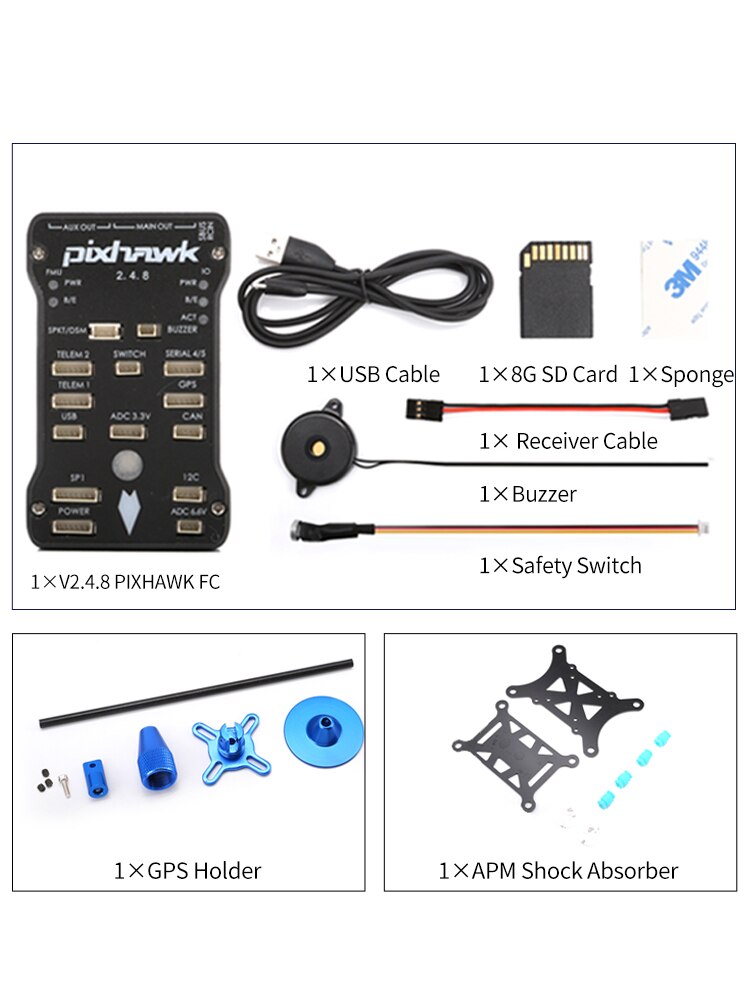
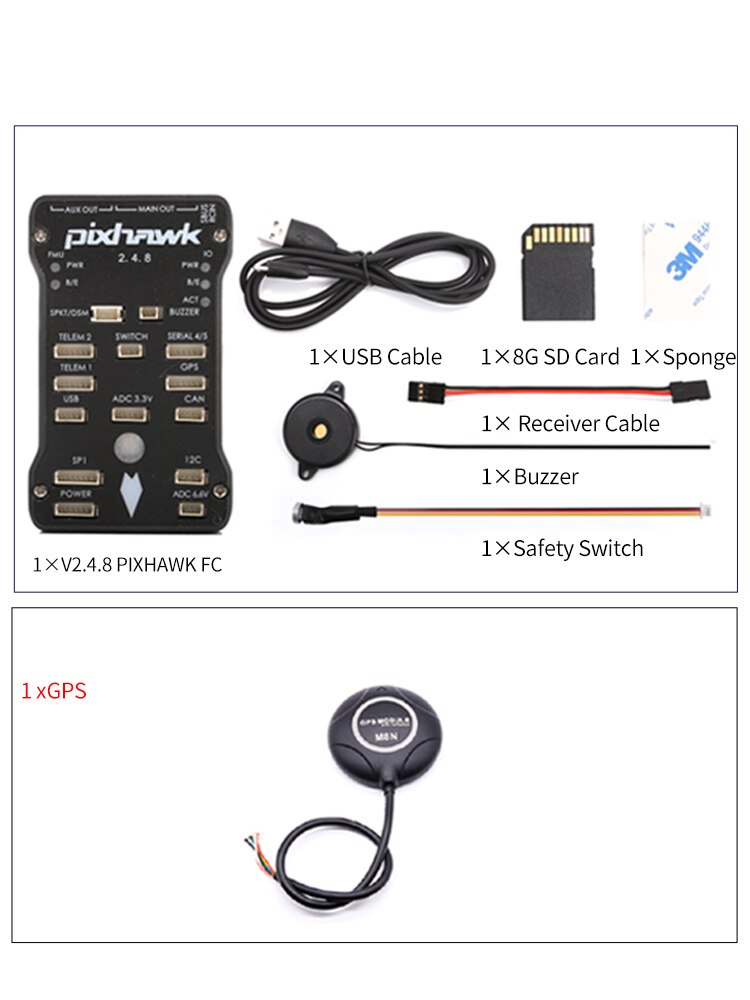
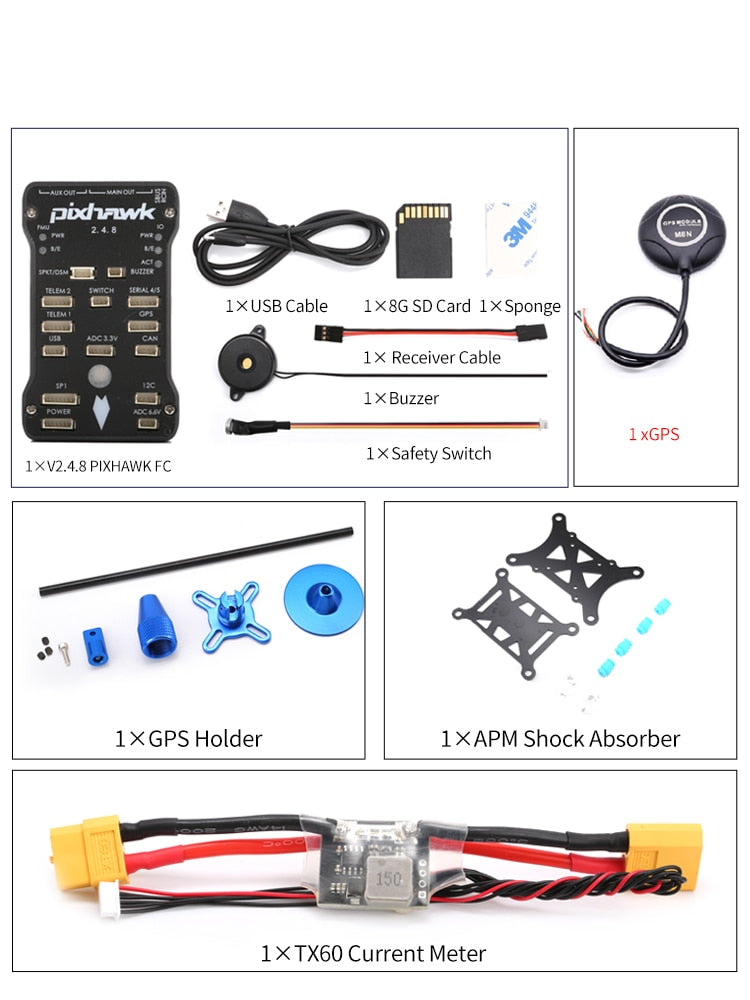
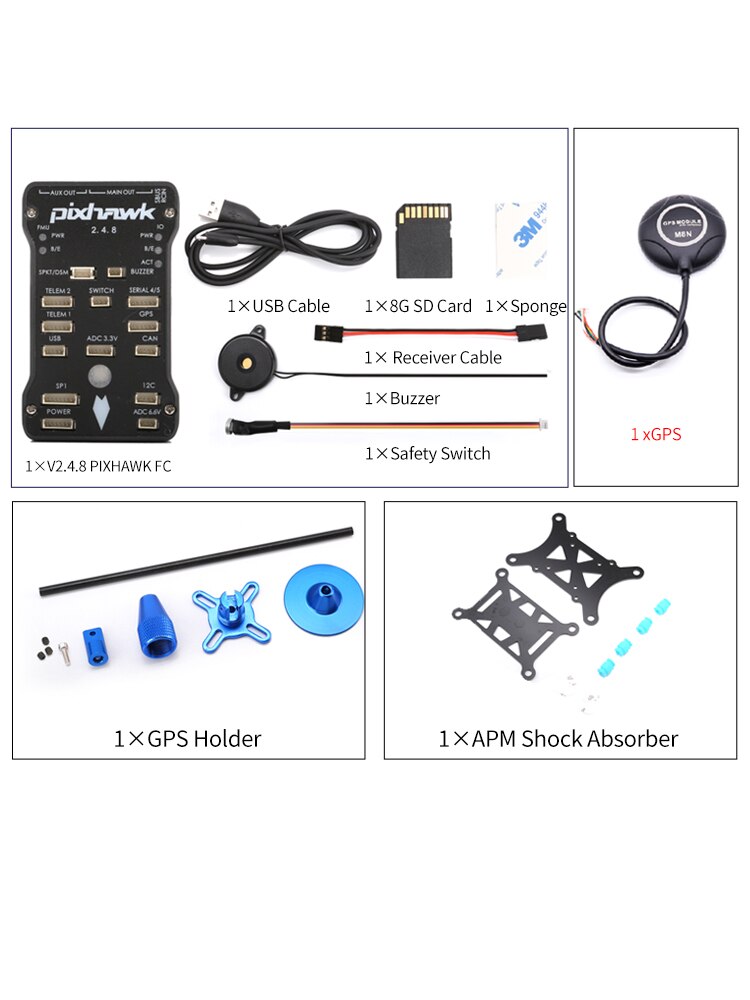
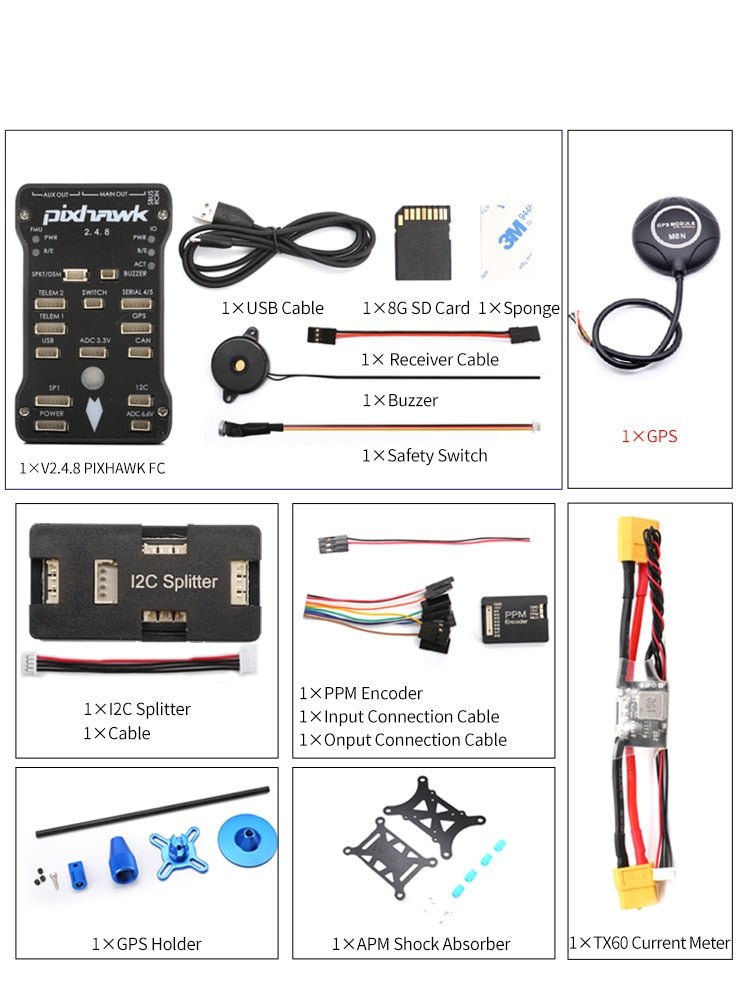
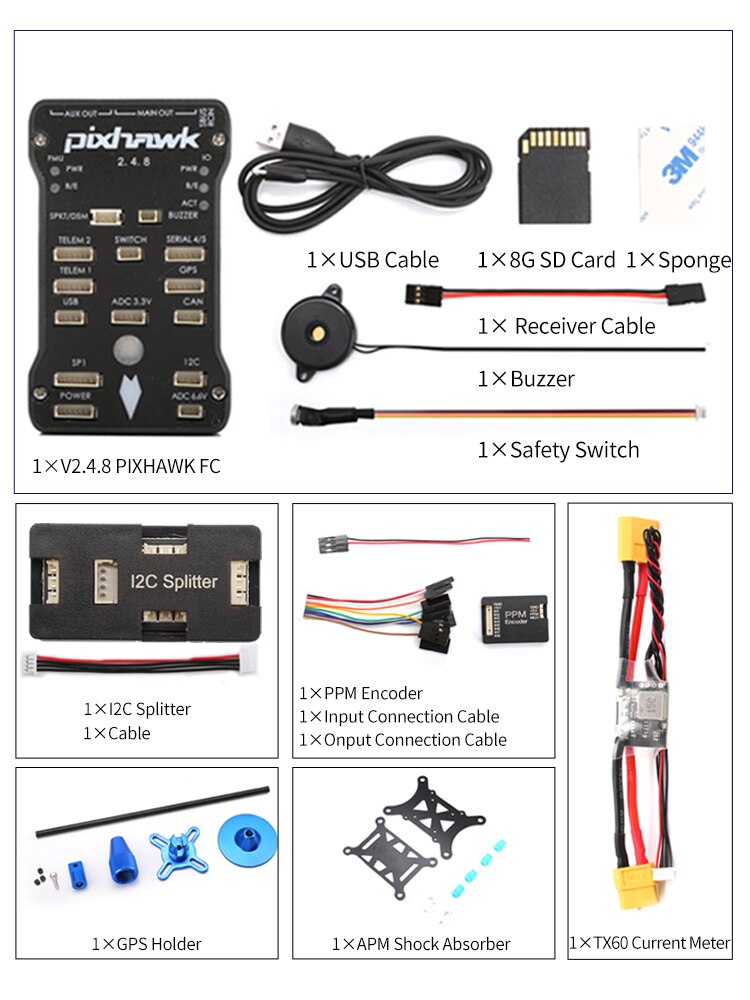
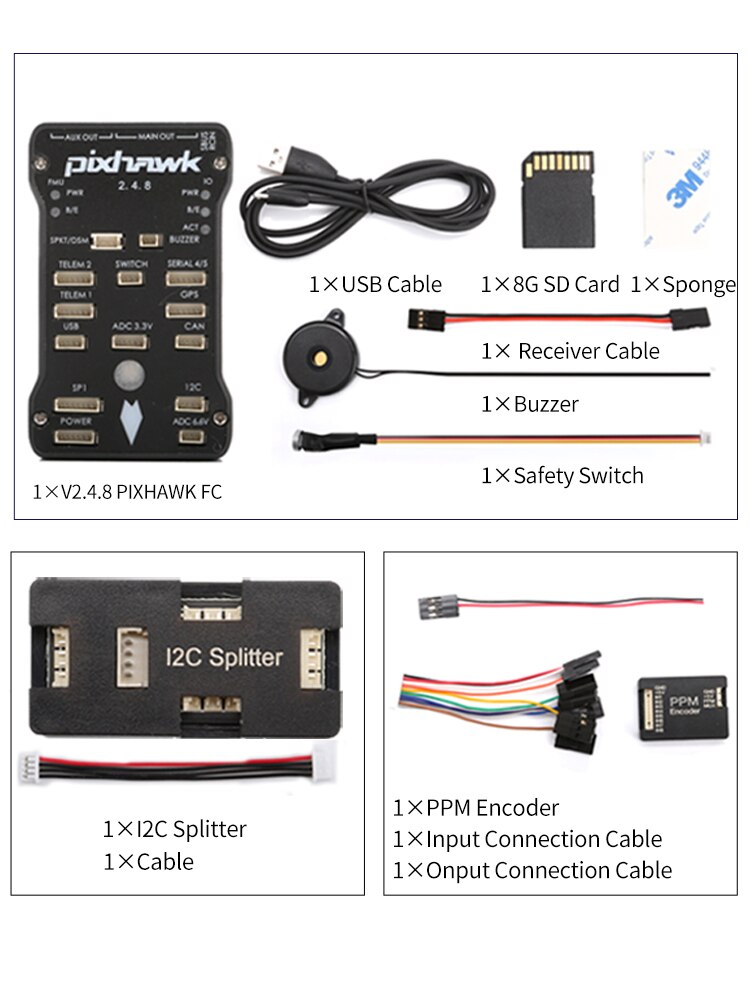
Pixhawk PX4 PIX 2.4.8 32 Bit Flight Control - FC M8N GPS 8G SD Buzzer PPM I2C Splitter För RC FPV Plane Drone Quadcopter Bilbåt
Pixhawk PX4 PIX 2.4.8 32 Bit Flight Control - FC M8N GPS 8G SD Buzzer PPM I2C Splitter För RC FPV Plane Drone Quadcopter Bilbåt
RCDrone
Det gick inte att ladda hämtningstillgänglighet
Pixhawk PX4 PIX 2.4.8 32 Bit Flight Control SPECIFIKATIONER
Använd: Fordon och fjärrkontrollleksaker
Uppgradera delar/tillbehör: Flight Control
Verktygstillbehör: Montagekategori
Fjärrkontroll kringutrustning/enheter: Flight Control
Rekommendera ålder: 14+y
RC-delar och tillbehör: Flight Control
Mängd: 1 st
Ursprung: Kina
Modellnummer: PIX2.4.8
Material: Kompositmaterial
Fyrhjulsdriftattribut: Assemblage
För fordonstyp: Flygplan
Varumärke: XDRC
Beskrivning:
- Avancerad 32-bitars CortexM4 ARM högpresterande processor, kan köra RTOS NuttX realtidsoperativsystem;
- Integrerad reservströmförsörjning och felbackupstyrenhet, huvudstyrenheten kan vara säkert kopplad till reservstyrning;
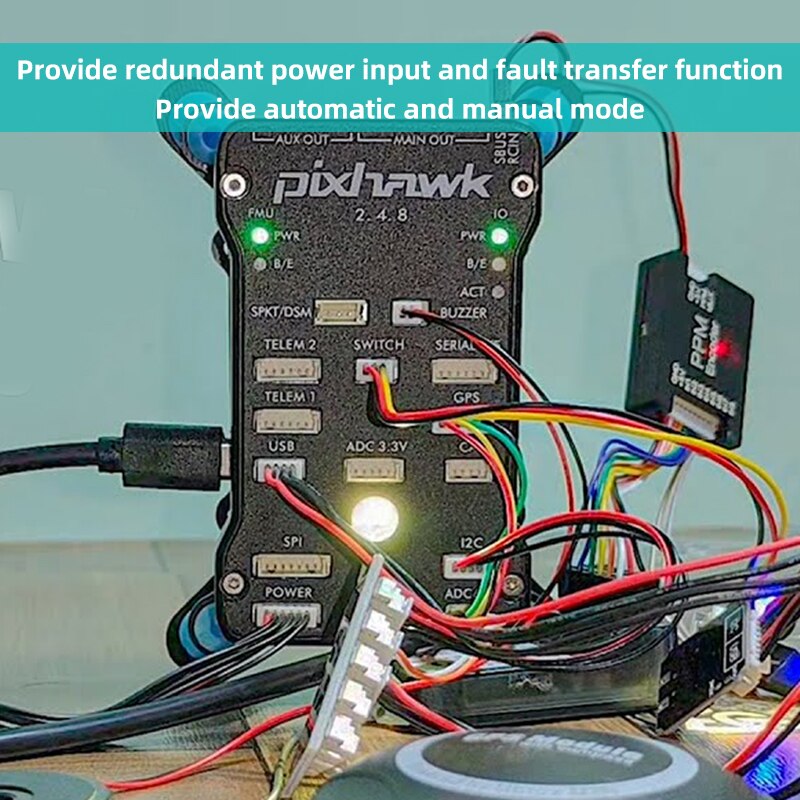
- Ger redundant strömingång och felöverföringsfunktion;
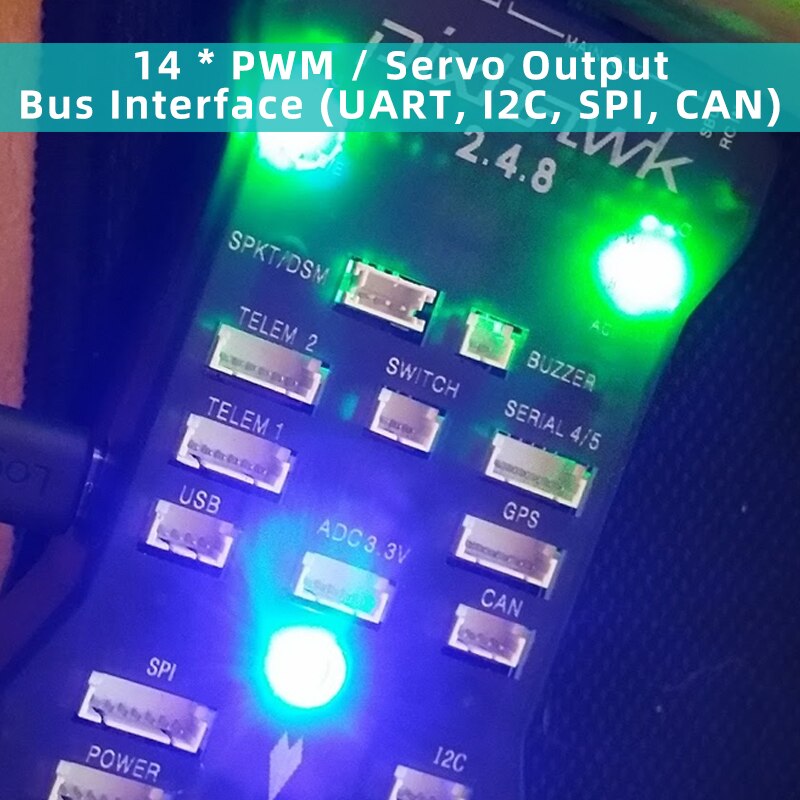
- 14 * PWM / servoutgång;
- Bussgränssnitt (UART, I2C, SPI, CAN);
- Tillhandahålla automatiskt och manuellt läge;
- Färg LED-lampa;
- Flertons summergränssnitt;
- Micro SD för att registrera flygdata;
Specifikation:
Kortet integreras med PX4FMU + PX4IO
Pixhawk är med nytt 32-bitars chip och sensorteknik
Processor: Gränssnitt: 'iwrIGTB KeHRISTB USB CAN(kontroller ett nätverk) EEES7+81033 LED Ja7FKJ Spi SPI #TJ96Q20) 12C 500E3273@ PoreR ADC 0 @ixitR 16E37+610%8 Dbduik 630S JPMS 9 Dbduik 6 30X JPMS 9 PSSMUS 298 $ Itetl)
32-bitars 2M flashminne STM32F427 Cortex M4, med hårdvaruflyttalsbehandlingsenhet
Huvudfrekvens: 256K, 168MHZ RAM
>
1. 5*UART(1*kompatibel högspänning; 2*hårdvaruflödeskontroll)
2. 2*CAN
3. Spektrum DSM / DSM2 / DSM-X satellitmottagare kompatibel ingång
4. Futaba SBUS-kompatibel ingång och utgång
5. PPM-signalingång
6. RSSI (PWM eller spänning) ingång
7. I2C
8. SPI
9. 3,3 och 6,6VADC ingång
10. Externt USB MICRO-gränssnitt


Related Collections