




ROBOTERA XHAND 1 Robothand - 12 frihetsgrader, 270° taktila fingertoppar, 80N grepp, 25 kg lyft, EtherCAT/RS485, ROS-kompatibel
ROBOTERA XHAND 1 Robothand - 12 frihetsgrader, 270° taktila fingertoppar, 80N grepp, 25 kg lyft, EtherCAT/RS485, ROS-kompatibel
ROBOTERA
Det gick inte att ladda hämtningstillgänglighet
Översikt
ROBOTERA XHAND 1 är en femfingerrobothand med full direktdriven ledmoduler och 12 aktiva DoF. Handen är i människohandens storlek (191 mm x 94 mm x 47 mm) och är designad för skicklig manipulation med högupplöst taktil känsla, robust greppstyrka och utvecklarvänliga gränssnitt för robotikforskning och integration.
Nyckelfunktioner
- Full direktdriven arkitektur med integrerade växeldrivna, kraftkontrollerade ledmoduler (3 i tummen; 9 över de andra fyra fingrarna).
- 12 fullt aktiva DoF; lateralt sväng av pekfingret på +/-15° för komplex manipulation i handen.
- Hög greppprestanda: fingertoppkraft 15N; maximal greppstyrka 80N; maximal greppvikt upp till 25 Kg (handflata upp) och 16 Kg (handflata vänster).
- Hög hastighet på aktivering som stödjer >2Hz öppen/stängd upprepning; visad fingerklickning upp till 10 CPS (Klick Per Sekund).
- 270° fingertoppstaktile täckning med fem tredimensionella taktila array-sensorer; helhandens upplösning 12x10 per fingertopp x 5.
- Tredimensionell kraftsensorik inklusive tangentiella krafter (X och Y); fingertoppens upprepningsnoggrannhet +/-0,20 mm.
- Bakdrivbar med dämpning <= 0,1 Nm; strömloop kraftkontroll och kraft-position kontroll för följsam interaktion.
- Utvecklarvänlig anslutning: EtherCAT och RS485 (USB); kompatibel med ROS1/ROS2, Ubuntu (Linux), x86 och ARM-arkitekturer, TwinCAT och vanliga robotarmar (inklusive xARM, Realman, UR).
- Hållbarhet bedömd till 1 000 000 utan belastning greppcykler; driftstemperatur -20°C ~ 60°C.
För förfrågningar, integrationsstöd eller köp i bulk, kontakta [email protected] or besök https://rcdrone.top/.
Specifikationer
| Parameter | Värde |
|---|---|
| Vikt | 1100 g |
| Mått (L x B x H) | 191 mm x 94 mm x 47 mm (Storleken på en vuxens hand) |
| Aktiv DoF (Totalt) | 12 |
| Passiv DOF (Totalt) | 0 |
| DoF Fördelning | Tumme x 3; Pekfinger x 3; Långfinger x 2; Ringfinger x 2; Lillfinger x 2 |
| Tumaktivering/Överföring | 3 växeldrivna kraftkontrollerade ledmoduler |
| Fyra-finger Aktivering/Överföring | 9 växeldrivna kraftkontrollerade ledmoduler |
| Fingerkapskonfiguration | Runda eller Rundade Fingertoppar |
| Lateral Svängning | -15°~+15° (Pekfinger) |
| Fingertoppsupprepningspositionsnoggrannhet | +/− 0.20 mm |
| Kontrolllägen | Positionskontroll (låg dämpning/hög dämpning), strömloop kraftkontroll, kraft-positionskontroll |
| Fingertryckskraft | 15N |
| Maximalt greppstyrka (hela handen) | 80N |
| Maximalt greppvikt (handflata vänster) | 16 Kg |
| Maximalt greppvikt (handflata upp) | 25 Kg |
| Tummens yttersta motstånd | Lilla lillfingret |
| Öppna/stänga repetitionshastighet | >2Hz |
| Back-drive dämpning (backdrivbar) | <= 0.1 Nm |
| Taktile Täckning | 270° femfinger fingertopp omfång |
| Antal Taktile Sensorer | Fem 270° tredimensionella omfångstaktile array-sensorer på fem fingertoppar |
| Taktile Upplösning (hela handen) | 12x10 (270° omfång per fingertopp) x 5 |
| Taktile Sensing Dimensioner | Tredimensionell kraftmätning (inklusive tangentiella krafter X och Y) |
| Hela-handens Kontrollfrekvens | 83Hz |
| Kommunikationshastighet | EtherCAT: 100MHz; RS485: 3MHz |
| Sensing Parametrar | Fingertoppar: 120 tredimensionella profilering array-krafter; Leder: position, hastighet, temperatur, ström (vridmoment) |
| Kontroll Parametrar | Ledposition; ledvridmoment; ledstyvhetskoefficient; leddämpningskoefficient |
| Lastfri Greppcykler | 1 000 000 cykler |
| Driftstemperaturområde | -20°C ~ 60°C |
| Arbetsströmspänning | 24V ~ 72V |
| Statisk Ström | 0.15A @48V, 7W |
| Maximal ström | 2.5A @48V, 120W |
| Kommunikationsgränssnitt | RS485 (USB), EtherCAT |
Tillämpningar
- Teleoperation: stödjer MR och handskteleoperation; Vision Pro teleoperation; Manus Gloves; Pico/Meta Quest.
- Robotarm och humanoid integration: kompatibel med xARM, Realman, UR och andra robotarmar.
- Forskning och simulering: precis URDF, taktil sensor simulering; lämplig för förstärkningsinlärning med Isaac Gym och Mujoco.
- Människa-maskin interaktion och drift av mänskliga verktyg med eftergivlig kraftkontroll.
Manualer
Xhand_adapter.stp
MH2.25_right_stp.zip
MH2.25_left_stp.zip
XHand_Control_ROS_Documentation.pdf
X-Hand_1_Product_Manual_1.0.pdf
X-Hand_1_User_Quick_Start_Instructions_1.0.pdf
Detaljer

ROBOTERA XHAND1 robothand med full direktdrift, som erbjuder verklig frihet och avancerad fingerfärdighet.

XHAND1 av ROBOTERA: humanoid femfingerhand med 12 frihetsgrader, 270° taktila sensorer per fingertopp, 80N greppkraft, 25 kg lastkapacitet. Designad för komplexa uppgifter och verktygshantering.

XHAND 1: Första fingerfärdiga handen med direktdrivna moduler per led. Utrustad med kraftfulla batteridrivna motorer, låg-dämpande reduktorer, precisionskodare och självutvecklade integrerade ledmoduler för avancerad robotmanipulation.
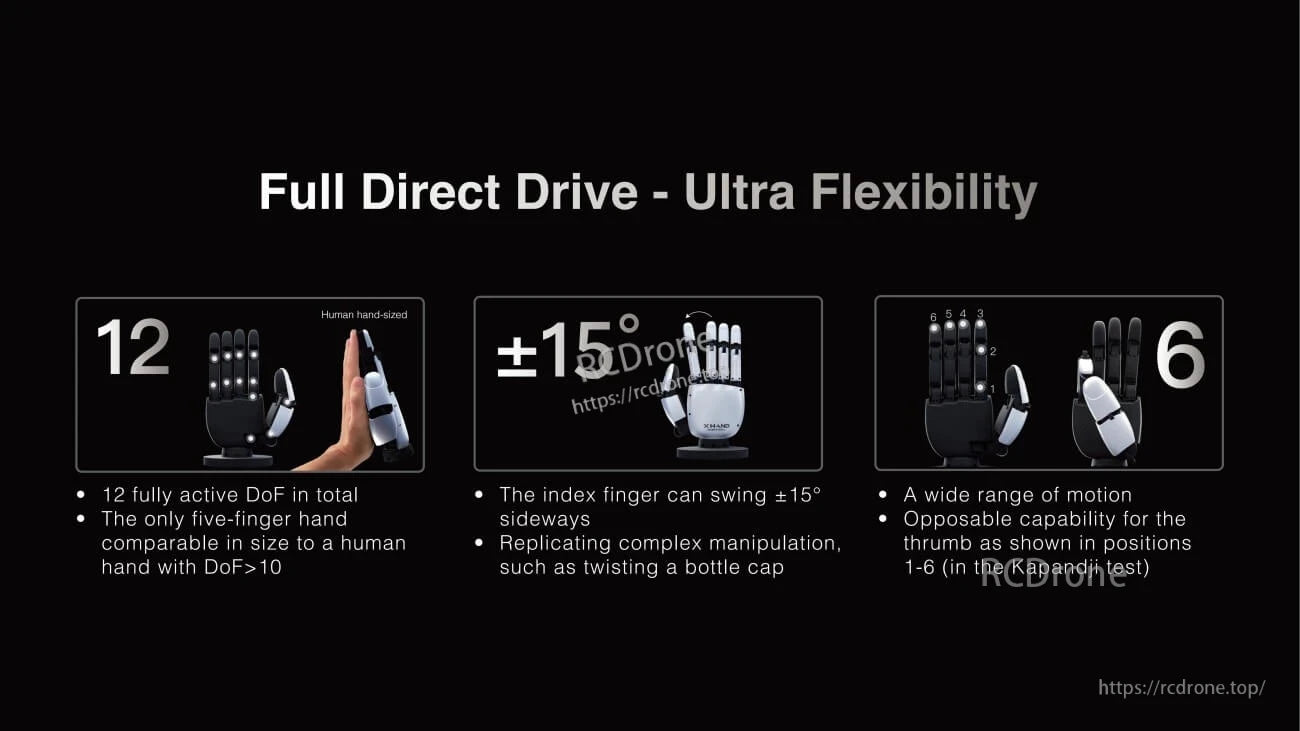
ROBOTERA XHAND 1 är en ultraflexibel, människostor robothand med 12 aktiva frihetsgrader. Dess pekfinger svänger ±15° åt sidan för komplexa uppgifter, och tummen erbjuder sex motsatta positioner för mångsidig manipulation.

ROBOTERA XHAND 1: 25 kg belastning, 80 N greppstyrka, full direktdrift, överträffar liknande kopplings-/senlösningar.

Full direktdriven robothand uppnår 10 CPS med växeldriven hastighet, vridmoment över 1 Nm, överträffar kopplings- och sen-system för överlägsen spelprestanda.

ROBOTERA XHAND 1 har 270° fingertoppssensorer med >100 punkter och 0,05 N noggrannhet för 3D-kraft, taktil och temperaturavkänning, vilket säkerställer överlägsen greppprestanda.
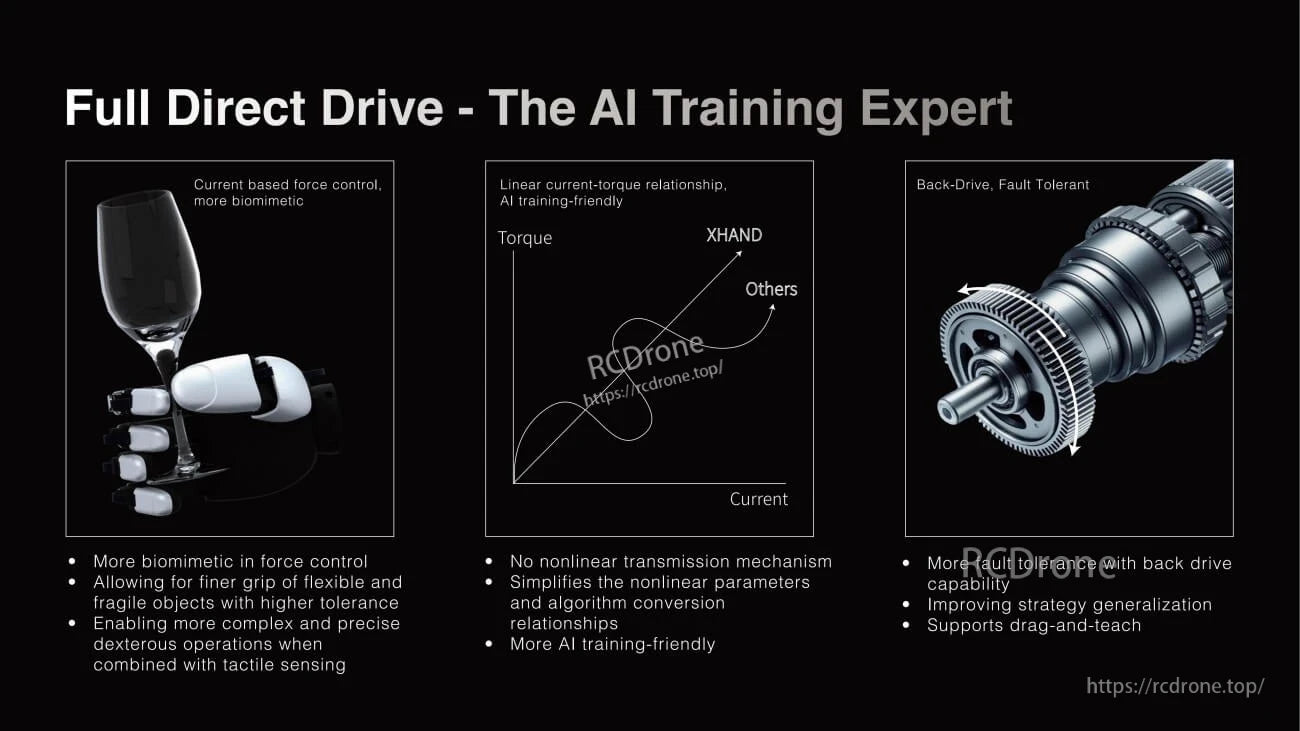
ROBOTERA XHAND 1 erbjuder biomimetisk kraftkontroll, linjär vridmoment-strömrespons för AI-träning och bakdriftsfel-tolerans—möjliggör precis hantering, förenklade algoritmer, drag-och-lär stöd och förbättrad strategi-generalisation.
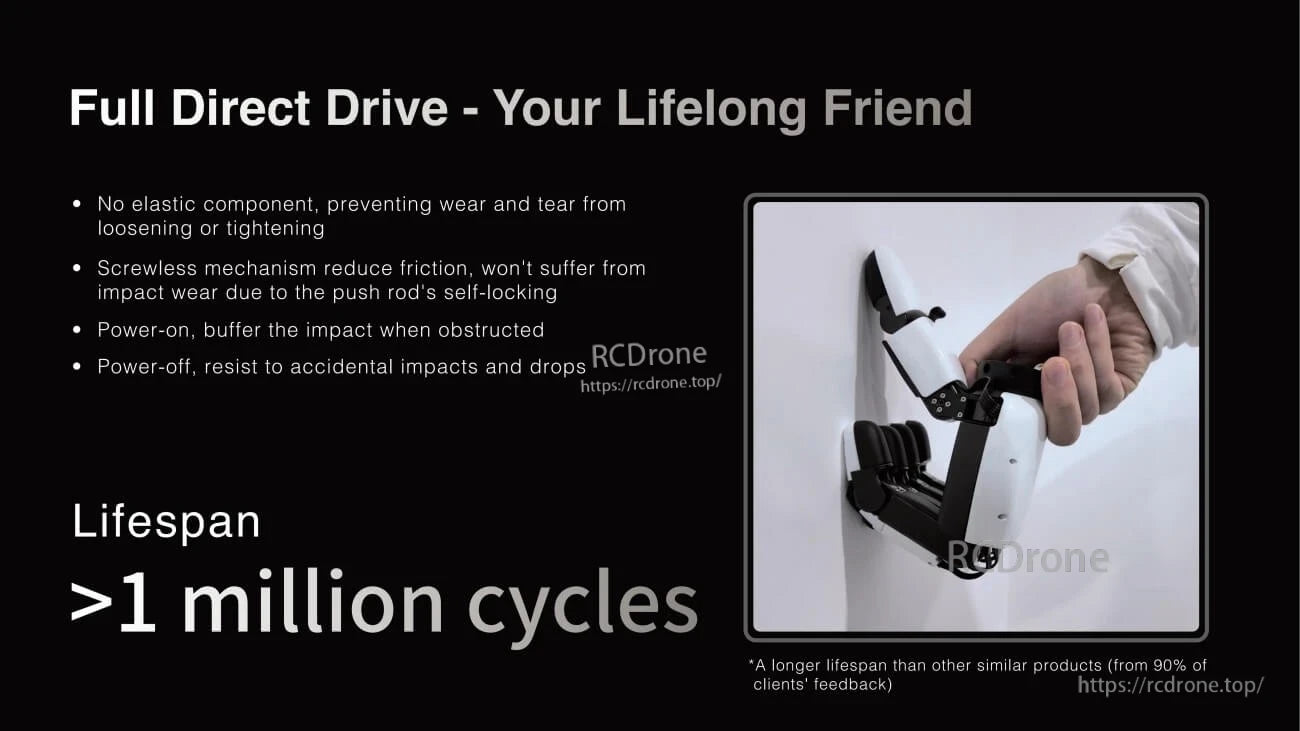
Full Direct Drive robot hand erbjuder hållbarhet utan elastiska delar eller skruvar, stötdämpning när den är påslagen, fallmotstånd när den är avstängd, och en livslängd som överstiger en miljon cykler—överträffar liknande produkter enligt kundfeedback.

ROBOTERA XHAND 1 stöder MR och handske teleoperation, kompatibel med ROS1/ROS2 och Ubuntu på x64/ARM. Funktioner EtherCAT/TwinCAT/RS485 för integration med xARM, Realman, UR robotarmar. Erbjuder precis URDF-modellering och taktil sensorimulering. Designad för utvecklarvänliga robotikapplikationer med plattformsoberoende flexibilitet och avancerade kontrollprotokoll.
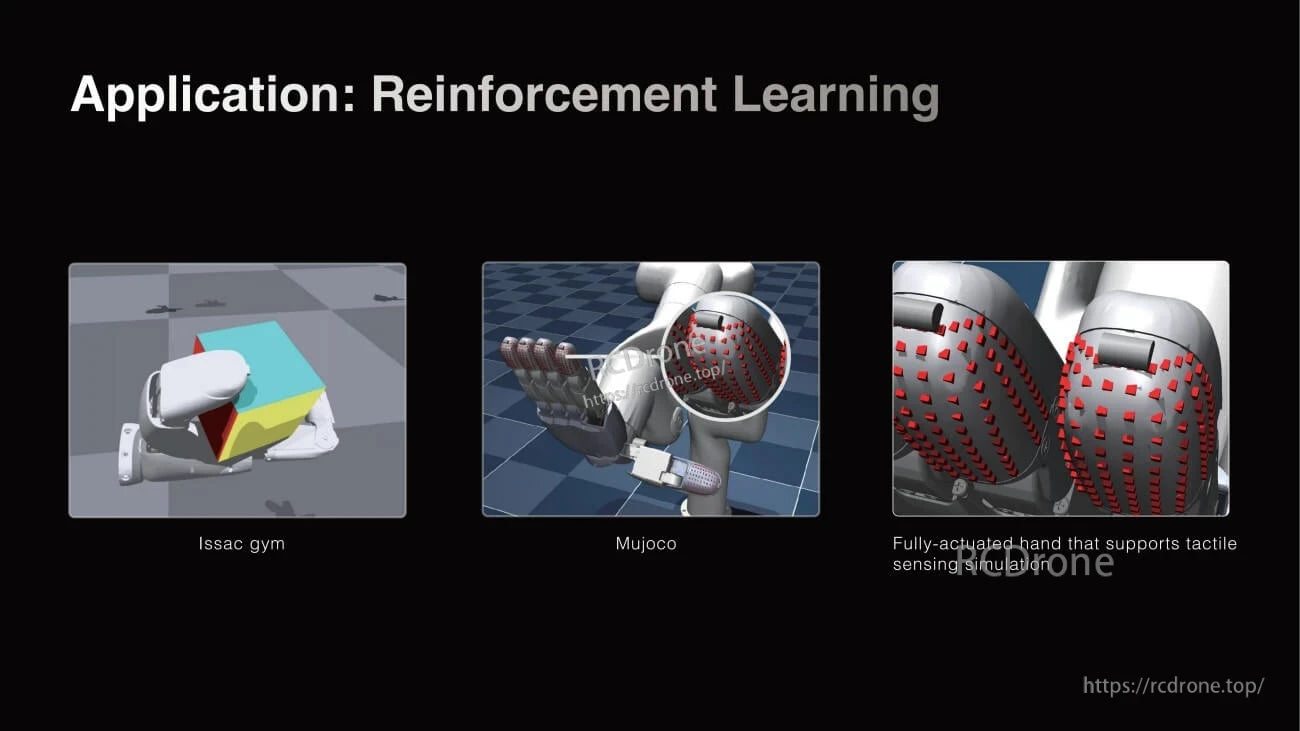
Förstärkningsinlärningsapplikationer: Issac gym, Mujoco, och fullt aktiverad hand med taktil sensorimulering för avancerad robotkontroll och träningsmiljöer.
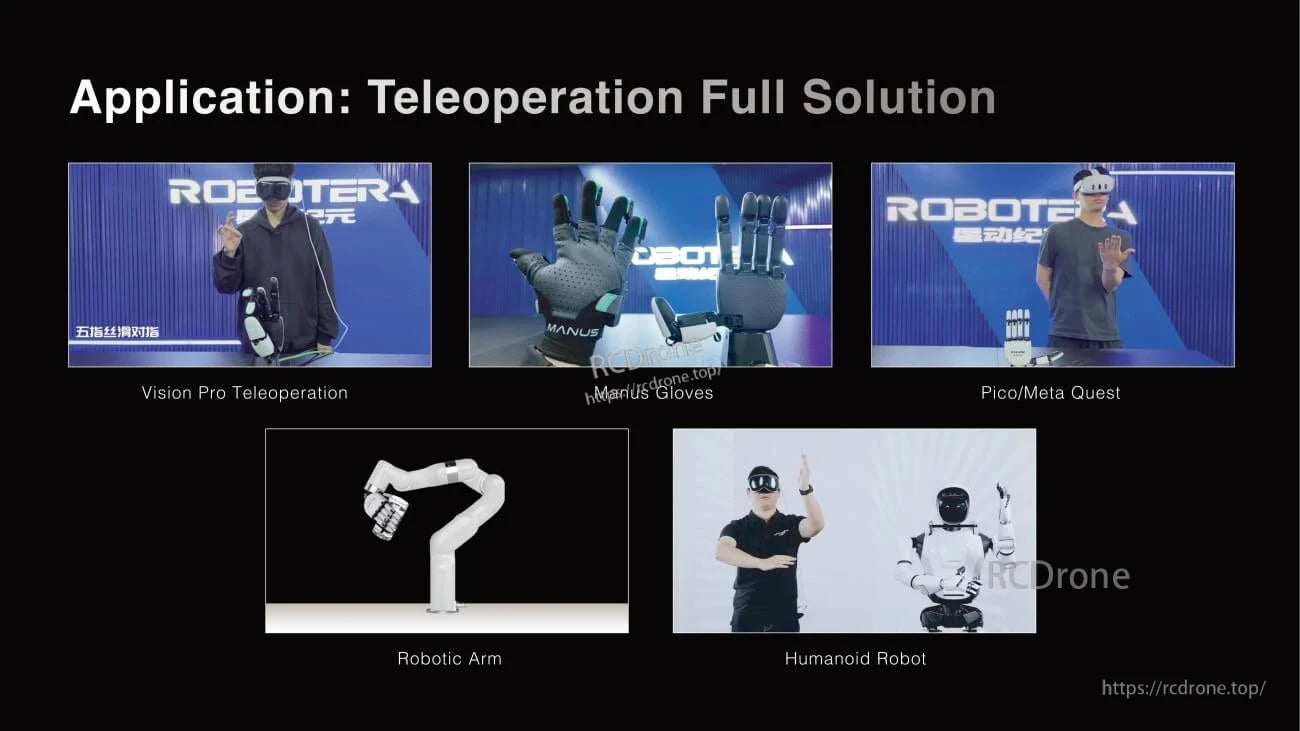
Teleoperation fullständig lösning med Vision Pro, Manus Gloves, Pico/Meta Quest, robotarm och humanoid robot för avancerad fjärrkontroll.
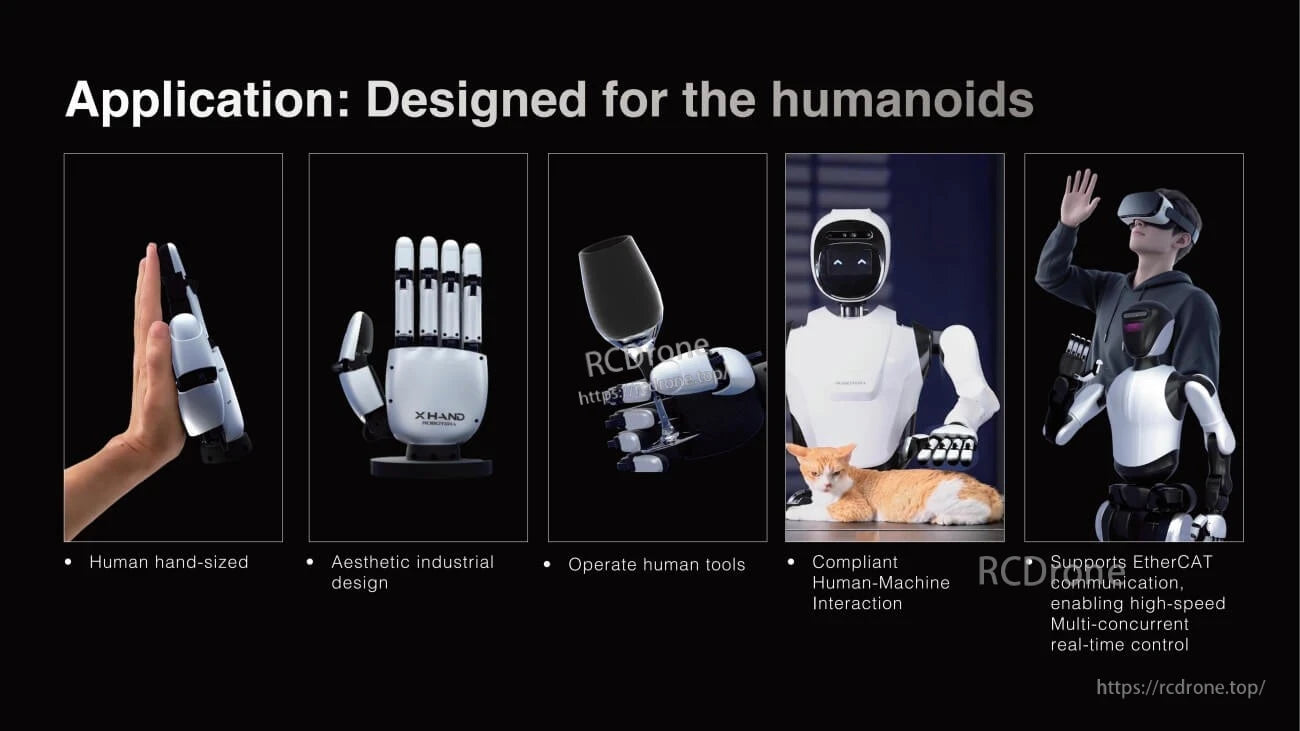
Mänsklig-stor robothand med estetisk design, fungerar med verktyg, möjliggör följsam interaktion, stöder EtherCAT för realtidskontroll.
Related Collections




