





OYMotion ROH-AP001 Fingerfärdig Robothand, 6 DOF, 11 leder, kraftsensorer, UART/RS485/CAN, PID-styrning, 0,7 s
OYMotion ROH-AP001 Fingerfärdig Robothand, 6 DOF, 11 leder, kraftsensorer, UART/RS485/CAN, PID-styrning, 0,7 s
OYMotion
Det gick inte att ladda hämtningstillgänglighet
Översikt
OYMotion ROH-AP001 Dexterous Hand är en robothand med 11 rörliga leder och 6 inbyggda motorstyrningar som ger 6 aktiva frihetsgrader. En inbyggd PID-motorstyrningsalgoritm möjliggör exakt, upprepbar greppning och manipulation av objekt. Varje finger integrerar en kraftsensor för realtidsövervakning och sluten slinga kontroll av greppkraft. Fysiska gränssnitt inkluderar UART, RS485 eller CAN FD, med stöd för SerialCtrl dedikerad seriell protokoll, ModBus-RTU och CAN-protokoll. ROS/ROS2-plattformar stöds för sekundär utveckling via SDK (licensavtal krävs).
Nyckelfunktioner
- 6 aktiva DOF och 11 artikulationer; oberoende motoriserade fingrar för naturligt grepp.
- Inbyggda motorstyrningar och PID-kontroll; all aktivering integrerad i handen.
- Kraftsensorer på varje finger med taktil feedback och realtidskraftkontroll.
- Drivna tumrotation plus vikbar fingerdesign.
- Touchscreen-operation stöds vid fingertopparna.
- Snabb rörelse: 0,7 s fullständig böj/stretch och 0,7 s tum fullständig rotation.
- Lastkapacitet: upp till 30 Kg passiv last för fyra fingrar (böjda), 10 Kg per finger (böjt), 8 Kg per finger (sträckt).
- Mänsklig storlek och proportioner; mjuka fingertoppar och silikonhandske; anpassad handledsdesign; meddelandepip.
- Gränssnitt och protokoll: UART/RS485/CAN med SerialCtrl och ModBus-RTU; CAN vid 1M baud.
- Material som används: aluminiumlegering, zinklegering, rostfritt stål, silikon, plast.
Specifikationer
| Aktiv DOF | 6 |
| Rörliga leder (artikuleringar) | 11 |
| Vertikalt avstånd från spetsen av långfingret till handleden | 183 mm |
| Vertikalt avstånd från tumspets till handled | 95 mm |
| Tum längd | 111 mm |
| Maximal handflata bredd | 82 mm |
| Handledsdiameter | 49 mm |
| Maximal öppnings- och stängningsvinkel på tumme sidan | 0~31 ° |
| Maximal öppnings- och stängningsvinkel från tumme till handflata | 0~50 ° |
| Tum lateral rotationsvinkel | 0~90 ° |
| Böjning/sträckningstid för full rörelse vid maximal hastighet | 0.7 sekunder |
| Rotations tid för tumme för full räckvidd vid maximal hastighet | 0.7 sekunder |
| Aktiv kraft av varje fingertopp i sträckt tillstånd | ≥0.5 Kgf |
| Aktiv kraft av varje fingertopp i böjt tillstånd | ≥1.0 Kgf |
| Maximal aktiv kraft av tumme spets | ≥1.0 Kgf |
| Maximal passiv belastning för fyra fingrar i böjd position | 30 Kg |
| Maximal passiv belastning för varje finger i böjd position | 10 Kg |
| Maximal passiv belastning för varje finger i sträckt position | 8 Kg |
| Finger touch screen-funktion | Stöds |
| Fingerkraft återkoppling | Stöds |
| Arbetsmiljö temperatur | -10 °C ~ +40 °C |
| Arbetsmiljö luftfuktighet | Maximal relativ luftfuktighet 85% |
| Design livslängd | 3 år |
| Vikt (inklusive handled) | 640 g ± 5 g |
| Kommunikationsgränssnitt | UART/RS485/CAN |
| Baud Rate | UART: 9600/19200/38400/57600/115200/230400/460800/921600; RS485: 9600/19200/38400/57600/115200/230400/460800; CAN: 1M |
| Stödda protokoll | UART: SerialCtrl, ModBus-RTU; RS485: SerialCtrl, ModBus-RTU; CAN: SerialCtrl |
| Material | Aluminiumlegering; zinklegering; rostfritt stål; silikon; plast |
Tillämpningar
- Robotiska slutverkande och humanoida robotar.
- Utbildnings- och forskningsutrustning.
- Bioniska proteser.
- Industriell automation och AGV-system.
För beställningshjälp, integrationsvägledning eller teknisk support, vänligen kontakta [email protected] or besök https://rcdrone.top/.
Manualer
Detaljer

ROHand levererar ±1mm positionsnoggrannhet genom inbyggd PID-motorstyrning och erbjuder sex aktiva frihetsgrader för att simulera mänskliga handrörelser som nypa och greppa. Idealisk för humanoida robotar, robotiska ändeffektorer, inspektionssystem, intelligenta bioniska proteser och utbildnings- eller forskningsapplikationer, dess design stöder mångsidig, precis manipulation i komplexa uppgifter.
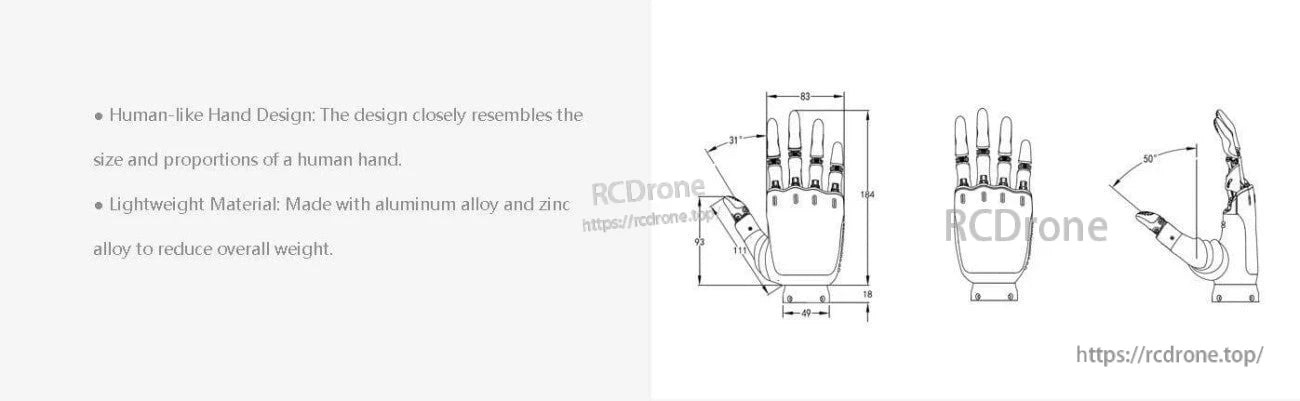
Mänsklig-liknande rörlig robothand med lätt konstruktion av aluminium-zinklegering och precisa dimensioner.

OYMotion ROH-AP001 rörlig robothand efterliknar mänskliga proportioner, med ledade fingrar och sensorer för precis, livsstor robotmanipulation.
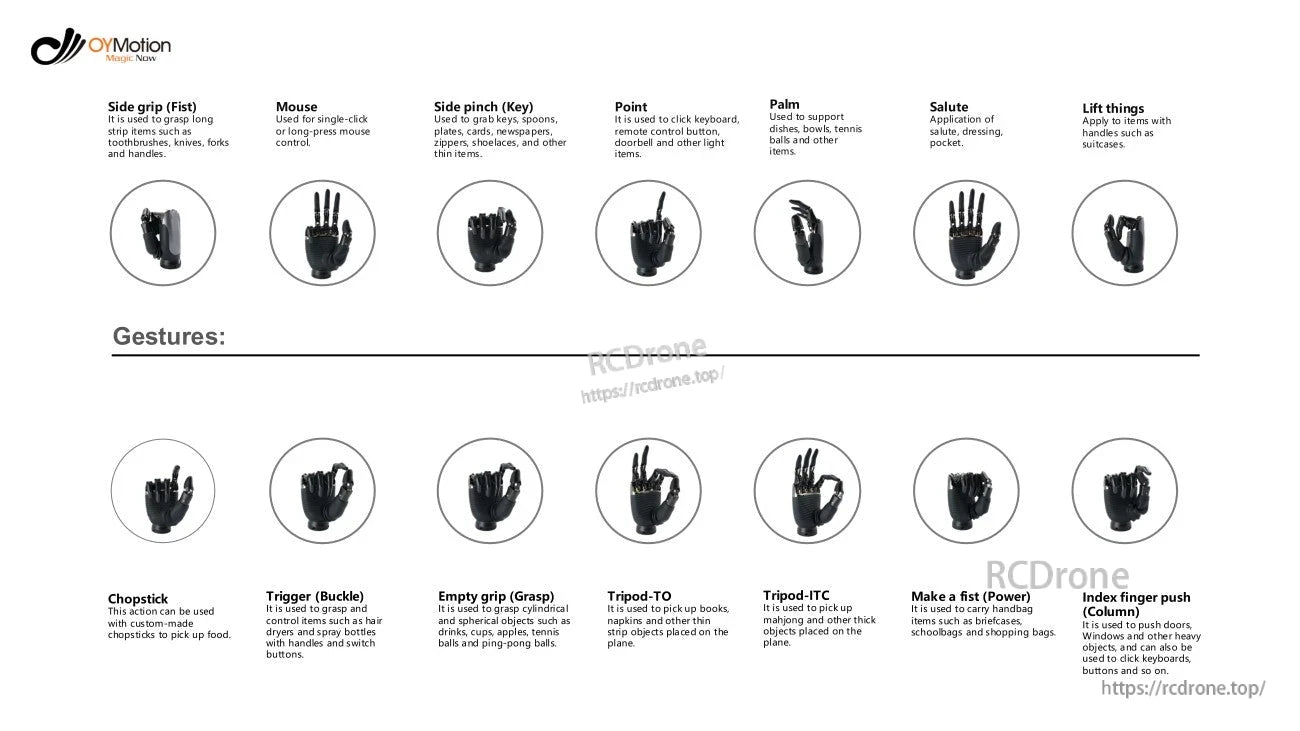
OYMotion robothand utför 14 precisa gester—som att greppa, peka och lyfta—för att hantera dagliga uppgifter som att använda ätpinnar, bära väskor eller klicka på tangentbord, vilket visar på avancerad fingerfärdighet och praktisk nytta.

OYMotion robothand erbjuder motoriserade fingrar, hopfällbar design, mjuka kuddar, motoriserad tumme, silikonhandske, inbyggd aktivering, signalhorn, anpassad handled och RS485-kontakt för rörligt naturligt grepp.
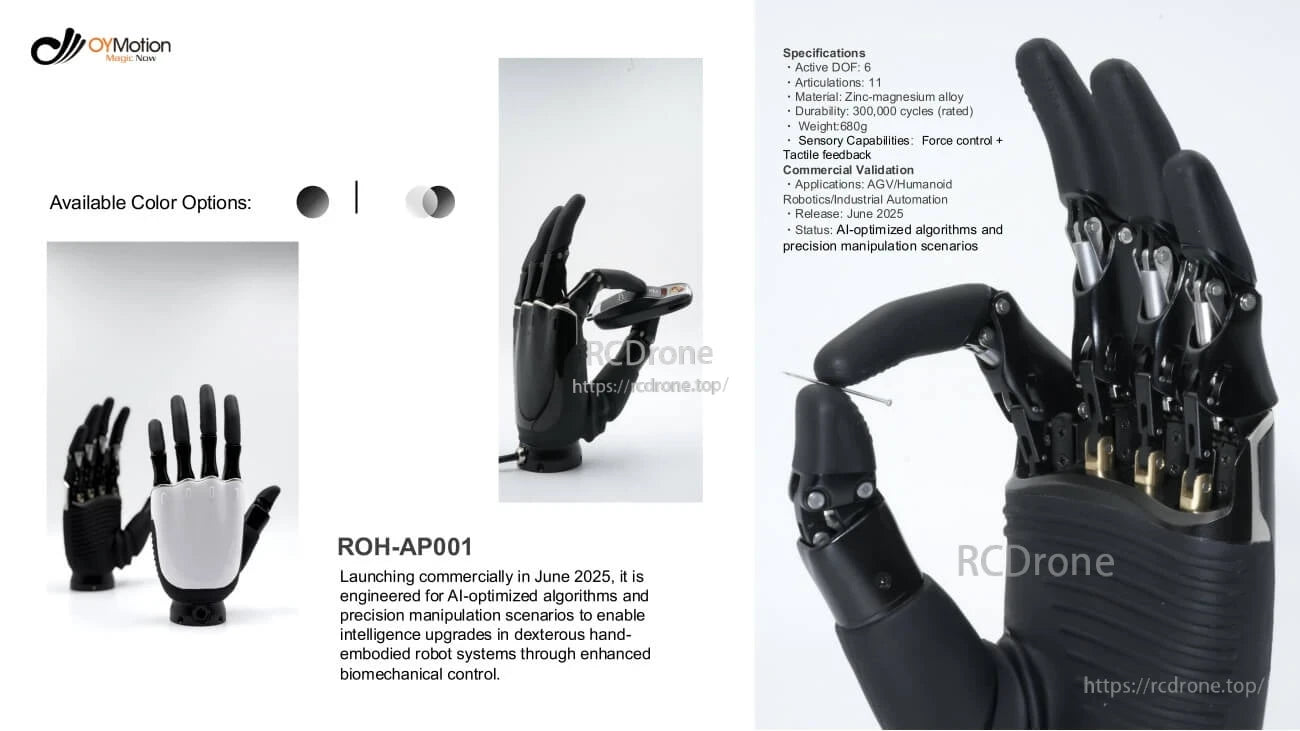
OYMotion ROH-AP001 rörlig robothand har 6 aktiva DOF, 11 leder, en byggnad av zink-magnesiumlegering, 300k cykler hållbarhet, väger 680g och erbjuder kraft/taktile feedback för AI och precisionsuppgifter—lansering juni 2025.

OYMotion ROH-AP001 robothanden har motoriserade fingrar, en motoriserad tumme, silikonhandske och inbyggd aktivering. Den är konstruerad av aluminium, zink, stål, silikon och plast, och inkluderar en signalanordning, anpassad handled, RS485-protokoll, hopfällbar design och tryckfjädrar.
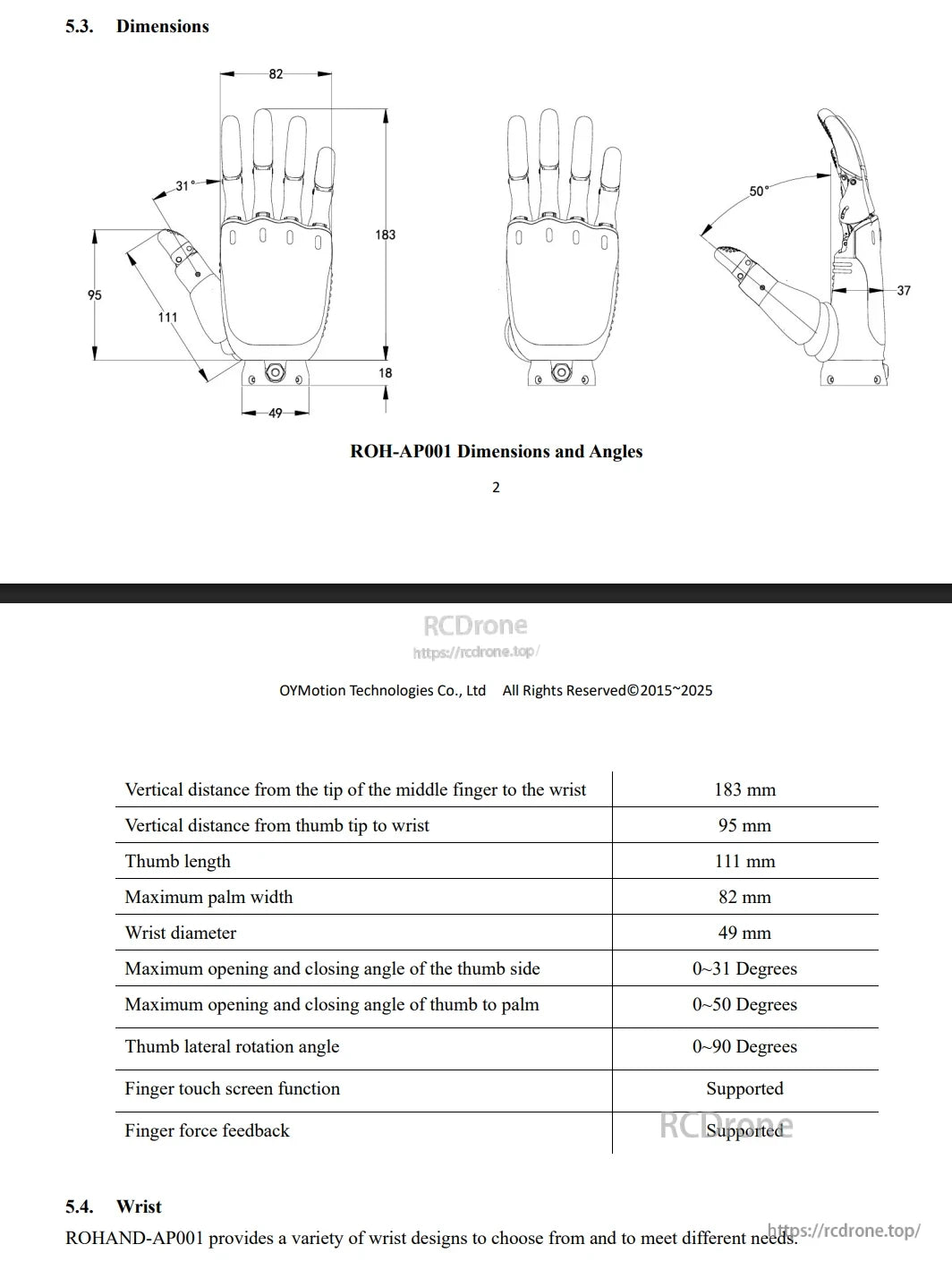
ROH-AP001 robothandens dimensioner inkluderar 183 mm från finger till handled, 95 mm från tumme till handled, 111 mm tumlängd, 82 mm handflata bredd, 49 mm handledsdiameter. Tumvinklar: 0-31° sida, 0-50° till handflatan, 0-90° rotation. Stöder pekskärm och kraftåterkoppling.
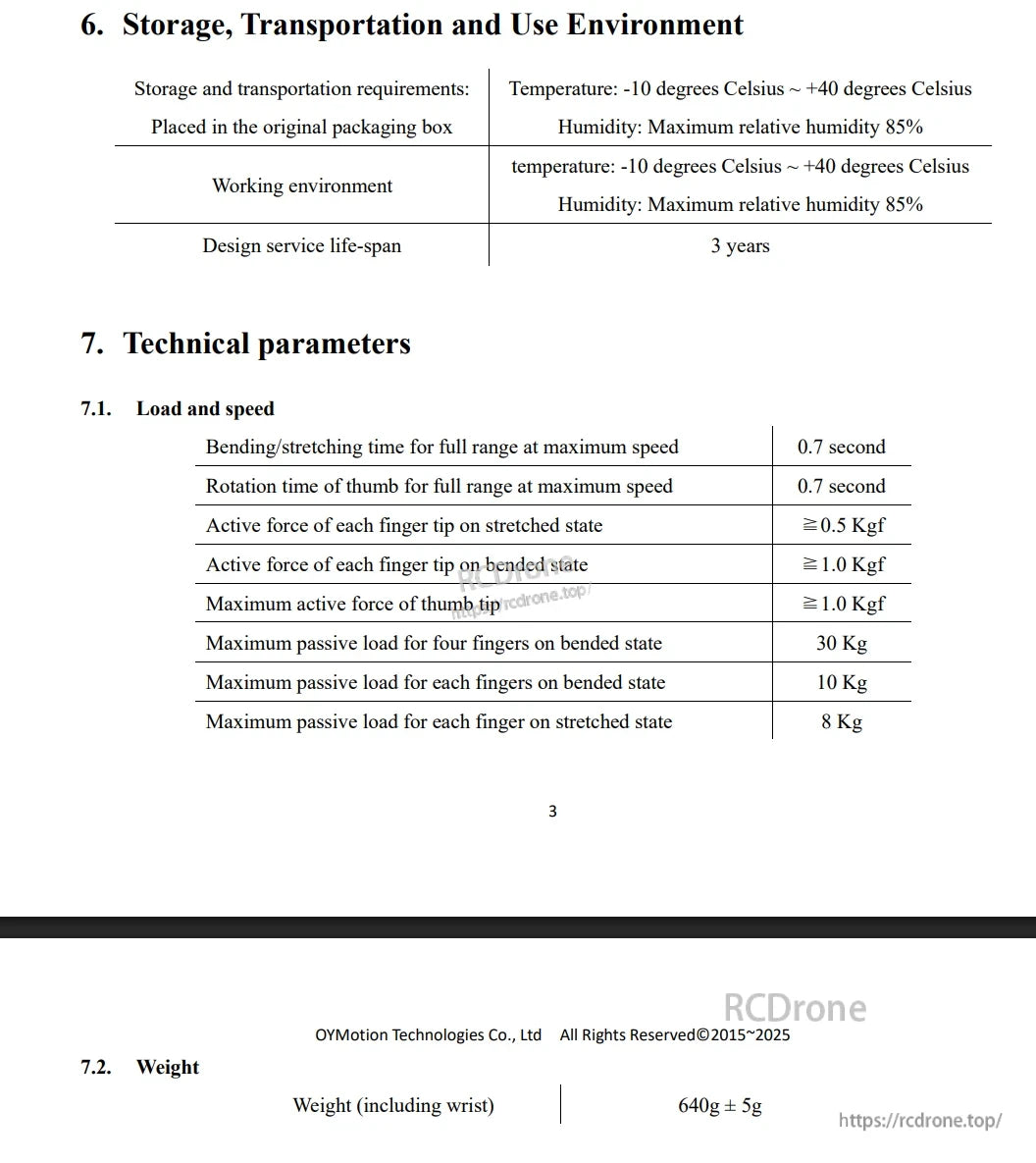
OYMotion ROH-AP001 robothanden fungerar mellan -10°C till +40°C, 85% max luftfuktighet. Designlivslängd: 3 år. Vikt: 640g ±5g. Aktiv kraft för fingrar ≥0.5–1.0 Kgf; passiv belastning upp till 30 kg för fyra fingrar.
Related Collections





