade rullager.

RMD-X4-P36-36C motor: 24V, 10.5N.m vridmoment, 83RPM, dubbel encoder, EtherCAT+CAN BUS, 36 växel förhållande, 0.36kg, ABS-17BIT/18BIT encoder, detaljerade mått inkluderade.

X4-36 motor, 100W, 12N.m, dubbel encoder, 17BIT ingång, 18BIT utgång, 63rpm, 1:36 växel förhållande, CAN bus gränssnitt, LED indikator.

MYACTUATOR X4-36 motor, 100W, 12N.m, dubbel encoder, 83rpm, 1:36 förhållande. Inkluderar strömförsörjning, CAN BUS kabel, 120Ω resistor, EtherCAT kablar och CAN BUS modul med gratis USB-CAN adapter.
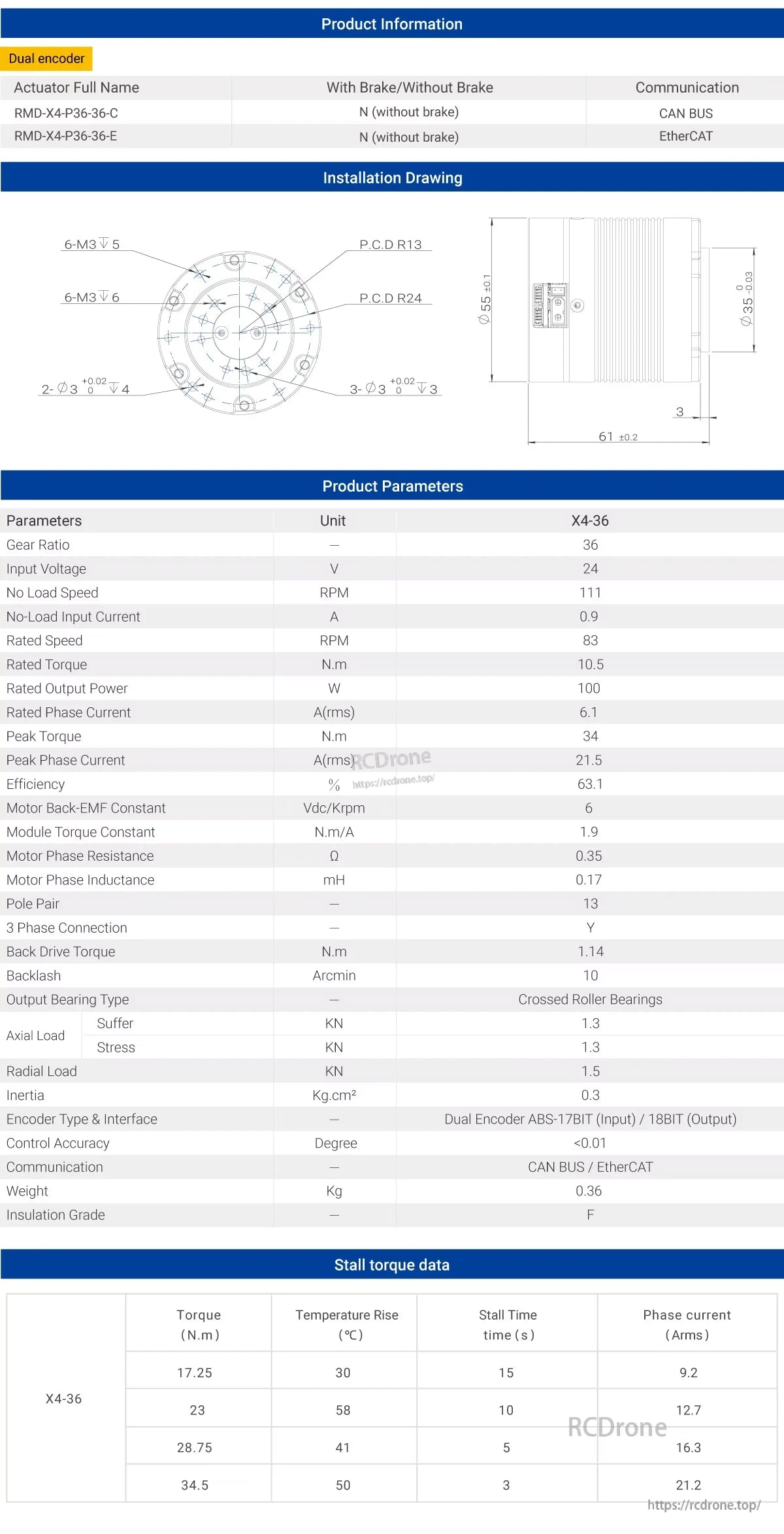
RMD-X4-P36-36 motor har dubbel encoder, 36 växel förhållande, 24V ingång, 100W utgång, CAN BUS/EtherCAT. Nominellt vridmoment: 10.5 N.m, hastighet: 83 RPM, vikt: 0.36 kg. Stall vridmoment data inkluderar vridmoment, temperaturökning, tid och fasström värden.

Gränssnittsdetaljer inkluderar ström, CAN och EtherCAT-portar. Förpackningen innehåller motor, kablar, motstånd, kommunikationsmoduler. Dimensioner: 100x100x70mm. Inkluderar USB-CAN-adapter.
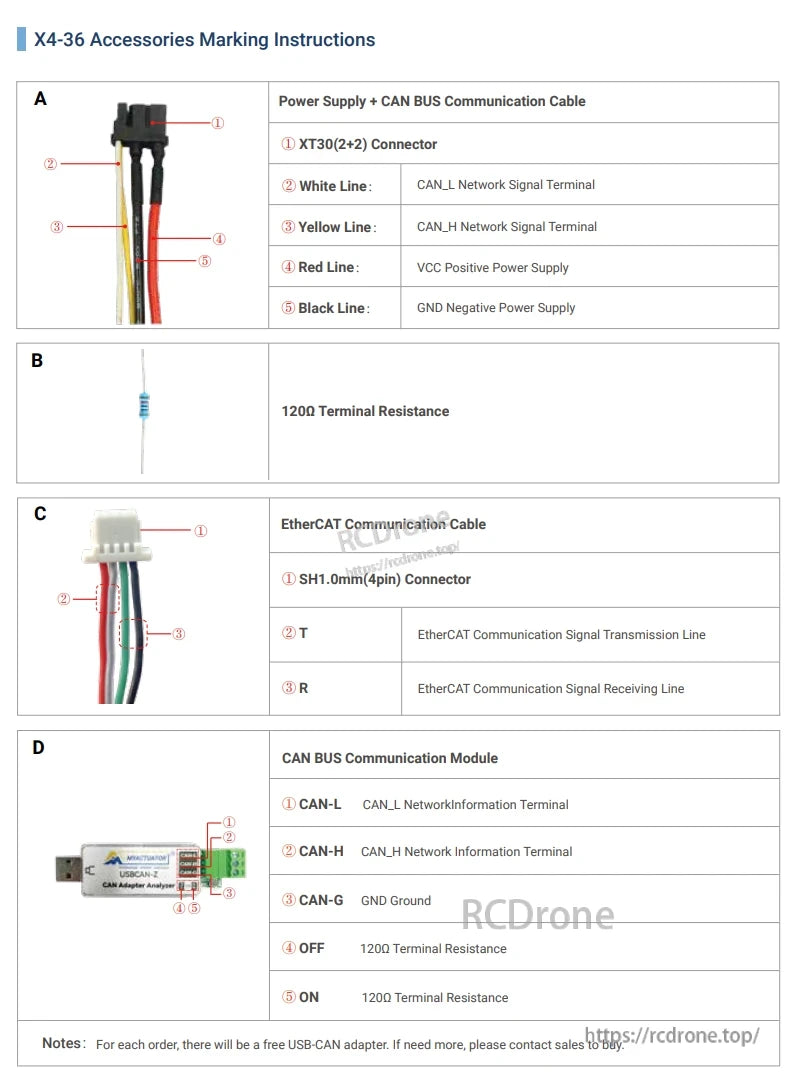
X4-36-tillbehör inkluderar strömförsörjning, CAN BUS, EtherCAT-kablar, 120Ω motstånd och CAN-modul. Detaljer täcker kontakter, ledarfärger, signallinjer och terminalinställningar för kommunikations- och strömanslutningar. USB-CAN-adapter ingår med varje beställning.
Related Collections





