CUAV Högprecision RM3100 C-Kompass Extern Kompass Magnetometer för Pixhawk PX4 ArduPilot DroneCAN/UAVCAN
CUAV Högprecision RM3100 C-Kompass Extern Kompass Magnetometer för Pixhawk PX4 ArduPilot DroneCAN/UAVCAN
CUAV
Ordinarie pris
$203.00 USD
Ordinarie pris
Försäljningspris
$203.00 USD
Enhetspris
per
Skatter ingår.
Frakt beräknas i kassan.
Det gick inte att ladda hämtningstillgänglighet
Översikt
CUAV C-Compass är en extern kompass (högprecisionsmagnetometer) byggd kring RM3100 magnetiska sensorn för Pixhawk och PX4 kontroller ekosystem. Den använder DroneCAN/UAVCAN busskommunikation och är kompatibel med ArduPilot och PX4 plattformar, med en inbyggd STM32F4 processor som kör CUAV M4C mjukvaruarkitektur för stabil riktningmätning i elektriskt bullriga luftfarkoster.
Nyckelfunktioner
- RM3100 magnetisk sensor
- Inbyggd STM32F4-processor
- CUAV självutvecklad M4C mjukvaruarkitektur
- Kompatibel med APM/PX4 flygmjukvaruplattform
- DroneCAN/UAVCAN protokollstöd
- Designad för låg ljudnivå och anti-interferensprestanda när den används som en extern kompass
Specifikationer
| MCU | STM32F412 (32 Bit Arm Cortex-M4, 100MHz, 512KB FLASH, 256KB RAM) |
| Sensor | RM3100 |
| Mjukvaruarkitektur | CUAV M4C |
| Protokoll | DroneCAN/UAVCAN |
| Kommunikationshastighet | 2Mb |
| Uppdateringsfrekvens | 80Hz |
| Brus | 15nT |
| Noggrannhet | 0.25° (effektivt värde) |
| Repetitionsnoggrannhet | 0.05° |
| Upplösning | 0.01° |
| Känslighet | 13nT |
| Omfång | -800 μT till +800 μT |
| Kontrolltyp | PX4/ArduPilot (CUAV/Pixhawk etc.) |
| Gränssnitt | GHR-04V-S |
| Driftspänning | 4.75-5.3V |
| Driftstemperatur | -20 till 80°C |
| Driftfuktighet | 5% till 95% (icke-kondens) |
| Höljesmaterial | Aluminiumlegering |
| Storlek | 31.5 x 31.0 x 14.0mm |
| Vikt | 13g |
| Listad vikt | 0.5 kg |
| Listade dimensioner | 20 x 10 x 10 cm |
Alternativ
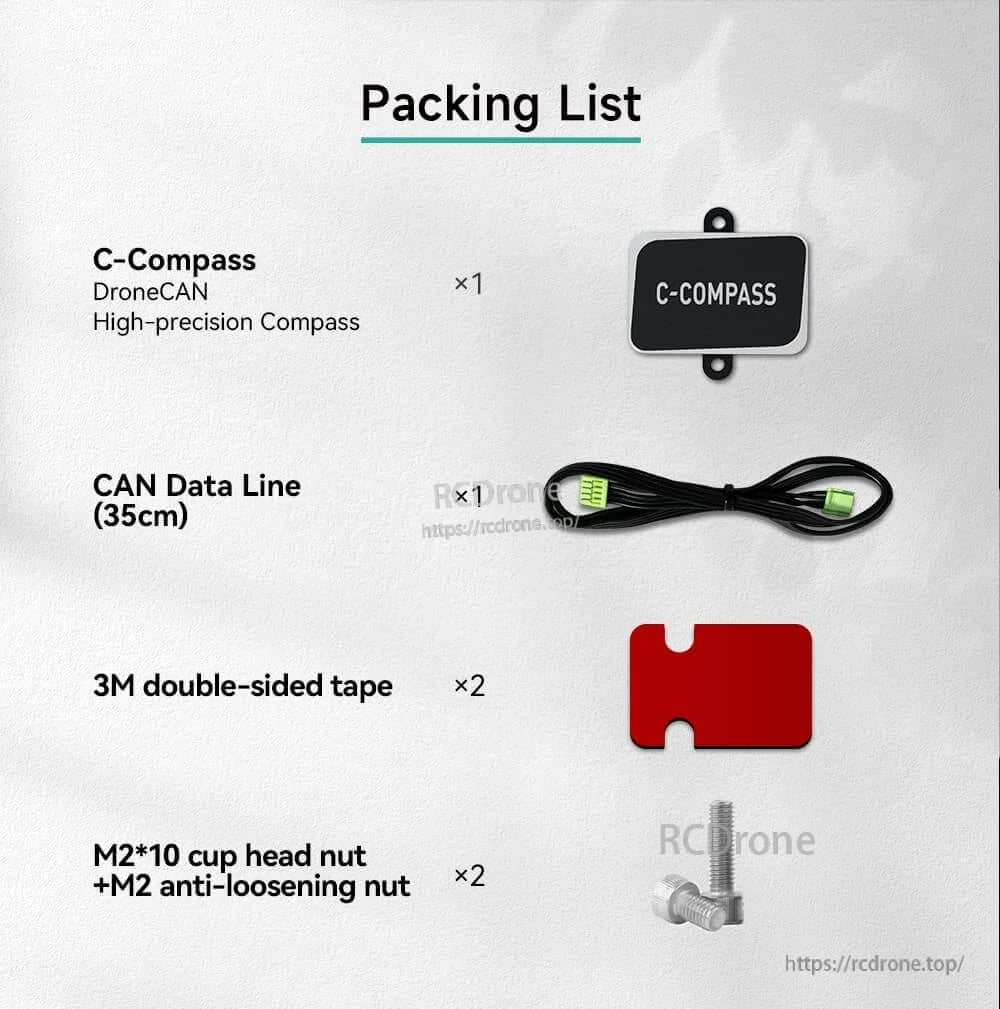
- C-Kompass * 3 st
- C-Kompass & NEO 3 GPS / Set
- C-Kompass & NEO 3 Pro GPS / Set
- C-Kompass & NEO 3X GPS / Set
Tillämpningar
- Extern kompass/riktning för Pixhawk och CUAV autopilotbyggen som kör PX4 eller ArduPilot
- Förbättra stabiliteten i magnetmätningar genom att montera bort från störningskällor (kablar, batterier, motorer)
För frågor om integration och kompatibilitet (DroneCAN/UAVCAN-installation, ArduPilot/PX4-parametrar, kablage), kontakta [email protected] or besök https://rcdrone.top/.
Related Collections