

1.Hur ansluter man?
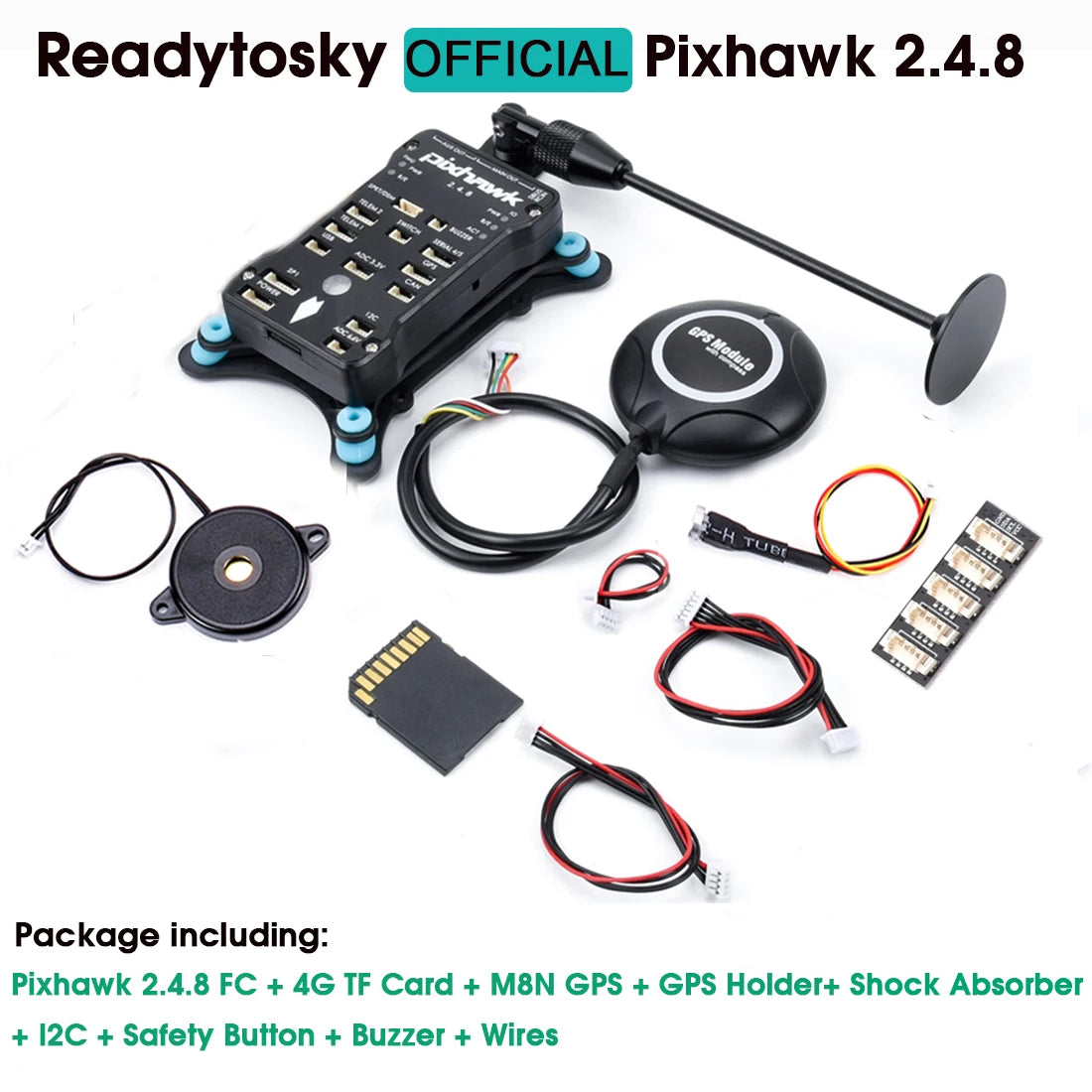
använd 6P linjeanslutningar till Pixhawk flygkontroller.

På grund av den olika fasta programvaran kan viss firmware, två portar användas, en del firmware kan bara använda en av portarna. Så hitta en av de tillgängliga portarna för anslutningen.
OM du använder PX4 firmware, kan endast TELEM1 användas, kan inte använda TELEM2.
För Ardupilot firmware rekommenderas att använda TELEM2-porten. Eller hitta en av de tillgängliga portarna för anslutningen.
För PX4 firmware bör du använda TELEM1-porten.
2.Hur använder man det?
Observera:När du använder Wifi Radio Telemetri-anslutning måste den använda 3DR Power Module eller 5V ESC för att mata ström till flygkontrollen. USB kan inte sättas in eftersom USB-prioritet är högre än radiotelemetri. Om USB-kabeln är ansluten kan den inte användas för radiotelemetriöverföring.

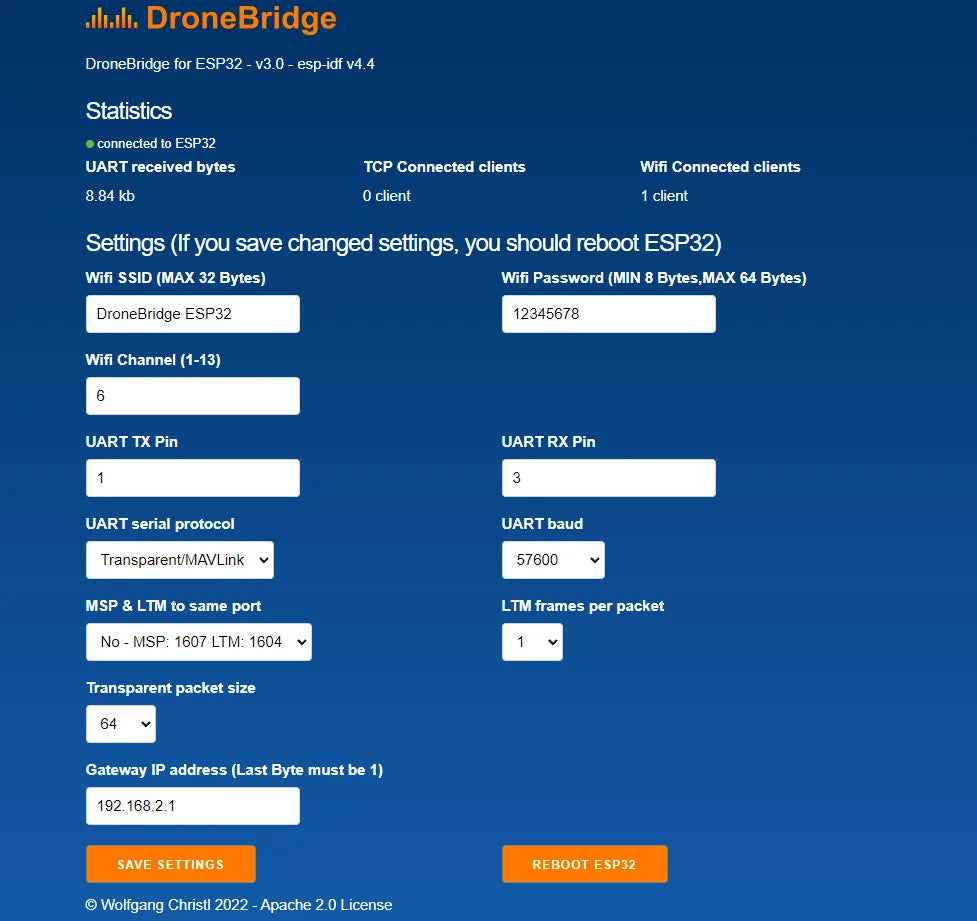
Wifi-hotspot-namnet är Drönare, så använd telefon eller datoranslut till denna hotspot, lösenordet är 12345678.
Obs: Vissa enheter (till exempel vissa iphone IOS-system) kan inte få ip automatiskt, du bör ställa in manuellt.
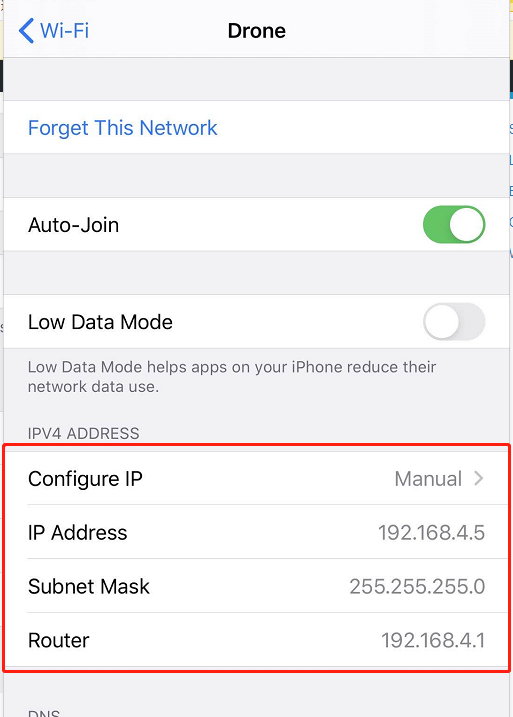
Ställ in Konfigurera IP som manuell. Ange IP-adress som "192.168.4.5" eller annat, men kan inte ställas in som "192.168.4.1″, det sista numret får inte överstiga 254. Ange Subnet Mask som "255.255.255.0" (bör ställa in detta värde, inte annat). Ställ in router som "192.168.4.1" (bör ställa in detta värde, kan inte annat)
När din enhet ansluter till denna hotspot kan du använda webbläsaren för att se http://192.168.4.1 , du kan ändra parametern.
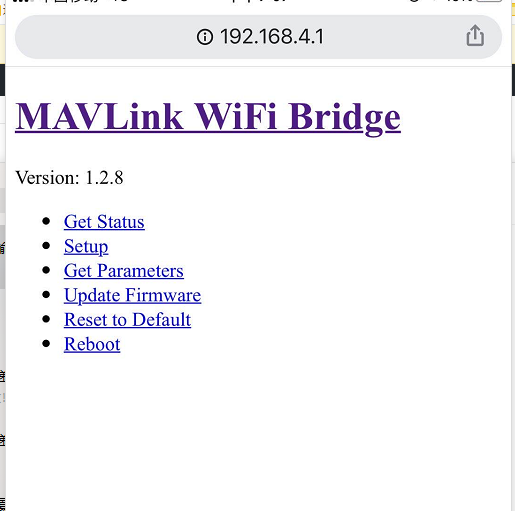
Obs, knappen är återställningsknapp, inte omstartknapp, när du trycker på knappen ställs alla parametrar till standard om du ändrar någon parameter.
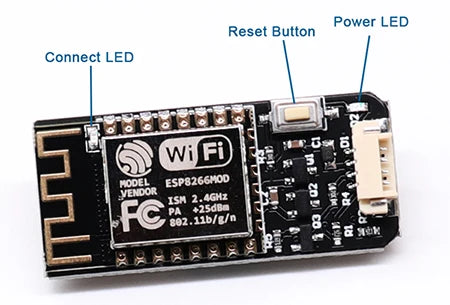
Strömlampa: när strömmen slås på är den röda lysdioden på.
Anslut LED: när anslutning till markkontroll (till exempel Mission Planner eller Qgroundcontrol) lyckas blinkar den blå lysdioden. vid frånkoppling med markkontroll lyser den blå lysdioden.
1.Hur använder jag uppdragsplaneraren?
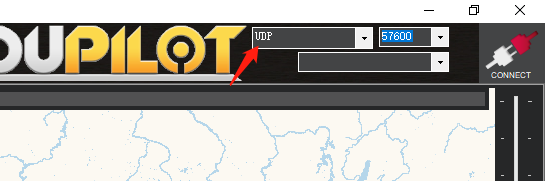
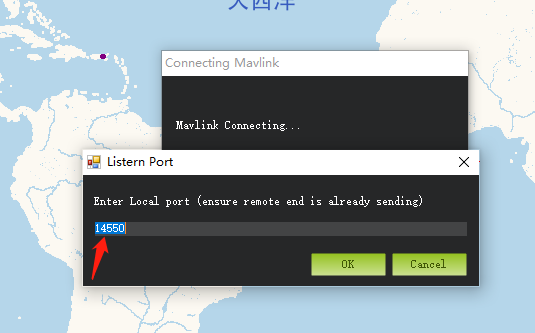
Först ansluter du din dator till hotspot Drone med framgång. Välj UDP. Klicka sedan på knappen "Anslut", använd porten 14550. Klicka på "Ok". Det finns ingen anledning att välja överföringshastighet. Standardöverföringshastigheten för wifi-modulen är 57600. Men 115200 eller annat kan också fungera.
2.Hur man använder för telefon
För Android: Ladda ner qgroundcontrol (endast för pixhawk, inte för APM)
härifrån,http://qgroundcontrol.com/downloads/
Ladda ner DroidPlanner härifrån,https://github.com/DroidPlanner/Tower/releases
För iphone(IOS): Sök qgroundcontrol på app store.
qgroundcontrol (endast för pixhawk, inte för APM) kan ansluta automatiskt, DroidPlanner bör välja portarna "UDP" och "14550" innan du ansluter till groundcontrol.