Notera:
PIXHAWK 2.4.8 stöder den senaste FMUV3 ardupilot och PX4 firmware.
1. Du kan välja vitt eller svart skal av PIXHAWK flygkontroll, hårdvaran är densamma. Vitt skal är vackrare. Om du behöver ett vitt skal, vänligen lämna ett meddelande.
2.Om paketet har 3DR-strömmodul, som standard skickar vi XT60-kontakt 3DR-strömmodul, om du behöver T, vänligen lämna ett meddelande.
3. Pixhawk har många paket. Vi skickar paketet som du väljer.
Pixhawk PX4 Autopilot PIX 2.4.8 32 Bit Flight Controller
Drag:
Pixhawk 2.4.8 stöder den senaste officiella ardupilot firmware och PX4 firmware.
1. De avancerade 32-bitars ARM CortexM4 högpresterande processorerna (2MB flash), kan köra NuttX RTOS realtidsoperativsystem;
2. 14 PWM / servoutgång;
3. Bussgränssnitt (UART, I2C, SPI, CAN);
4. Den integrerade reservkraften och reservstyrenheten misslyckas, den primära styrenheten misslyckas med att reservkontrollen är säker;
5. Tillhandahålla automatiska och manuella lägen;
6. Tillhandahåll redundant strömingång och failover;
7. Flerfärgade LED-lampor;
8. Tillhandahåll multi-tone summer Interface
9. Micro SD registrerar flygdata;
Specifikationer:
Gränssnitt
1,5 högspänningskompatibel UART 1, 2 med hårdvaruflödeskontroll
2. 2 KAN
3.Spektrum DSM / DSM2 / DSM-X satellitmottagare kompatibel ingång
4.Futaba SBUS-kompatibla in- och utgångar
5.PPM-signalingång
6.RSSI (PWM eller spänning)-ingång
7.I2C
8.SPI
9.3.3 och 6.6VADC ingång
10.Externt MICRO USB-gränssnitt
M9N GPS-modul
M9N är en GPS-modul som vanligtvis används i obemannade flygfarkoster, med följande egenskaper och applikationer:
Högprecisionspositionering: M9N använder avancerad GNSS-teknik, stöder flera satellitnavigeringssystem och kan tillhandahålla positioneringsinformation med hög precision. För obemannade luftfarkoster kan den uppnå exakt positionering och navigering.
Stöd för flera system: M9N stöder flera satellitnavigeringssystem, inklusive GPS, GLONASS, Galileo, BeiDou, etc. Detta gör att drönare kan ta emot flera satellitsignaler samtidigt, vilket förbättrar positioneringsnoggrannheten och tillförlitligheten.
Snabb positionering: M9N har snabba kallstarts- och varmstarttider, som snabbt kan erhålla satellitsignaler och utföra positionering, vilket gör den avgörande för snabb start och uppgiftsutförande av obemannade flygfarkoster.
Stark anti-interferensförmåga: M9N har utmärkt anti-interferensprestanda, som kan fungera stabilt i komplexa elektromagnetiska miljöer och inte är mottaglig för störningar från andra elektroniska enheter.
I drönarapplikationer kan M9N användas i följande aspekter:
Positionering och navigering: M9N ger korrekt positions- och hastighetsinformation för att hjälpa drönare att uppnå exakt navigering och flygkontroll.
Waypointnavigering: Genom att mata in förinställd waypointinformation i M9N kan obemannade flygfarkoster automatiskt flyga enligt rutten och uppnå autonoma waypointnavigeringsuppgifter.
Samarbete med flera flygplan: Flera drönare kan använda M9N-modulen för positionering och synkronisering för att uppnå applikationer som teamsamarbetsflygning och formationsflygning.
Återgång till retur: M9N kan tillhandahålla korrekt returpositionsinformation, vilket gör det möjligt för drönaren att säkert återvända till startpunkten eller förinställd returpunkt.
M9N kan söka efter fler satelliter utomhus med högre noggrannhet, snabbare sökhastighet och bättre stabilitet.(Det specifika antalet stjärnsökningar bestäms av miljön vid den tiden.)
Pixhawk PX4 med M9N GPS-detaljer
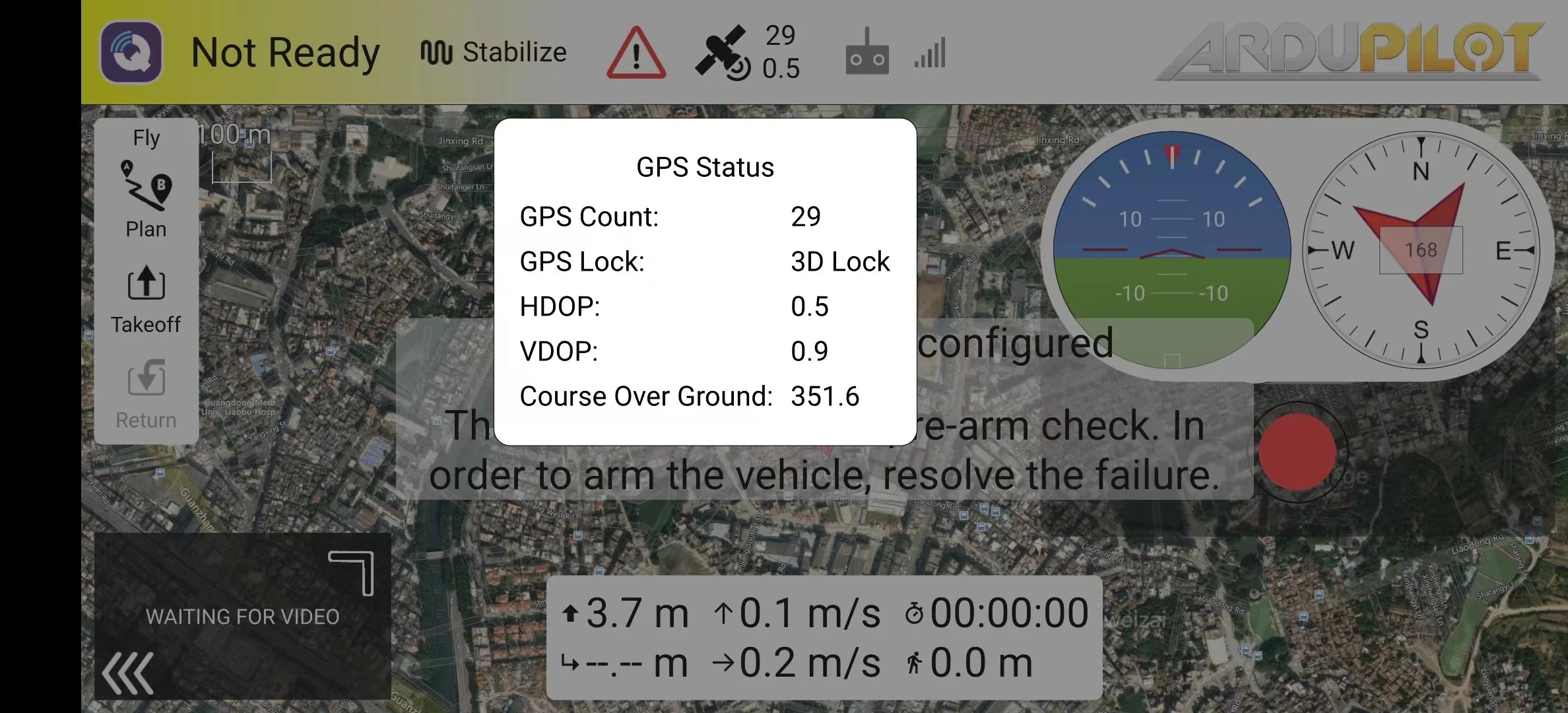
Inte redo för autopilot. Stabilize 2.5 ARDUINO Fly Road Linxing Road GPS Status: Shuitangshan, Lr GPS Count: 29/10/10 Plan W-168. GPS-lås: 3D-lås 10 grader. HDOP: 0,5. Start VDOP: 0,9. Konfigurerad för navigering i Guangdong Mile. Bana över marken: 351,6. University Liaobu Hospital Return The Way, Check: Waiting for Video. Syftar till att beväpna fordonet, lösa felet.