





MyActuator RMD-X6-60 Dubbel Encoder Servoställdon 320W 20N·m 60N·m Topp 48V EtherCAT CAN BUS Högprecisions Robotledsmotor
MyActuator RMD-X6-60 Dubbel Encoder Servoställdon 320W 20N·m 60N·m Topp 48V EtherCAT CAN BUS Högprecisions Robotledsmotor
MyActuator
Det gick inte att ladda hämtningstillgänglighet
Översikt
Den MyActuator RMD-X6-60 intelligenta servoställdon är en kompakt, högpresterande integrerad drivenhet designad för robotik, automation och precisionsrörelsekontrollapplikationer. Utrustad med EtherCAT och CAN BUS kommunikationsgränssnitt och ett dubbelencoder-system, erbjuder detta ställdon hög vridmomentdensitet, precis kontroll och flermodhantering av rörelse. Det är idealiskt för robotleder, robotarmar, mobila robotar och industriella automationssystem som kräver hög precision och tillförlitlighet.
Nyckelparametrar:
-
Nominal effekt: 320W
-
Nominalt vridmoment: 20N·m
-
Spetsvridmoment: 60N·m
-
Nominal hastighet: 153RPM
-
Utväxlingsförhållande: 19.612:1
-
Dual Encoder Precision: 17-bit ingång / 17-bit utgång
-
Kommunikationsprotokoll: CAN BUS, EtherCAT
-
Ingångsspänning: 48V
Nyckelfunktioner
-
Dual Encoder Design
Integrerade 17-bit ingångs- och utgångsencoders ger exakt feedback för noggrann rörelsekontroll och statusövervakning. -
Multi-Protokoll Stöd
Inbyggda EtherCAT och CAN BUS-gränssnitt säkerställer bred kompatibilitet med olika robot- och automationskontrollplattformar. -
Hög Effektivitet och Moment
Kapabel att leverera 320W kontinuerlig effekt och 60N·m toppmoment, vilket uppfyller kraven för dynamiska och tunglastapplikationer. -
Hybridkontrolllägen
Stöder positions-, hastighets- och vridmoment hybridkontroll, vilket möjliggör avancerade fleraxliga och koordinerade rörelsesystem. -
Högprecisionsåterkoppling och Snabb Respons
Integrerad hög hastighet MCU och CAN-processorer ger millisekundsnivå respons för precis kontroll. -
Kompakt och Lätt Design
Dimensioner av 120mm × 120mm × 80mm och en vikt av 0.82kg gör det idealiskt för lätta robotapplikationer där utrymme och vikt är avgörande.
Tekniska specifikationer
| Parameter | Värde |
|---|---|
| Modell | RMD-X6-P20-60-C |
| Ingångsspänning | 48V |
| Nominal effekt | 320W |
| Nominalt vridmoment | 20N·m |
| Spetsvridmoment | 60N·m |
| Nominal hastighet | 153RPM |
| Tomgångshastighet | 176RPM |
| Nominalström | 9.5A (RMS) |
| Tomgångsström | 0.9A |
| Spetsström | 29.1A (RMS) |
| Utväxlingsförhållande | 19.612:1 |
| Polpar | 10 |
| Encoderupplösning | Ingång: 17bit / Utgång: 17bit |
| Vikt | 0.82kg |
Gränssnittsbeskrivning
Ström- och kommunikationsportar
| Port | Beskrivning |
|---|---|
| EtherCAT_OUT | EtherCAT utgångsport |
| EtherCAT_IN | EtherCAT ingångsport |
| CAN_L | CAN låg signalterminal |
| CAN_H | CAN hög signalterminal |
| GND | Negativ strömförsörjning |
| VCC | Positiv strömförsörjning |
Signalterminaler
R+/R-: Återkopplingsdata från modul till masterstation
-
T+/T-: Kontrollkommandosignaler från masterstation till modul
Dimensioner och Struktur
-
Diameter: 120mm
-
Höjd: 80mm
-
Monteringshål: P.C.D R26.25 och R22 med 12 × M4 gängade hål
-
Utgångsaxel: Standardflänsgränssnitt för flexibel koppling med externa komponenter
Förpackningsinformation
| Ingår i paketet | Kvantitet |
|---|---|
| Strömförsörjning + CAN BUS kommunikationskabel | 2 st |
| EtherCAT kommunikationskabel | 2 st |
| 120Ω terminalmotstånd | 1 st |
| CAN BUS kommunikationsmodul (USB-CAN-adapter) | 1 st |
Förpackningsdimensioner:
-
Längd × Bredd × Höjd: 120mm × 120mm × 80mm
Tillbehör och Anslutningar
Strömförsörjning + CAN BUS-kabel
-
Kontakt: XT30 (2+2)
-
Vit Linje: CAN_L signal
-
Gul Linje: CAN_H signal
-
Röd Linje: VCC positiv strömförsörjning
-
Svart Linje: GND negativ strömförsörjning
EtherCAT Kommunikationskabel
-
Kontakt: SH1.0mm (4-pin)
-
T-linje: EtherCAT kommunikationssignalöverföring
-
R-linje: EtherCAT kommunikationssignalmottagning
CAN BUS-modul
-
Terminaler: CAN_L, CAN_H, CAN_G och växlande 120Ω terminering (PÅ/AV)
-
USB-CAN-adapter som medföljer gratis med varje beställning
Tillämpningar
-
Samarbetsrobotleder
-
Tjänste- och humanoida robotar
-
Mobila robotstyrnings- eller drivsystem
-
Industriella robotarmar
-
Högprecisions rörelsekontrollsystem
Forsknings- och utbildningsplattformar
Sammanfattning
Den MyActuator RMD-X6-60 aktuatorn integrerar högnoggranna dubbla encoders, EtherCAT och CAN BUS kommunikationsprotokoll, hög vridmomentdensitet och en kompakt formfaktor, vilket gör den till en mångsidig och pålitlig lösning för robotik och industriell automation. Med sin 320W effekt, 60N·m toppvridmoment och 17-bitars högupplöst feedback levererar denna servoställdon exceptionell prestanda och kontrollnoggrannhet för avancerade robotikprojekt.
Detaljer
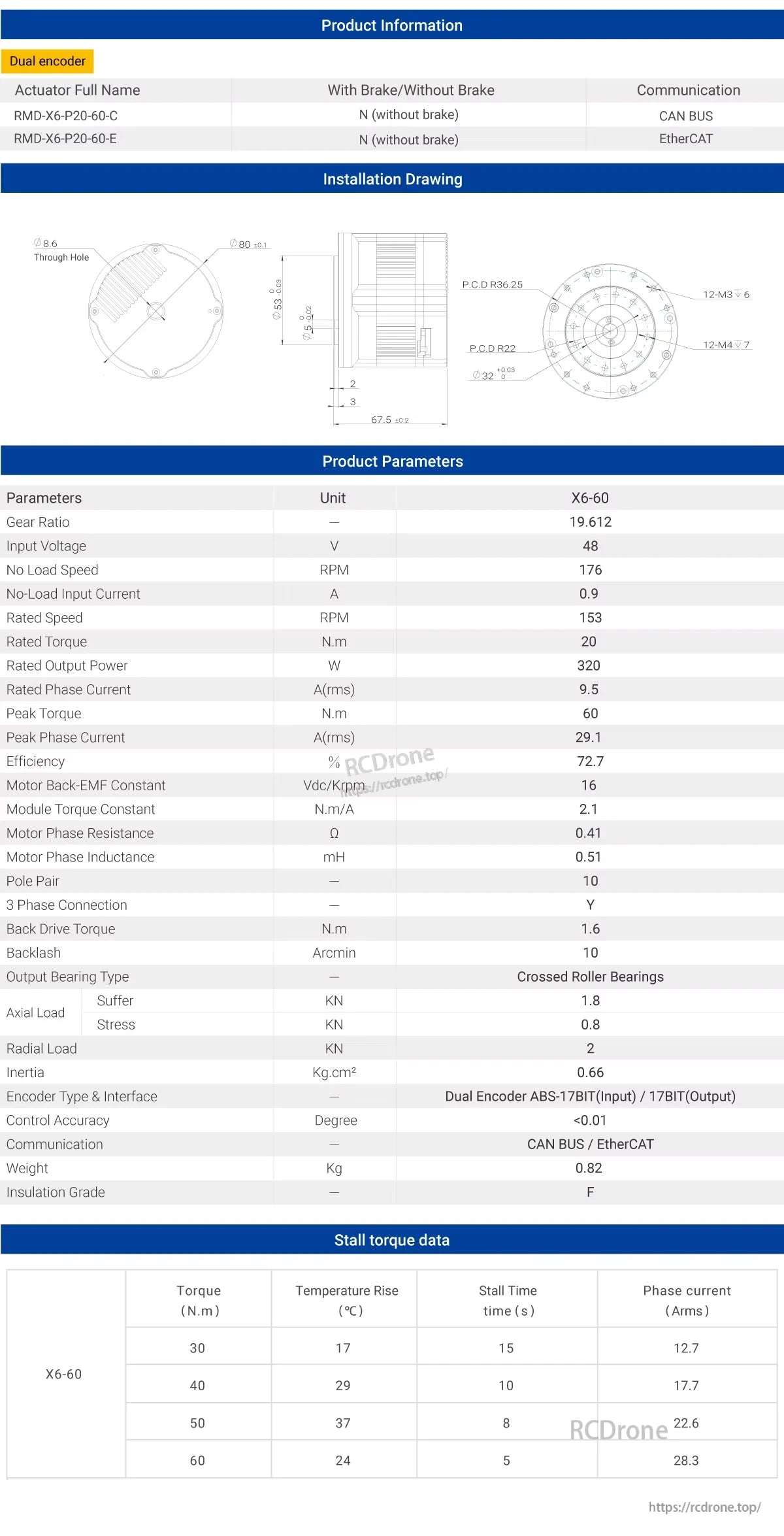
RMD-X6-60 servoställdon har en dubbelencoder, 19.612 utväxlingsförhållande, 48V ingång, 320W effekt, CAN BUS/EtherCAT kommunikation, 20 N.mklassat vridmoment, 60 N.mtoppvridmoment och väger 0.82 kg.
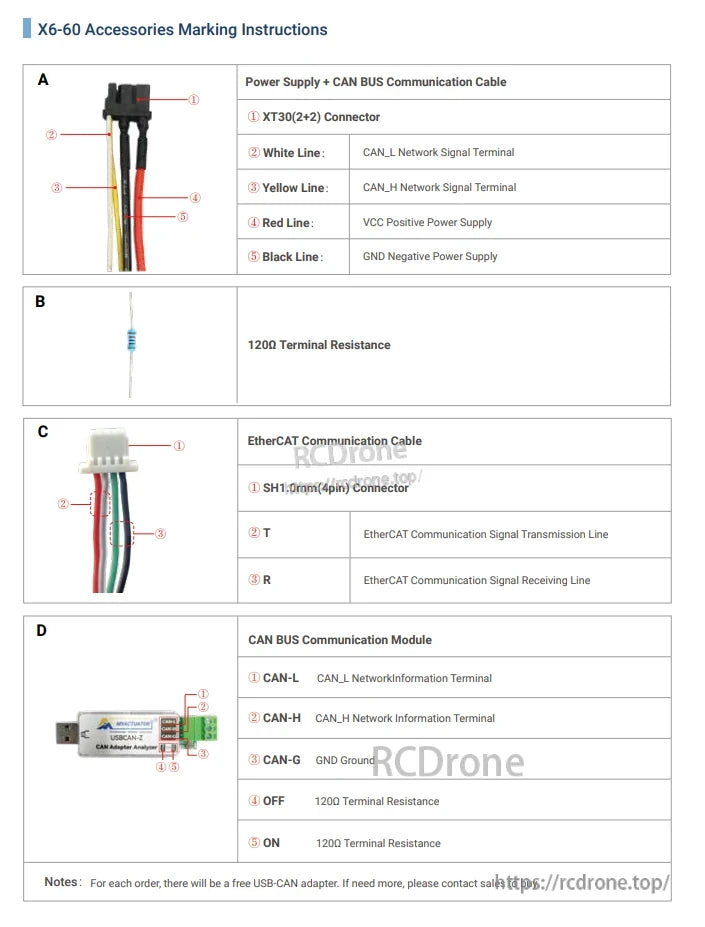
X6-60-tillbehör inkluderar ström- och CAN BUS-kabel med färgkodade ledningar, 120Ω terminalmotstånd, EtherCAT-kabel med T/R-linjer och en CAN BUS-modul med terminaler för CAN-L, CAN-H, GND och inställningar för terminalmotstånd. En gratis USB-CAN-adapter ingår per beställning.

RMD-X6-P20-60-C servoställdon med EtherCAT+CAN BUS, 19.612 förhållande, 48V ingång, 153RPM nominell hastighet, 20Nm vridmoment, 320W utgång, dubbel encoder, hög hastighet MCU och CAN chip, korslagd rullager.
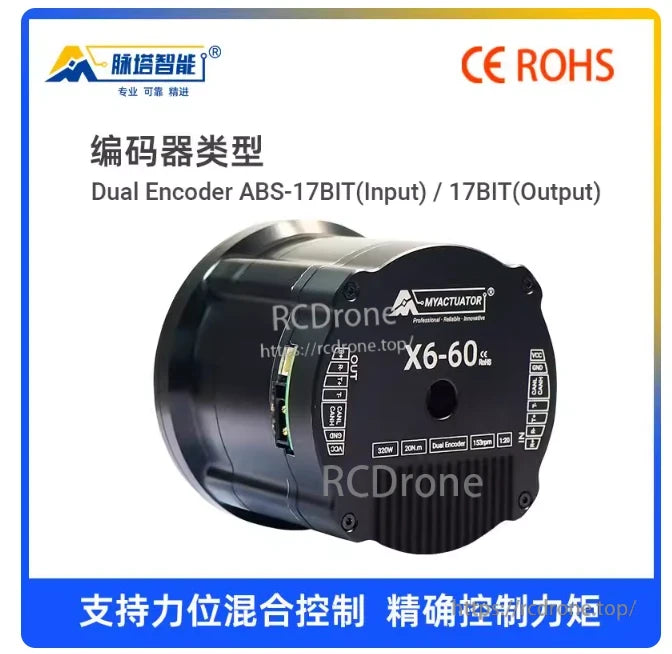
Dubbel Encoder ABS-17BIT In/Ut, X6-60 Servomotor, 300W, 20N.m, 128rpm, stöder kraft-position hybridkontroll, precis vridmomentkontroll.
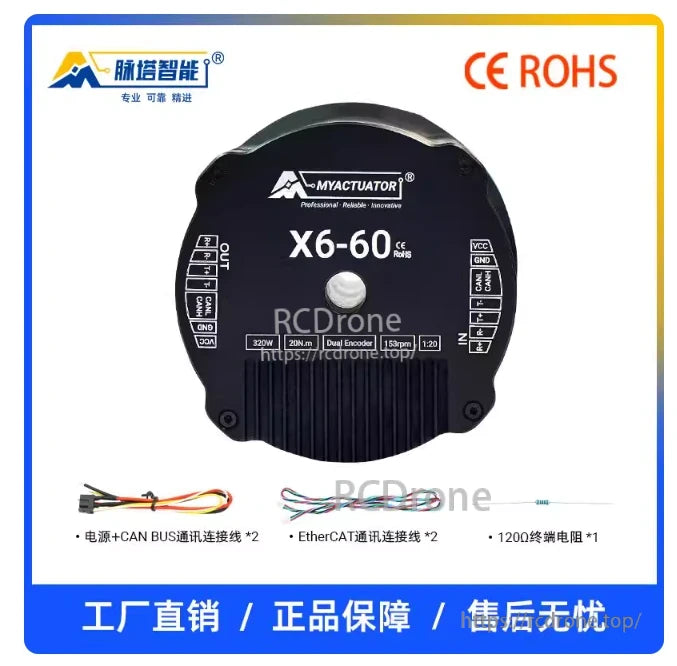
X6-60 servomotor, 320W, 20N.m, dubbel encoder, 158rpm, 1:20 förhållande, med CAN BUS och EtherCAT kablar, 120Ω terminator, CE ROHS certifierad.

RMD-X6-60 Servomotor förpackning med CAN BUS kablage, strömkabel och 1200 terminering resistor.
Related Collections





