



S2-F290 Programmerbar Drönare - Pixwawk Open Source ROS SLAM AI Sekundär utveckling Industriell nivå för Drone Challenge
S2-F290 Programmerbar Drönare - Pixwawk Open Source ROS SLAM AI Sekundär utveckling Industriell nivå för Drone Challenge
RCDrone
Det gick inte att ladda hämtningstillgänglighet
Översikt
De S2-F290 programmerbar drönare är en högpresterande drönare av industriell kvalitet designad för sekundär utveckling och drönarutmaningar. Med en lastkapacitet på 2400g, a 6S 6000mAh batteri, och en maximalt kontrollavstånd på 10 km, den levererar precision med GPS-positioneringsnoggrannhet på ≈1–2m och vindmotstånd på nivå 3–4. Drivs av Pixhawk 2.4.8 flygkontroller med ROS SLAM-teknik med öppen källkod, drönaren stödjer avancerade funktioner som t.ex 3D LiDAR-kartläggning, YOLO-baserad objektigenkänning och formationsflygning. Dess 3 mm kolfiberram säkerställer exceptionell hållbarhet och stabilitet, testad under extrema förhållanden. Plattformen är mycket anpassningsbar och erbjuder funktioner som kinesiska/engelska QGC markstationsstöd, modulär utbyggbarhet och omfattande handledning, vilket gör den idealisk för forskning, konkurrens och utvecklingstillämpningar.
Specifikation
Flygplan
| Parameter | Specifikation |
|---|---|
| Namn | S2-F290 programmerbar drönare |
| Lastvikt | 2400g |
| Modell | S2-F290 |
| GPS-positioneringsnoggrannhet | ≈1–2m |
| Hjulbas | 290 mm |
| Maximal startvikt | 3190g |
| Batteri | 6S standard 6000mAh batteri |
| Kontrollavstånd | 10 km (rekommenderas inom 1000 m) |
| Vindmotstånd | Nivå 3–4 |
| Driftmiljö | Inomhus/Utomhus |
| Resultat av uthållighetstest | Detaljer |
|---|---|
| Propellrar | 7-tums |
| Batterikapacitet | 6S 6000mAh (5300mAh används) |
| Miljö | Vindstilla |
| Flygtid | 11 minuter 30 sekunder |
Flygkontrollant
| Komponent | Specifikation |
|---|---|
| FMU-processor | STM32H743 Cortex-M7, 480MHz, 2MB blixt, 1MB SRAM |
| IO-processor | STM32F103 Cortex-M3, 72MHz, 64KB SRAM |
| Sensorer | Accelerometer/gyroskop: ICM-42688-P |
| Accelerometer/Gyroskop: BMI055 | |
| Magnetometer: IST8310 | |
| Barometer: MS5611 | |
| Märkspänning | Max ingångsspänning: 6V |
| USB-strömingång: 4,75-5,25V | |
| Servoingång: 0-36V | |
| Märkström | Telemetri 1 Max utström: 1A |
| Kombinerad ström för andra hamnar: 1A | |
| Mekaniska data | Mått: 53,3 × 39 × 16,2 mm |
| Vikt: 39.2g | |
| Hamnar | - 14 PWM-utgångar (8 från IO, 6 från FMU) |
| - 2 seriella portar för allmänna ändamål | |
| - 2 GPS-portar | |
| - 1 I2C-port | |
| - 2 CAN-portar | |
| - RC-ingång för Spektrum/DSM, S.BUS, CPPM, etc. | |
| - Strömingångsport | |
| Andra funktioner | Driftstemperatur: -40–85°C |
Dator ombord
| Komponent | Specifikation |
|---|---|
| Datorkraft | 40 TOPPAR |
| GPU | 32 tensorkärnor med 1024 kärnor NVIDIA Ampere GPU |
| CPU | 6-kärnig Arm Cortex-A78AE v8.2 64-bitars, 1,5 GHz |
| RAM | 8GB 128-bitars LPDDR5 68GB/s |
| Lagring | SD-kort eller extern NVMe |
| Max CPU-frekvens | 1,5 GHz |
Fjärrkontroll
| Komponent | Specifikation |
|---|---|
| Driftspänning | 4,2V |
| Driftström | 100mA |
| Frekvensband | 2,4–2,483 GHz |
| Vikt | 525g |
| Mått | 130 × 150 × 20 mm |
| Batteritid | 20 timmar |
| Laddningsport | MIKRO-USB |
| Kontrollområde | 7 km |
GPS
| Komponent | Specifikation |
|---|---|
| Satellitmottagare | UBLOX-M9, 92 kanaler |
| Elektronisk kompass | QMC5883L |
| Satellitsystem | GPS L1 C/A, GLONASS L1OF, BeiDou B1, Galileo E1 |
| Satellitkanaler | 32 |
| Uppdateringshastighet | 25 Hz |
| Positioneringsnoggrannhet | 1,5 m CEP (idealisk miljö) |
| Starttid | Kallstart: 24s, varmstart: 1s |
| Mått | 25 × 25 × 8 mm |
| Vikt | 12g |
Batteri
| Komponent | Specifikation |
|---|---|
| Anslutningstyp | XT60 |
| Rekommenderad laddningsström | 3–5A |
| Batterikapacitet | 6000mAh |
| Nominell spänning | 22.2V |
| Urladdningshastighet | 75C |
| Mått | 50 × 44 × 158 mm |
| Vikt | 816g |
LiDAR
| Komponent | Specifikation |
|---|---|
| Laser våglängd | 905 nm |
| Räckvidd | 40m @ 10% reflektivitet, 70m @ 80% reflektivitet |
| Minsta detektionsområde | 0,1 m |
| Synfält | Horisontell: 360°, Vertikal: -7° till 52° |
| Point Cloud Output | 200 000 poäng/sekund |
| Point Rate | 10 Hz |
| Skyddsnivå | IP67 |
| Driva | 6,5W (25°C miljö) |
| Spänningsområde | 9–27V DC |
| Mått | 65 × 65 × 60 mm |
| Vikt | 265 g |
Djupkamera
| Komponent | Specifikation |
|---|---|
| Djupteknik | Dubbel infraröd |
| Djup betraktningsvinkel | 87° × 58° (horisontell × vertikal) |
| Djupupplösning | 1280 × 720 |
| Djup noggrannhet | <2 % inom 2 m |
| Depth Frame Rate | 90 fps |
| Djupområde | 0,3–3m |
| Mått | 90 × 25 × 25 mm |
| Driftmiljö | Inomhus/Utomhus |
Kamera med en lins
| Komponent | Specifikation |
|---|---|
| Max upplösning | 2 MP (1920 × 1080) |
| Max bildhastighet | 30 fps |
| Synfält | ~90° |
| Kabellängd | ~1.5m |
| Mått | 35 × 35 × 30 mm |
Funktionstabell
| smörjelse | Grundläggande konfiguration | Tillval D435 | Tillval D435 + 4G-modul |
|---|---|---|---|
| Höjdhållning, svävande, återvänd hem | ✔ | ✔ | ✔ |
| Landning, stabilisering, waypointflygning | ✔ | ✔ | ✔ |
| Fjärrkontrollflyg | ✔ | ✔ | ✔ |
| Kommunikation mellan flygledare och omborddator | ✔ | ✔ | ✔ |
| QR-kod igenkänning och landning | ✔ | ✔ | ✔ |
| Objektigenkänning och släppning | ✔ | ✔ | ✔ |
| Samtidig kartläggning och undvikande av hinder | ✔ | ✔ | ✔ |
| 3D LiDAR kartläggning och positionering | ✔ | ✔ | ✔ |
| YOLO-baserad objektigenkänning | ✘ | ✔ | ✔ |
| Objektigenkänning och spårning | ✘ | ✔ | ✔ |
| 4G fjärrkontroll | ✘ | ✘ | ✔ |
Paketet inkluderar
Grundläggande konfiguration
- Ram: F290 kolfiberram
- Motorer: 4× T-motor F100 Kv1100
- ESC: 4× FlyFun T-rex 5 45A
- Propellrar: 4× 7-tums trebladiga propellrar
- Flygkontrollant: Pixhawk6mini
- Batteri: 6S standardbatteri 6000mAh
- Laddare: 6S batteriladdare
- Dator ombord: Jetson Orin Nano 8G + WIFI-modul
- SSD: 256G
- LiDAR: Livox MID360
- Kamera: 150° vidvinkel USB-kamera
- Fjärrkontroll: Cloud T10 (inkluderar datamottagare)
Valfri konfiguration: D435
Inkluderar alla komponenter från Grundläggande konfiguration, plus:
- Kamera med dubbla objektiv: D435
Valfri konfiguration: D435 + 4G-modul
Inkluderar alla komponenter från Grundläggande Konfiguration, plus:
- Kamera med dubbla objektiv: D435
- 4G-modul
Detaljer
S2-F290 programmerbar drönare
- ✔ Teknisk support, problemfri service efter försäljning
- ✔ Ger tävlingsexempel, anpassningsbara
- ✔ Kinesisk/engelsk mobil markstation
- ✔ Hög stabilitet, hög prestanda
- ✔ Inomhus/Utomhus
S2-F290 är en banbrytande drönare skräddarsydd för drönarracing, specialiserad på utforskning och innovation.Designad för att integrera avancerad teknik och obegränsad kreativitet, den kan anpassas till olika komplexa miljöer, vilket gör flygutforskning mer tillgänglig och effektiv.
Denna drönare har en kompakt design med enorm kraft. Den erbjuder en mängd tävlingsexempel, vilket gör att användare snabbt kan bemästra och optimera dess prestanda. Utrustad med en dedikerad kinesisk/engelsk mobil markstation, förbättrar den avsevärt bekvämligheten med drönare. Dessutom ger den konkurrenskraftiga källkodsförklaringar och anpassningsbarhet för att säkerställa att användare kan uppnå sina önskade funktioner på kortast tid samtidigt som de utmärker sig i konkurrenssituationer.

Tillgodose behoven av utveckling / Konkurrens / Forskning
| Kategori | Detaljer |
|---|---|
| ROS Grundläggande kunskaper | - Fjärrkontroll |
| - Kommunikation mellan flygkontroller och omborddator | |
| Grundläggande funktioner | - Ruttplanering |
| - QR-kodigenkänning och positionering | |
| - Offboard autonom patrull | |
| Avancerade funktioner | - QR-kodigenkänning för landning |
| - Objektigenkänning och släpp | |
| - Samtidig kartläggning och undvikande av hinder | |
| - 3D LiDAR-kartläggning och positionering | |
| - YOLO-baserad objektigenkänning | |
| - Webbaserad videoöverföring | |
| - Utomhusformationsflygning | |
| - Land-Air Collaborative Formation | |
| D435-kamerafunktioner som tillval | - VINS visuell positionering |
| - YOLO-baserad objektigenkänning och spårning | |
| Valfria 4G-kommunikationsfunktioner | - 4G-fjärrkontroll |
Autonom undvikande av hinder, omfattande säkerhetsgaranti
Genom att använda 3D LiDAR för att undvika hinder, kombinerar drönaren global ruttplanering med lokal dynamisk undvikande av hinder för att exakt upptäcka hinder från alla riktningar. Den stöder automatiskt stopp såväl som kontinuerlig flygning, vilket möjliggör flexibelt undvikande av föremål längs flygbanan, vilket säkerställer en säkrare flygupplevelse.

QR-kodigenkänning och landning
Drönaren aktiverar kameran och QR-kodigenkänningsmodulen för att få tag på positionsinformationen i realtid för QR-koden. Under nedstigningen justerar drönaren sin position dynamiskt, vilket säkerställer exakt inriktning med kamerans synfält innan den fortsätter att landa.
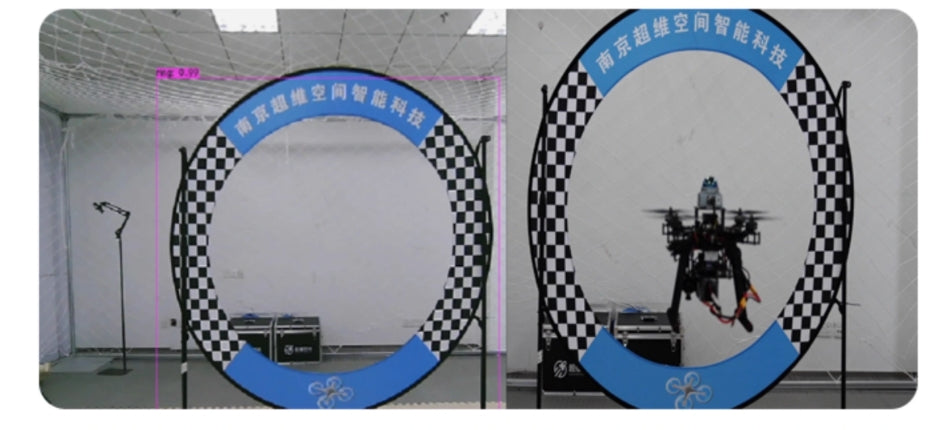
YOLO Objektigenkänning
Drönaren använder YOLOv8 för objektigenkänning, och hämtar positionsinformationen för den cirkulära ramen i realtid. Den justerar självständigt sin position och navigerar genom den cirkulära ramen.
Utomhus formation flyger
Drönaren använder svärmbildningsteknik, vilket möjliggör koordinerad kontroll av flera drönare för att uppnå formationsflygning.Genom att utnyttja avancerade kommunikations- och kollaborativa kontrollalgoritmer underlättar den kommunikation i realtid och informationsutbyte mellan drönare, och synkroniserar deras rörelser och positioner för att bilda en tät formation.

Land-Air Collaborative Formation
Denna plattform stöder samarbetsbildning mellan land- och flygdrönare. Genom att utnyttja ett lokalt nätverk med topologistrukturer för sammankoppling av enheter, använder den UDP-kommunikation och anpassade protokoll för att säkerställa höghastighets och stabil kommunikation. Med PID-kontroll uppnår den synkroniserad följning mellan huvuddrönaren och flera slavdrönare, vilket säkerställer formationens stabilitet och driftseffektivitet.

Exempel på tävling
Ger exklusiva tävlingsscenarier med steg-för-steg-vägledning, vilket gör att deltagarna enkelt kan anpassa sig till olika typer av tävlingar.



Funktioner hos den programmerbara drönaren S2-F290
Hög kostnadsprestanda
- Designad för nybörjare för att minska inlärningskurvan och göra det lättare att bemästra drönardrift.
- Prissatt för överkomliga priser, vilket gör den till den perfekta inlärningsdrönaren för studenter och entusiaster.
Hög stabilitet
- Testad i olika extrema förhållanden under tre år.
- Utrustad med en 3 mm tjock kolfiberram för ökad hållbarhet och stabilitet.
- Tillåter användare att få erkännande i sin första tävlingsupplevelse.
Expanderbarhet
- Stöder avancerad anpassning för olika applikationer.
- Kompatibel med olika expansionskomponenter för att kontinuerligt förbättra drönarens prestanda och funktionalitet.
Bekymmersfri kundservice
- Professionellt team som ger omfattande vägledning och stöd.
- Erbjuder gratis reparationer för hårdvaruskador orsakade av driftfel under garantiperioden (exklusive tillbehör och batterier).
Anpassningsbar
- Ger stöd för exklusiv utveckling i ROS och QGC.
- Stöder hög noggrannhet på över 98 % för kartläggning och navigering.
- Kompatibel med RTK/GPS-moduler, logotyper och olika unika funktioner.

Markstationskonfiguration
Använda Pixhawk 2.4.8 Flight Controller
Utrustad med den senaste standard 32-bitars STM32F427-processorn och MS5611-barometern, erbjuder denna flygkontroll rikligt med gränssnitt och hög kostnadsprestanda som ett alternativ med öppen källkod.
1. Exklusiv djupt anpassad QGC markstation
- Uppnår över 98 % lokalisering till kinesiska.
- Stöder avancerade funktioner som NTRIP.
2. Mobil QGC markstation
- Tillhandahåller en mobil version av QGC markstation, vilket möjliggör sömlös drift från en smartphone.
3. Wi-Fi eller 4G direktanslutning
- Anslut helt enkelt via Wi-Fi för att använda en smartphone eller dator.
- Notera: "ezuav"-systemet visar att det är anslutet till enheten men inte kan ge internetåtkomst.

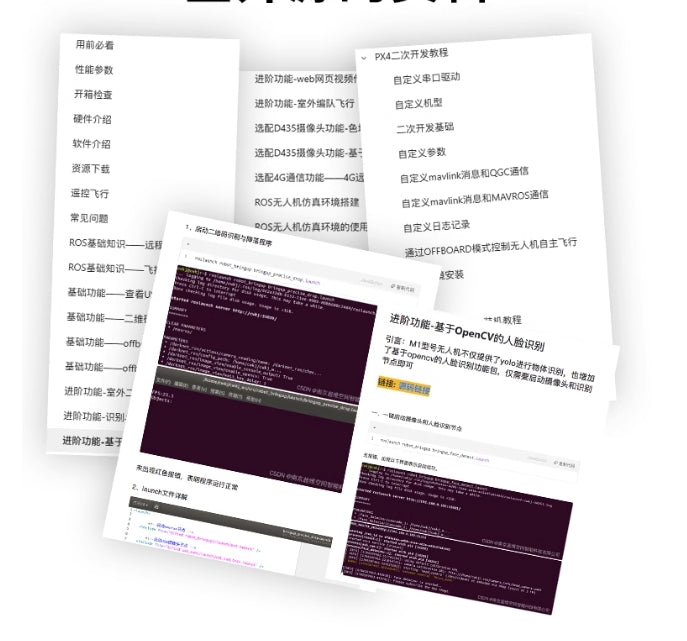
Omfattande handledningar och resurser med helt öppen källkod
- Extremt detaljerade användarhandledningar som täcker alla aspekter av S2-F290-drönarens funktionalitet.
- Material med helt öppen källkod, inklusive:
- Programvaruintroduktioner och installationsguider.
- Handledningar för grundläggande och avancerade funktioner, såsom OpenCV-baserad objektigenkänning, 3D-kartläggning och autonom flygning ombord.
- Anpassade utvecklingsinstruktioner för PX4 och MAVLink kommunikation.
- Felsökning Vanliga frågor, ROS-miljökonfiguration och driftsteg.
Related Collections


